超空泡航行器流體動力CFD計算
2015-10-25 05:44:11李雨田
水下無人系統學報 2015年4期
李雨田
(中國船舶重工集團公司 第710研究所,湖北 宜昌,443003)
超空泡航行器流體動力CFD計算
李雨田
(中國船舶重工集團公司 第710研究所,湖北 宜昌,443003)
超空泡航行器運動在超空化流動模式下,流場內涉及固、液、氣3種介質,空泡與航行器相互耦合作用極為復雜。文中給出了超空泡航行器減阻特性、非線性、非定常與不確定性、流體慣性力較小4種典型流體動力特性,揭示了超空泡航行狀態下航行器的流體力學本質。通過仿真計算,得到了空泡外形隨空化數、攻角、舵角的變化趨勢,利用計算流體力學(CFD)方法計算給定外形航行器在超空泡流型下的受力情況,分析了航行器流體動力特性變化,并給出了影響其變化的相關因素。該研究可為超空泡航行器動力學建模和彈道計算提供參考。
超空泡航行器;空泡外形;流體動力特性;計算流體力學(CFD)
0 引言
長期以來,水下航行器的航速都比較低,制約水下航行器速度提高存在2個障礙:首先是航行阻力大,航行器的航行阻力與流體介質密度成正比,水下航行器與空中飛行器相比,由于水的密度是空氣的800倍,同樣條件下,水下航行器的航行阻力是空中飛行器飛行阻力的800倍,所以,水下航行器的航行速度比空中飛行器的飛行速度低2~3個量級。其次,水下航行器隨著航行速度的提高,其表面局部的壓力就會降至水的飽和蒸汽壓力,發生汽化,形成氣泡與局部空泡。這種空泡的起始、發展及潰滅受環境等多種因素影響,十分復雜,難以預計與控制,并且伴隨產生振動、噪聲與剝蝕等一系列不良后果。這種空化現象是水下高速航行器的一種客觀物理現象,當航速超過60 kn以上時難以避免。俄羅斯科學家經過長期的研究,提出了“超空泡航行器”的新概念[1],把水下航行器基本包圍在空泡之中,如圖1所示,使航行器壁面附近的介質由水變為氣體,水下航行器表面與水隔絕,從而大大降低航行阻力,解決了水下航行器阻力大的難題。降低航行器周圍流體介質的密度是超空泡減阻的基本原理。在水下航行器自然空化發生的基礎上,通過人工通氣[2-3],使航行器表面的空泡面積增大,發展為超空泡,并使空泡穩定。通氣方法不僅可以實現航行器的超空泡,而且使得對空泡的控制成為可能,可以有效地避免局部空化造成的振動、噪聲等不良后果。這就從根本上解決了阻礙水下航行器速度提高的兩大難題,為實現水下航行器航行航速的大幅度提高奠定了理論基礎。
