變結構控制技術在魚雷舵機中的應用
2015-10-24 01:15:34張秦南俊王立文
水下無人系統學報 2015年1期
李 強,張秦南,李 俊王立文
(1. 中國船舶重工集團公司 第705研究所,陜西 西安,710075; 2. 水下信息與控制重點實驗室,陜西 西安,710075)
變結構控制技術在魚雷舵機中的應用
李強1,2,張秦南1,2,李俊1,王立文1,2
(1. 中國船舶重工集團公司 第705研究所,陜西 西安,710075; 2. 水下信息與控制重點實驗室,陜西 西安,710075)
為提高魚雷機動性與舵機控制系統的抗干擾能力,采用滑模變結構控制技術設計魚雷舵機的變結構控制系統,建立了舵機控制數學模型,并以某型魚雷的舵機為例進行了系統仿真。仿真結果表明,與傳統比例-積分-微分(PID)控制技術相比,使用滑模變結構控制方法設計的控制系統響應速度快,超調量小,抗干擾能力強,穩定性更好,該方法能提升舵機控制系統的性能。
魚雷舵機; 滑膜; 變結構控制
0 引言
舵機作為魚雷控制系統的執行機構,為魚雷提供操舵力矩,從而控制雷體的航行姿態。舵機接收來自控制計算機輸出的操舵指令,按要求的控制品質操縱舵軸轉動,驅動舵面偏轉到指定位置,完成對魚雷航行姿態的控制[1]。
傳統直流電機雖然具有良好的調速性能,但由于這類電機具有換向器和電刷等機械接觸部件,工作時容易產生電火花,可靠性較差,同時電機的轉速和輸出功率也受到限制。永磁無刷直流電機的應用很好地解決了這一問題,由于沒有換向器和電刷,可以消除換向火花引起的電磁干擾與電刷和換向器的摩擦力矩,降低了電機的維護成本。此外,無刷直流電機質量輕、體積小、效率高、轉矩/質量比重大、轉動慣量大,具有高轉速、大轉矩與大功率的優點[2]。
經典的魚雷舵機控制理論以比例-積分-微分(proportion integral derivative,PID)控制為代表,它結構簡單,工程上容易實現,受到廣泛的應用。但傳統PID控制系統難以協調快速性和穩定性之間的矛盾,在參數變化和外界干擾時,穩定性較差。
為了改善傳統PID控制的局限,變結構控制理論被引入電機控制領域。變結構控制作為一種現代控制方法,與傳統的PID控制相比較,其控制律更為簡單,可以協調動態與穩態性能,此外,其對參數變化與外界干擾具有不變性,魯棒性強[3]。
基于此,文中選擇變結構控制方法來設計魚雷的舵機控制系統,使用MATLAB/Simulink模塊進行系統建模,仿真結果表明,該控制系統響應速度快,超調量小,抗干擾能力強,穩定性更好[4-6]。
1 魚雷舵機數學模型
魚雷舵機控制電路主要由無刷直流電機、減速器以及反饋電位計組成,魚雷閉環舵機及舵回路結構框圖如圖1所示。
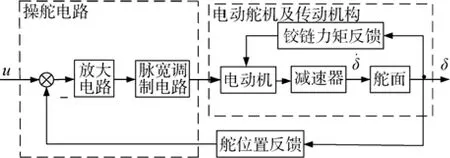
圖1 舵機及舵回路結構框圖Fig. 1 Structure block diagram of steering gear and rudder loop
1.1電機數學建模
電機的電氣原理如圖2所示。
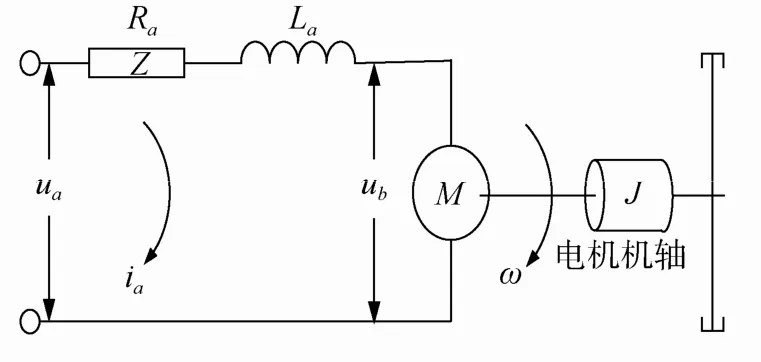
圖2 電動機電氣原理圖Fig. 2 Schematic of motor′s electrical principle
根據圖2所示,電機的轉速由電樞電壓ua控制,由基爾霍夫定理可寫出電路方程