圖1 水下超空泡航行器Fig.1 Underwater supercavity vehicle
利用超空泡減小水下航行器的阻力,是空化應用中最具重大意義的發現,如同空氣介質中飛行器速度突破音障一樣,超空泡減阻將給水下航行器帶來一場影響深遠的技術革命,甚至改變未來海軍的作戰模式。
1 超空泡航行器流體動力特性
超空泡航行器流體動力需將航行器外形、空泡外形、航行器外形和空泡外形的幾何匹配統一起來,綜合考慮相互之間的影響。超空泡航行器外形主要由空化器、殼體及尾舵3部分組成,3部分的流體動力成因具有各自明顯的特征。位于航行器前端的空化器其迎流面總是處于沾濕狀態,流體動力與迎流攻角或空化器舵角有關,受空泡的影響較小。尾舵與空泡的關系可以簡化為與尾舵穿刺空泡長度(尾舵展向位于主體空泡之外的長度)的關系,尾舵穿刺空泡長度可通過“超空泡流型”[4-5]計算獲得,在穿刺長度一定時,尾舵受力變化與舵角有關。殼體的流體動力主要來自殼體尾部的沾濕面,所以也常稱為航行器尾部流體動力,尾部流體動力是超空泡航行器流體動力的主要部分,也是變化較大、計算誤差較大的部分。
超空泡航行器運動在超空泡流動模式下,只有首部空化器、尾部殼體和尾舵局部沾濕,具有不同于常規水下航行器的流體動力特性,主要表現在以下幾個方面。
1)減阻特性。航行器絕大部分表面不與水接觸,摩擦阻力大幅降低,通過適當的外形設計,自主航行的水下超空泡航行器阻力系數與同級別全沾濕航行器相比可以降低1個量級。
2)非線性。由于細長體空泡與航行器位置關系隨攻角增大而快速非線性增大,導致航行器流體動力的非線性。超空泡航行器流體動力的非線性還表現在操縱面上,對于安裝在尾部的穩定和操縱面,由于空泡偏離導致沾濕面積的非線性變化,使操縱面穿刺深度和沾濕面積隨攻角非線性變化,形成非線性的流體動力。
3)非定常性與不確定性。由于超空泡的尺度受航行深度、速度、通氣流量以及泄氣方式的影響,空泡尺寸處于脈動狀態,難以精確確定,導致流體動力具有顯著的非定常性與不確定特征。
4)流體慣性力較小。在超空泡航行狀態下,由于加速度與沾濕面積都較小,流體附加質量相對于航行器質量為小量。
航行器的流體動力有多種分類方法或結構模式[6]。文章按運動狀態分解超空泡航行器流體動力,即采用位置力、阻尼力和慣性力的流體動力結構模式。
2 空泡外形仿真與流體動力計算
2.1超空泡航行器外形
文中參考 “暴風雪”魚雷外形參數[7-8],結合西北工業大學課題組研究成果[9-10]給出一種超空泡航行器外形,采用1:1比例模型作為輸入參數用于CFD計算。航行器外形由空化器(圓盤形)、圓錐段、圓柱段、尾噴管、十字尾舵(楔形翼)等部分構成,航行器外形及主要參數如圖2所示。
2.2CFD計算方法
1)計算原理
位置力的計算原理參照水洞測力試驗,固定模型,讓水以指定相對攻角α流過模型,測得模型承受的流體動力和力矩隨相對攻角的變化曲線。如圖3所示,取一柱形計算域,通過改變入口速度及其方向矢量可以得到不同空化數和攻角,計算得到隨空化數和攻角變化的位置力系數。

圖2 超空泡航行器外形及主要參數(單位:mm)Fig.2 Shape and main parameters of a supercavity vehicle(unit:mm)
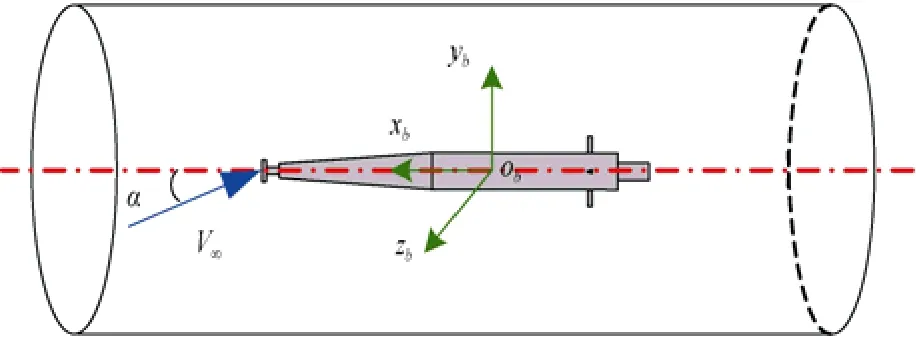
圖3 位置力計算原理Fig.3 Calculation principle of position force
旋轉導數計算原理見圖4,利用FLUENT軟件提供的旋轉參考框架,將相對運動轉換為定常流場。指定旋轉參考框架的角速度,即可模擬俯仰/偏航運動,做定常流場計算,得到不同角速度下的流體動力系數,線性擬合得到旋轉導數。
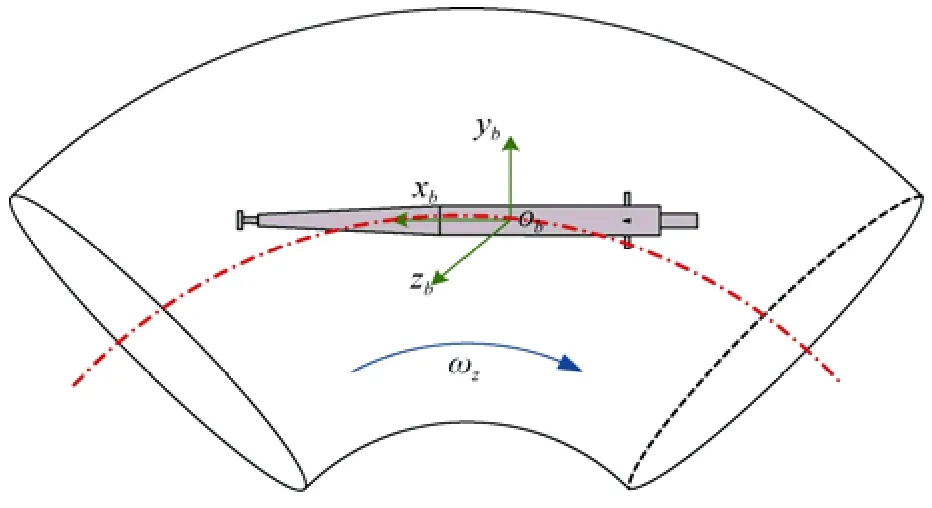
圖4 旋轉導數計算原理Fig.4 Calculation principle of rotary derivative
2)計算域與網格劃分
計算域為1個直徑為50倍模型最大直徑、長度為30倍模型長度的圓柱體。上游速度入口距離頭部端面為5倍模型長度,下游壓力出口距離頭部端面為25倍模型長度,外圍流場壓力出口距離模型中心線為25倍模型最大直徑。建模時取一半計算域,采用結構化六面體網格劃分流場,利用網格接口技術解決整個計算域內網格密度的非均勻分布問題,并在空泡可能產生的區域加密網格,以便更清晰地撲捉空泡界面。位置力計算域如圖5所示。