當電樞轉動時,電樞中的感應電壓

根據動量矩定理,電機轉子的力矩方程

式中: J為電機轉動慣量,kg·m2; ua為電樞電壓(操舵指令),V; ub為電機反電動勢,V; Ra為電樞繞組的電阻,?; La為電樞繞組的電感,H; ω表示電機轉速rad/s; λ為粘性摩擦系數,kg·m2·s; Med為額定負載力矩,N·m;Ke指電動機力矩常數,且是反電動勢常數,且
1.2電機仿真模型
考慮到實際電機粘性摩擦較小,建模時不予考慮,于是根據式(1)~式(3)以及電機工作原理可以建立電機的Simulink仿真模型如圖3所示。
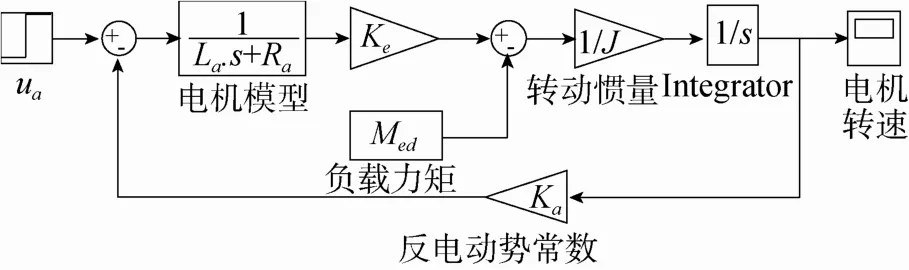
圖3 魚雷舵機仿真模型Fig. 3 Simulation model of torpedo steering gear
2 變結構控制律推導
由變結構控制理論可知,變結構控制系統的關鍵在于設計變結構控制律使系統狀態沿著狀態空間中的滑動模態趨向原點[7]。
考慮到舵機系統實際上是一個位置跟隨器,要求系統輸出位置跟蹤輸入位置,因此可選取系統的誤差信號e及其1階導數e.作為狀態變量

電機的狀態方程為

式中: K為電機傳遞系數;f為系統干擾項。
設系統的滑動模態方程為

式中,c為滑動模態參數,對式(7)兩邊求導,并將式(6)代入得

變結構控制系統的能達條件(滑動模態存在)

則有

選取適當的滑動模態參數c,使得

如此,式(10)中左邊第2項恒小于零,于是滑動模態存在條件可寫為

根據以上公式可以推導出電動舵機系統的變結構控制律

至此,推導出的滑模變結構控制律

分析式(13)可知,電機啟動需要1個大的啟動電壓,當舵機系統位置誤差x1減小到一定程度時,控制u將落入死區,給系統帶來靜態誤差,而且降低了系統的抗干擾能力,電機的快速性得不到充分發揮,在電路實現上也有一定的困難。
基于此,需要簡化式(13)所示的變結構控制律。假設電機的額定輸入電壓為±U,由于舵面存在機械限位,因此舵機系統的最大狀態誤差max(|x1|)是存在的。考慮最極端情況下,取max(|x1|)為正機械限位角與負機械限位角之差。于是,總存在一個滑動模態參數c,使得對于任意的x1,下式均成立