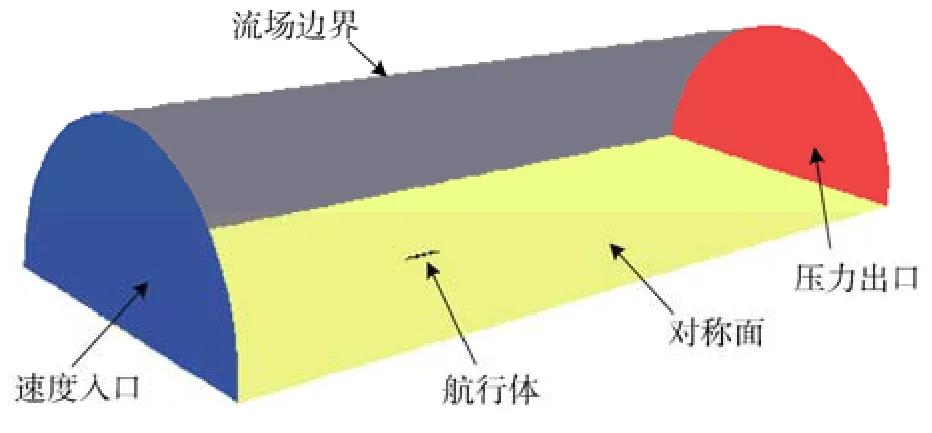
圖5 位置力計算域與邊界條件Fig.5 Computation domain and boundary condition of position force
阻尼力計算區域與邊界條件設置和網格劃分情況與位置力相似,不再贅述。其計算區域與邊界條件設置如圖6所示。
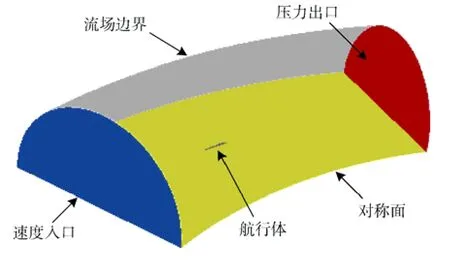
圖6 阻尼力計算域與邊界條件Fig.6 Computation domain and boundary condition of damping force
3)計算模型參數設置
CFD求解模型及參數的設置見表1,邊界條件的參數設置見表2。
2.3空泡外形與流體動力計算結果
2.3.1位置力計算
1)空化器舵效
計算空化器在空化數為0.021 17,舵角在0°~1.5°范圍的受力情況,每0.3°為1個計算工況。圖7為空化器舵角變化對空泡形態的影響,隨著舵角的增大,空化器在航行器軸線上的有效投影面積減小,投影面積由正圓向橢圓變化,造成空泡尺寸減小,同時空泡截面由正圓向橢圓變化。
圖8為空化器流體動力系數隨舵角變化的曲線。圖8(a)為阻力系數曲線,由計算結果可知空化器阻力系數隨舵角增大逐漸減小,其量值變化較小,主要原因是在小舵角范圍內空化器的迎流面積隨舵角增大而減小,但減小的量值較小。圖8(b)為空化器升力系數隨舵角變化曲線,升力系數隨舵角增大而增大,變化趨勢較復雜,在0°~ 0.9°舵角范圍,升力系數基本呈線性變化,當舵角大于0.9°時,升力系數增大較快,基本按指數形式增大。圖8(c)為空化器俯仰力矩系數隨舵角變化曲線,力矩系數為零,原因在于超空泡航行器動力學建模的作用中心為空化器,航行器以空化器為基點做俯仰、偏航擺動,故空化器只產生升力不產生俯仰力矩。
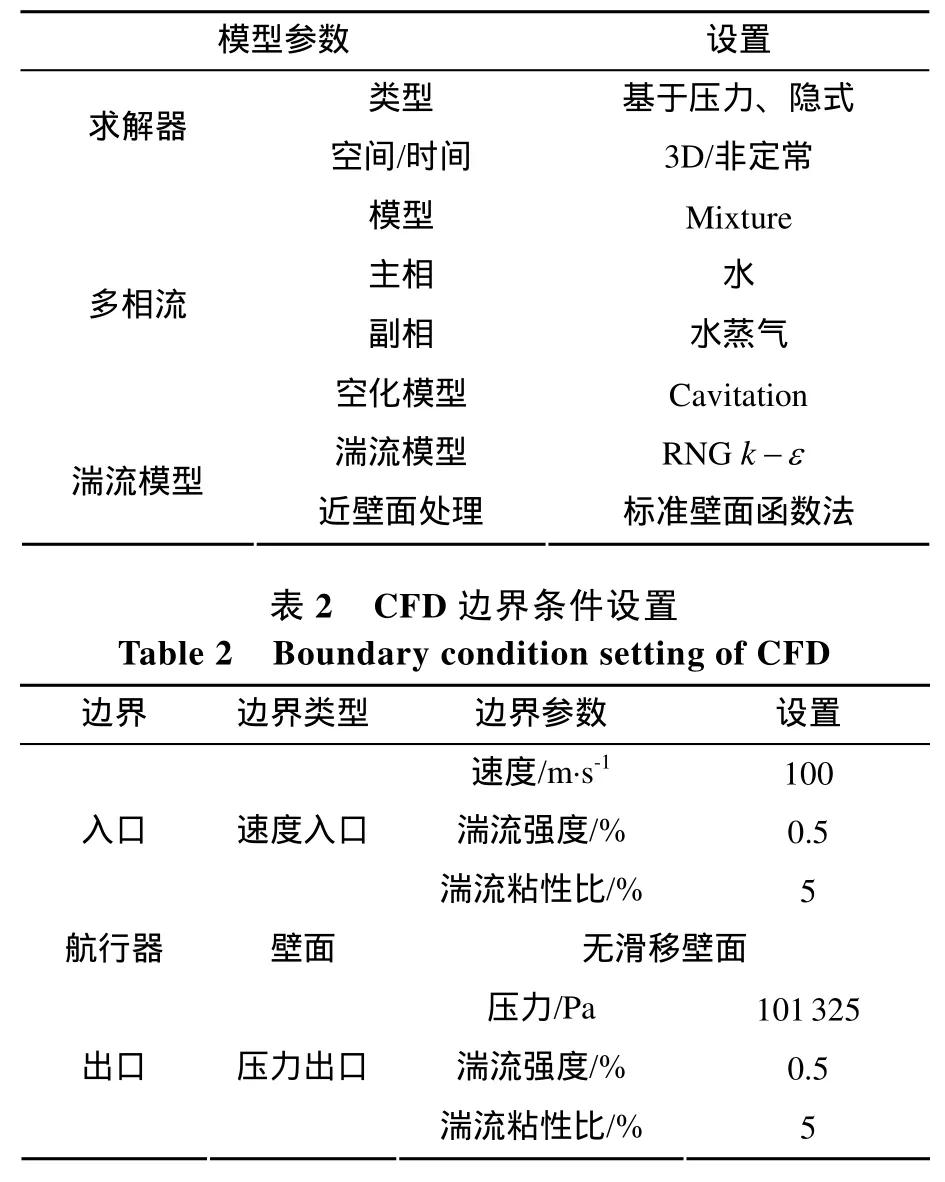
表1 CFD計算模型和參數設置Table 1 Computational model and parameter setting ofcomputational fluid dynamics(CFD)
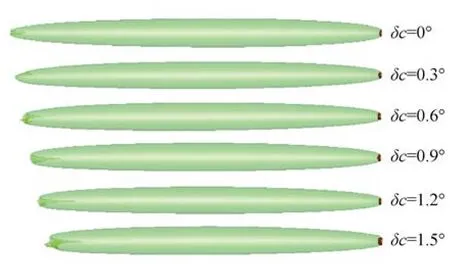
圖7 空化器舵角變化對空泡形態的影響Fig.7 Influence of rudder angle of cavitator on cavity shape
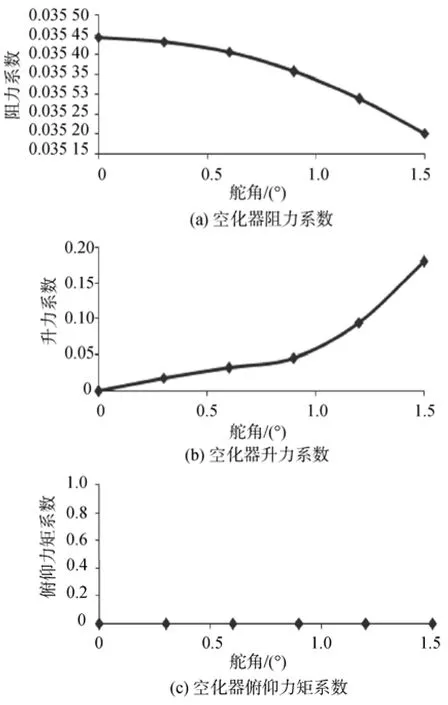
圖8 空化器位置力系數隨舵角變化曲線Fig.8 Curves of position force coefficients of cavitator versus rudder angle
2)航行器位置力
a.空化數對航行器主體空泡的影響仿真
在空化器尺寸一定的前提下,空化數是最能夠影響空泡外形尺寸的參數,通過改變空化數的大小,研究空泡和航行器的位置包絡關系。如圖9所示,為空化數對航行器零攻角下空泡形態的影響仿真。當空化數較大時(圖9 a),形成雙空泡流型,空化器誘導空泡包裹在圓柱段,尾舵和尾端面誘導空泡疊加在一起形成復雜的尾部空泡。隨著空化數的減小,空泡主體在航行器的包裹位置逐步向尾部移動,直至和尾部空泡合為一體。尾舵沾濕面隨著空化數減小,由全沾濕向不同穿刺主體空泡長度過渡。
b.攻角對航行器主體空泡的影響仿真
設定空化器舵角為0,空化數為0.021 17,對應尾舵半穿刺主體空泡(圖9 c),計算航行器在攻角0°~1.5°的空泡形態變化和受力變化。
小攻角變化下,僅造成航行器尾部殼體和尾舵沾濕面的變化,不會影響圓錐段空泡形態,因此只給出攻角變化對航行器尾部殼體和尾舵空泡影響的局部圖,如圖10所示。
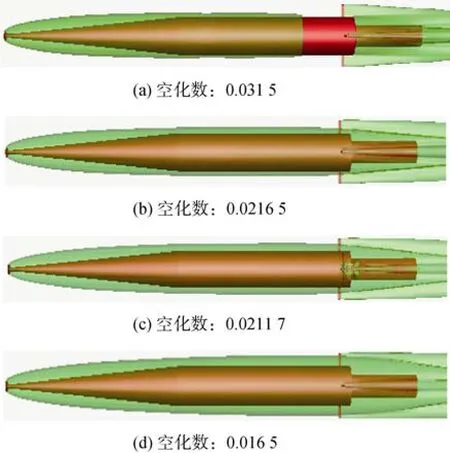
圖9 空化數對航行器空泡的影響Fig.9 Influence of cavitation number on cavity of a vehicle
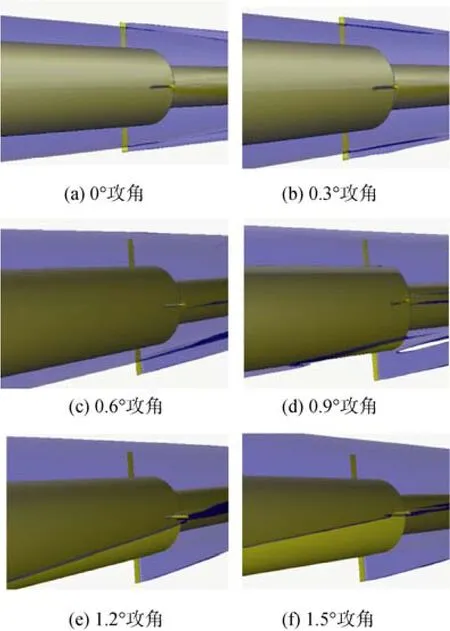
圖10 攻角對航行器尾部空泡形態的影響Fig.10 Influence of attack angle on cavity shape at vehicle stern
隨著攻角的增大,主體空泡由頭至尾向上翹,造成尾部殼體底部沾濕,且沾濕面逐漸增大;造成尾垂直舵穿刺空泡非對稱變化,尾上舵逐漸包裹在空泡內,尾下舵由半沾濕向全沾濕變化。航行器尾端面在0.8°左右攻角出現沾濕,當攻角增大到1.5°左右,尾部端面一半沾濕,尾水平舵將全沾濕。