因此,式(13)的變結構控制律可以簡化為

由式(18)可以知道,舵機狀態變化時,電機始終在額定電壓下運轉,這樣處理可以消除死區的影響,提高系統精度,充分發揮系統的快速性,提高舵機的抗干擾性,也為硬件電路的設計帶來方便。
使用變結構控制律設計的舵機控制系統在提升系統快速性、穩定性與抗干擾性的同時也會帶來系統的高頻抖振[8]。這里在系統仿真中加入一個小的線性區來消除抖振,線性區的范圍由舵機快速性的要求確定。
滑動模態參數c的選取需要綜合考慮各種因素,c的絕對值越大,系統收斂性越快,但由于電機轉速有限,c取值過大會使初始狀態進入滑動模態所需時間變長[9]。這里綜合考慮選取使調整時間短、超調量小的c值作為系統的滑動模態參數值,實際使用中需根據不同電機情況進行c值的選取。
3 系統仿真
加入變結構控制律后,變結構控制系統的仿真原理見圖4。
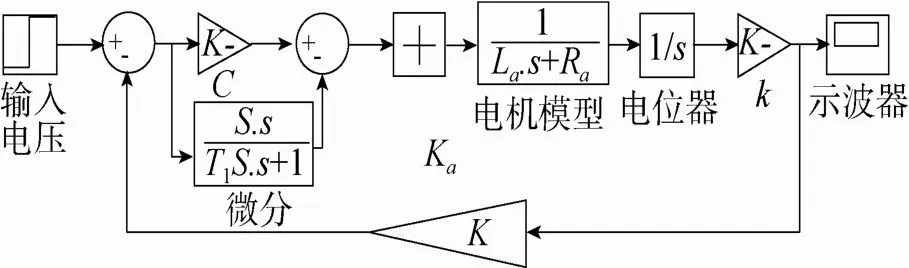
圖4 魚雷舵機系統仿真原理圖Fig. 4 Simulation schematic of torpedo steering gear system
3.1模型驗證
首先對所建模型在空載狀態和額定負載狀態下進行了仿真,仿真過程中,設定操舵指令電壓為38 V,采樣時間為1 ms,2種狀態下的仿真結果分別如圖5和圖6所示。
仿真結果表明,電機空載轉速為3 611 r/min,額定負載下轉速為3 159 r/min,符合某型魚雷電機轉速指標。
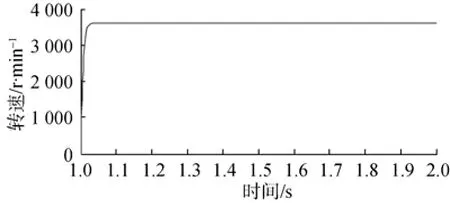
圖5 空載電機轉速仿真曲線Fig. 5 Simulation curve of motor speed without load
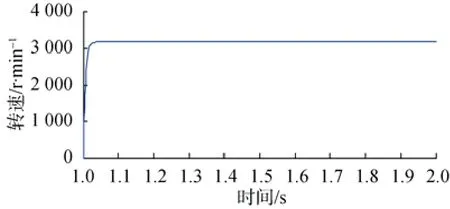
圖6 額定負載下電機轉速仿真曲線Fig. 6 Simulation curve of motor speed with rated load
假設使電機舵角輸出為4°,分別對PID控制系統與變結構控制系統進行仿真,結果如圖7和表8。仿真結果表明,使用變結構控制的系統響應速度快,舵角輸出誤差小。
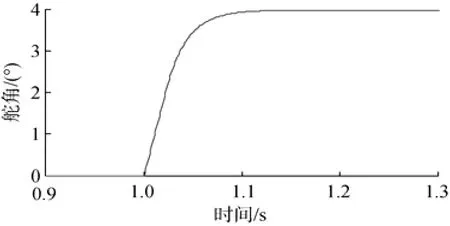
圖7 比例-積分-微分(PID)控制系統舵角為4°時的輸出曲線Fig. 7 Output curve of proportion-integral-differen-tiation(PID)control system when rudder angle is 4°
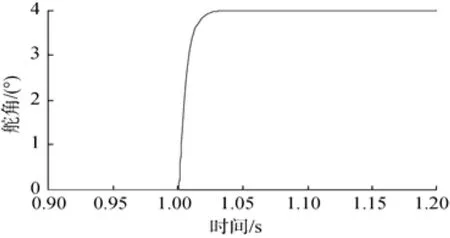
圖8 變結構控制系統舵角為4°時的輸出曲線Fig. 8 Output curve of variable structure control system when rudder angle is 4°
為比較傳統PID控制系統與變結構控制系統的抗干擾性,在系統中加入5 V的隨機白噪聲干擾項,觀察舵角的輸出曲線參見圖9和圖10。
仿真結果表明,變結構控制系統抗干擾能力強,系統更穩定。
4 結束語
該文采用滑模變結構控制方法設計了魚雷舵機控制系統,針對某型魚雷的舵機進行了系統仿真分析。通過與傳統PID控制系統的比較,結果表明,使用滑模變結構方法控制的系統響應速度快,超調量小,抗干擾能力強,穩定性更好。
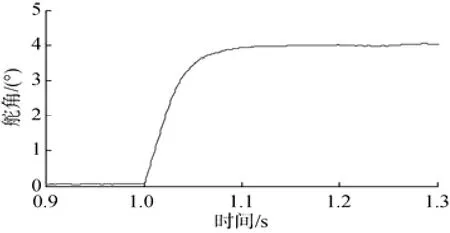
圖9 噪聲條件下PID控制系統舵角輸出曲線Fig. 9 Rudder angle output curve of PID control system with noise
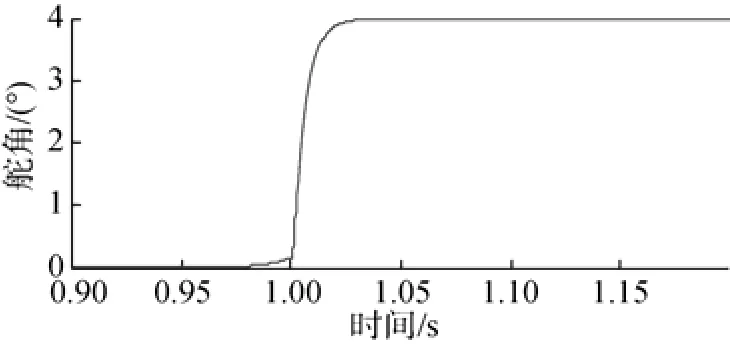
圖10 噪聲條件下變結構控制系統舵角輸出曲線Fig. 10 Rudder angle output curve of variable structure control system with noise