圖11為航行器位置力系數隨攻角變化的計算值。圖11(a)表示阻力系數變化曲線,隨著攻角增大,航行器尾部沾濕面增大,摩擦阻力增大,阻力系數增大;以0.9°左右的攻角為界,0.9°以內其阻力系數變化不明顯,大于0.9°阻力系數變化較快。圖11(b)和圖11(c)為航行器升力系數和俯仰力矩系數隨攻角變化,0.9°攻角以內升力和俯仰力矩量值幾乎為零,大于0.9°攻角量值迅速增大,表明航行器在空泡內非沾濕狀態下幾乎不產生升力。
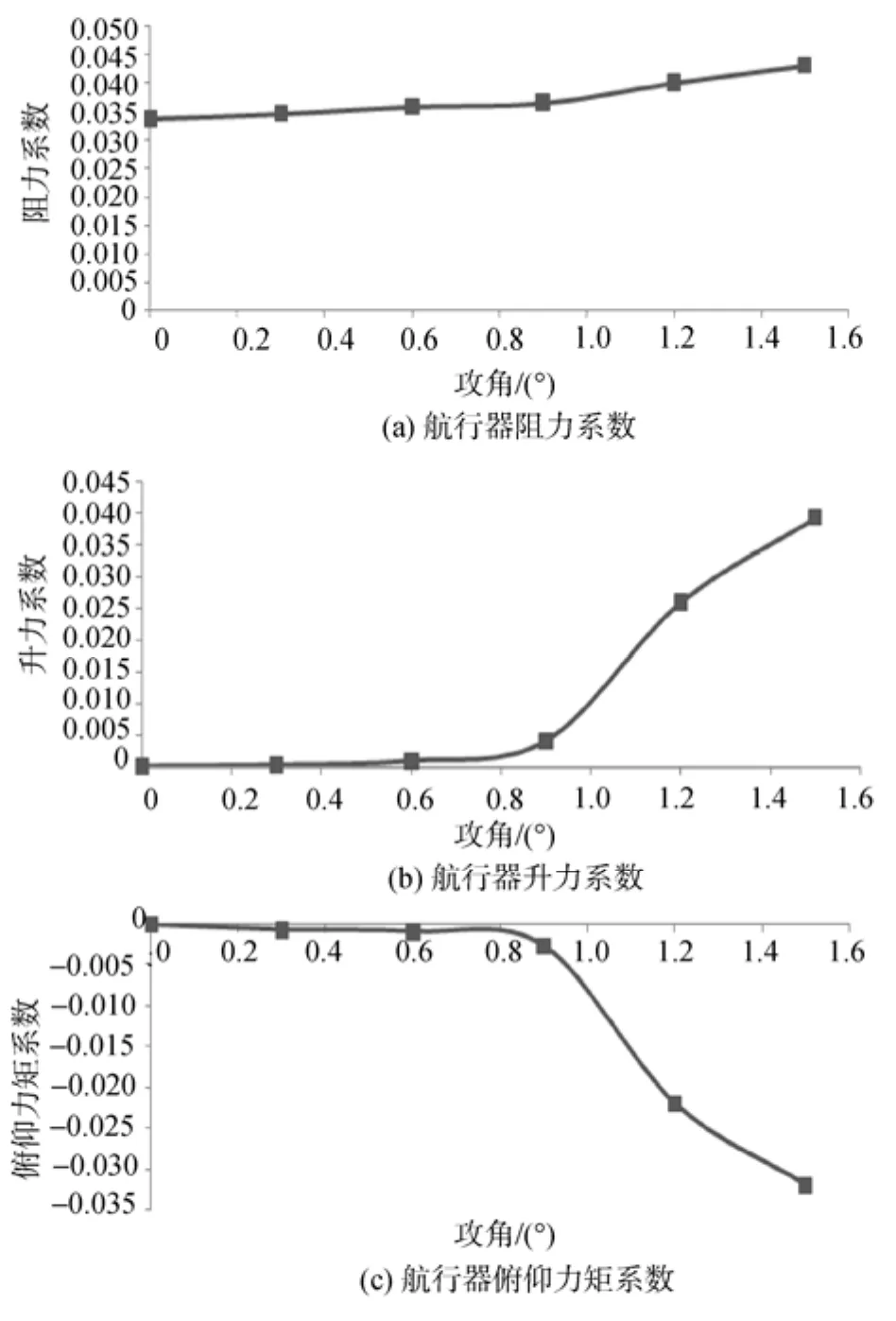
圖11 航行器流體動力系數隨攻角變化曲線Fig.11 Curves of hydrodynamic coefficients of a vehicle versus attack angle
3)尾舵舵效
尾舵舵效與穿刺空泡長度和舵角有關。空泡擾動、空泡泄氣、航行器非定常運動等都將影響尾舵穿刺空泡長度的變化。在此,僅計算定常狀態下,尾舵不同穿刺長度的受力變化和尾舵半穿刺空泡長度下隨舵角改變的受力變化。圖12為尾舵穿刺不同空泡長度的仿真。
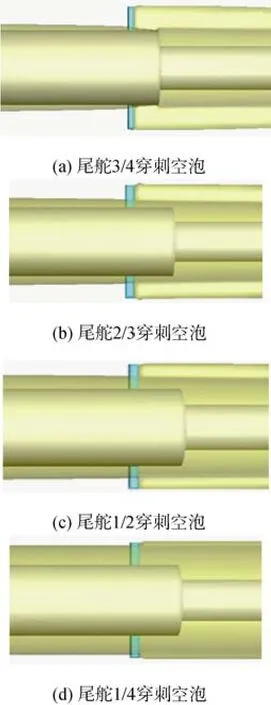
圖12 尾舵穿刺空泡長度變化Fig.12 Length change of tail rudder puncturing cavity
圖13為尾舵阻力系數隨穿刺空泡長度變化的計算值,其數值隨穿刺空泡長度增大而增大,阻力增大的影響因素主要是摩擦阻力增大。由于升力系數和力矩系數量值較小且幾乎不變,故沒有給出二者的計算結果。
圖14為尾舵半穿刺空泡下舵角變化對尾舵受力影響的計算結果,舵角變化范圍為0°~8°,每2°一個工況。由計算結果可以得出,尾舵流體動力系數變化呈分段特征,以4°舵角為界,4°舵角內尾舵的阻力系數隨舵角變化較小,大于4°舵角阻力系數迅速增大;升力系數、力矩系數變化特征和阻力變化趨勢相反,前期變化迅速,后期變化較緩。計算結果給出了楔形翼舵的升力和力矩特性。
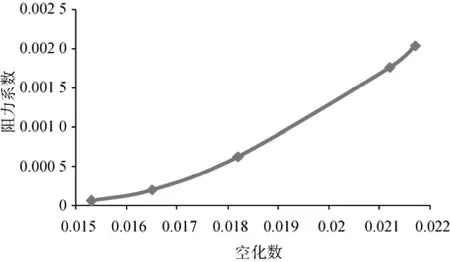
圖13 尾舵阻力系數隨穿刺長度(空化數)的變化曲線Fig.13 Curves of resistance coefficient of tail rudder versus puncturing length(cavitation number)

圖14 尾舵流體動力系數隨舵角變化曲線Fig.14 Curves of hydrodynamic coefficients versus rudder angle
2.3.2阻尼力計算
1)計算參數
模型參數設置同表1和表2。設定線速度為100 m/s,回轉角速度分別為0.2/0.4/0.6/0.8/1.0/ 1.2/1.4 rad/s,對應的回轉半徑分別為500/250/ 166.7/125/100/83.3/71.4 m。
2)阻尼力計算結果
回轉運動流場仿真結果如圖15所示。阻尼力系數隨回轉角速度變化曲線如圖16所示。由計算結果可知,航行器阻尼力系數隨回轉角速度的變化曲線呈非線性,主要是由空泡軸線彎曲造成航行器尾部非對稱沾濕造成的。
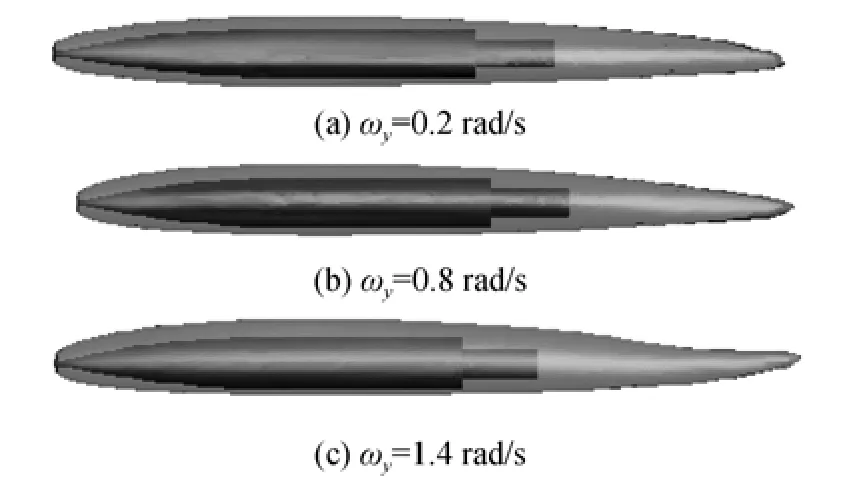
圖15 回轉運動下的空泡形態Fig.15 Cavity shape in rotational motion
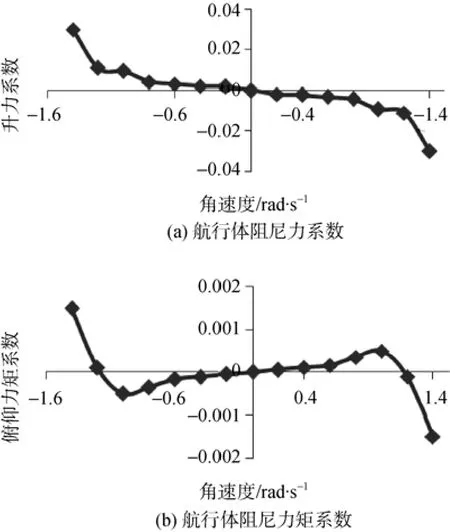
圖16 阻尼力系數隨角速度變化曲線Fig.16 Curves of damping force coefficients versus angle velocity
4 結束語
超空泡航行器的外形、空泡形態、流體動力和運動的一體化耦合計算是超空泡航行器流體動力與總體設計方法的發展方向,國內目前已有一定基礎,在提高計算精度上尚需繼續努力。
文中研究了超空泡航行器的流體動力特性,仿真得到空泡外形的變化規律,基于CFD方法計算了給定模型的流體動力系數,計算方法采用了自然空化模型,計算值需結合通氣空化模型計算結果和模型實驗結果進行修正。文中的研究內容能夠為超空泡航行器動力學建模和彈道計算提供數據參考。
[1]Savchenko Yu N.Supercavitation-Problems and Perspectives[C]//Fourth International Symposium on Cavitation,California Institute of Technology,Pasadena,CA USA.2001.