[1]徐德民. 魚雷自動控制系統[M]. 西安: 西北工業大學出版社,2001.
[2]劉剛,王志強,房建成. 無刷直流電機控制與應用[M].北京: 機械工業出版社,2008.
[3]周軍. 變結構控制理論在電動舵機系統設計中的應用[J]. 西北工業大學學報,l 990,8(3): 273-280.
[4]蔣繼軍. 魚雷仿真技術[M]. 北京: 國防工業出版社,2013.
[5]劉金琨. 滑模變結構控制MATLAB仿真[M]. 北京: 清華大學出版社,2012.
[6]王江,付文利. 基于MATLAB/Simulimk系統仿真權威指南[M]. 北京: 機械工業出版社,2013.
[7]高為炳. 變結構控制理論及設計方法[M]. 北京: 科學出版社,1996.
[8]吝龍艷,張秦南,高劍. 變速魚雷自適應滑模控制研究[C]//2012年魚雷制導技術學術研討會論文集. 長春:2012.
[9]湛勝華. 舵機伺服控制系統研究與設計[D]. 重慶: 重慶大學,2007.
(責任編輯: 楊力軍)
Application of Variable Structure Control Technology to Torpedo Steering Gear
LI Qiang1,2,ZHANG Qin-nan1,2,LI Jun1,WANG Li-wen1,2
(1. The 705 Research Institute,China Shipbuilding Industry Corporation,Xi′an 710075,China; 2. Science and Technology on Underwater Information and Control Laboratory,Xi′an 710075,China)
To improve the maneuverability of a torpedo and anti-interference capability of the steering gear control system,a variable structure control system of torpedo steering gear is designed with the sliding mode variable structure control technology,and a steering gear control model is established. System simulation is carried out for a certain type of torpedo,and the results show that this control system using sliding mode variable structure achieves faster response speed,smaller overshoot,stronger anti-interference capability,and better stability compared with the conventional proportion-integration-differentiation(PID)control method,and this design method can improve the performance of torpedo steering gear control system.
torpedo steering gear; sliding mode; variable structure control
TJ630.33
A
1673-1948(2015)01-0040-04
2014-11-20;
2014-12-22.
李強(1990-),男,在讀碩士,主要研究方向為武器系統與運用工程.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00