[2]Semenenko V N.Artificial Supercavitation Physics and Calculation[G]//RTO AVT/VKI Special Course:Supercavitating Flows.Belgium,Rhode-Saint-Genese.:Von Karman Institute for Fluid Dynamics,2001.
[3]Savchenko Y N.Experimental Investigation of Supercavi tating Motion of Bodies[G]//RTO AVT/VKI Special Course:Supercavitating Flows.Belgium,Rhode-Saint-Genese:Von Karman Institute for Fluid Dynamics,2001.
[4]李雨田,張宇文.超空泡航行器機動運動研究[D].西安:西北工業大學,2013.
[5]李雨田,張宇文.空泡外形對超空泡航行器機動回轉運動影響[J].振動與沖擊,2014,33(16):165-170.
Li Yu-tian,Zhang Yu-wen.The Influence of Cavity Shape on Maneuvering Rotational Movement of Supercavitating Vehicle[J].Journal of Vibration and Shock,2014,33(16):165-170.
[6]黃景泉,張宇文.魚雷流體力學[M].西安:西北工業大學出版社,1989.
[7]Vlasenkoz Yu D.Control of Cavity Parameters at Supercavitating Flow[R],AGARD Report,Kiev Ukraine,1997.
[8]Kuklinski R.Experimental Study of Ventilated Cavity on Dynamic Test Model[C]//CAV 2001:Session B3.004.
[9]鄧飛,張宇文.水下超空泡航行器流體動力設計原理研究[J].西北工業大學學報,2004,22(6):806-810.
Deng Fei,Zhang Yu-wen.On Hydrodynamic Design of Underwater Supercavitating High Speed Vehicle[J].Journal of Northwestern Polytechnical University,2004,22(6):806-810.
[10]鄧飛,張宇文,超空化航行器原理試驗模型結構設計[J].機械科學與技術,2005,24(4):434-437.
Deng Fei,Zhang Yu-wen.Design of the Test Model for Ventilated Supercavitating High-speed Underwater Vehicles[J].Mechanlcal Science and Technology,2005,24(4):434-437.
(責任編輯:陳曦)
Calculation of Hydrodynamic Characteristics of Supercavity Vehicle with CFD Method
LI Yu-tian
(The 710 Research Institute,China Shipbuilding Industry Corporation,Yichang 443003,China)
In the mode of supercavitation,the flow field of an underwater vehicle involves three types of media——solid,liquid and gas,and the inter-coupling effect of cavity and vehicle is extremely complicated.In this paper,four typical characteristics of fluid dynamics of a supercavity vehicle,i.e.resistance reduction characteristic,nonlinear,unsteady and uncertain,and smaller fluid inertia force,are summarized,and the nature of fluid dynamics for an underwater vehicle in supercavitation is revealed.The cavity shapes are simulated with the changes of cavitation number,angle of attack,and angle of rudder.The method of computational fluid dynamics(CFD)is used to calculate the forces on a supercavity vehicle with given shape under different conditions.The changes of hydrodynamic characteristics of the vehicle,as well as the relevant influencing factors,are analyzed.
supercavity vehicle;cavity shape;hydrodynamic characteristic;computational fluid dynamics(CFD)
TJ630.1;O353
A
1673-1948(2015)04-0262-07
2015-04-24;
2015-05-28.
李雨田(1981-),男,博士,主要從事水下航行器流體動力研究.
