單純小客車為主的雙車道公路交通流特性調查分析
2015-10-21 17:46:51范偉康韓寶睿
森林工程 2015年4期
范偉康 韓寶睿


摘要:單純以小客車為主的雙車道公路是雙車道公路較為特殊的一種情形,對其交通流特性及其影響因素進行具體的描述。通過選定具有代表性的調查地點,實地進行交通量、地點速度、車頭時距等參數的調查,采集交通流數據,使用數理統計等方法進行數據分析,得到不同道路參數條件下的交通流參數特征及影響因素,從而能夠為城市雙車道公路的設計、建設以及交通管理與控制提供一定的參考依據。
關鍵詞:交通流;雙車道公路;交通調查;小客車
中圖分類號:S713;U49
文獻標識碼:A
文章編號:1001-005X(2015)04-0134-06
單純以小客車為主的雙車道公路較為少見,國內外對其研究也相對缺乏,而南京市紫金山龍脖子路為此類交通提供了較好的樣本,從線形、交通組成、區位等方面均具備很好的代表性。本文通過對其交通流特性進行分析,得出此類道路的運行規律,為城市雙車道公路的交通管控及設計提供一定的依據,有助于緩解城市交通擁擠和城市的交通集約化。且此類公路由于是以小客車為主,無需考慮車輛折減系數,便于和規范做參照對比。
1 交通流數據調查
1.1 數據采集的地點和時間
1.1.1 選取數據觀測點
龍脖子路橫穿紫金山,西起太平門,東至中山植物園,途徑紫金山索道,由太平門路和植物園路構成,是一條雙向雙車道公路,道路基本寬度約5.5m。其不僅是進入中山陵景區的要道,也是南京東城區和西城區的主要通勤要道,全線交通流主要由小客車組成。此外,龍脖子路依山而建,全程分布多條曲線,最小轉彎半徑約為125m,對于選取不同線形的觀測地點較為有利。路段如圖1所示。
觀測點1:直線段。選取的直線段坡度較小,近似認為平直路,作為其他路段對比的參照對象。該觀測點近太平門起點處,道路總寬5.5m,兩側側向凈寬均為0.3m,單車道寬2.5m。
觀測點2:平曲線段。選取的觀測點近紫金山索道,道路總寬6.2m,外側向凈寬0.5m,內側向凈寬0.3m,車道寬2.8m,外側車道轉彎半徑約125m,內側車道轉彎半徑約120m。
觀測點3:斜坡段。選取的路段位于琵琶湖景區入口處,道路總寬5.8m,兩側側向凈寬均為0.3m,單車道寬2.6m,坡度5%~6%。
1.1.2 數據采集的時間
龍脖子路為南京城西與城東的通勤要道,具備通勤特性,數據采集以早晚高峰小時段為宜。選取晚高峰小時(17: 00~18: 00)作為數據采集時間,并主要進行5次調查。
1.2 調查方法
(1)交通量調查。本次交通量調查主要采用人工調查法。安排調查人員在選取的觀測點按調查方案每隔5min分方向計數,觀測1h,每個地點共觀測24組數據。
(2)車速調查。本次車速調查主要針對地點車速,采用人工調查法與雷達測速儀法,并將兩種方法采集到的數據相互補充。
人工調查法是在調查的路段上選取一段很短的距離l(本次調查取15m),然后實測車輛通過該距離所需的時間t(s)值,用公式(1)計算速度值。
使用雷達測速儀時需注意隱蔽,避免人群圍觀及駕駛員的警惕心理以保證所測數據的真實性。測量時應盡量保證雷達槍正對來車以減少測量誤差,正對有困難時,應使雷達槍與車輛運行之間的夾角盡可能小。
(3)車頭時距調查。對約束車流觀測點每個方向連續觀測7輛車,得到6個車頭時距值;對非約束車流觀測點每個方向連續觀測51輛車,得到50個車頭時距值。
2 數據處理
2.1 交通量
對各觀測點得到的交通量數據進行整理,以直線段為例,部分數據整理見表l。由于交通量主要是小客車,無需分車型。
2.2 地點車速
地點車速是指某個特定車輛或車輛在某個特定地點的瞬時車速。按照人工測量法,由公式(1)計算得出車輛的地點車速,并以雷達測速儀所測數據補充,整理可得各觀測點車速頻率分布表。以直線段為例見表2。
2.3 車頭時距
2.3.1 約束車流
車頭時距是指相鄰車輛的車頭經過同一斷面的時間差。約束流下,交通量較大,車輛處于跟馳狀態,車頭時距在某一數值左右變化。部分約束車流各方向的車頭時距的測量結果整理見表3。
2.3.2 非約束車流
非約束車流是指處于跟馳狀態與自由狀態間轉換的交通流。對車頭時距數據進行整理后,得到觀測點各方向的車頭時距頻率分布表,以直線段為例見表4。
3 交通參數特征分析
3.1 交通量特性分析
根據道路特性,本文主要對高峰小時交通量進行分析,并通過高峰小時流量比和高峰小時系數描述其特征。圖2是在高峰小時期間每5min的交通量隨時間和空間的分布曲線圖。
3.1.1 時間分布特性
高峰時段,不同路段同方向的交通量隨時間的分布大致相同,表明此類道路的幾何參數對交通量的時間分布特性影響較小。對各觀測點各方向的高峰小時系數(PHF)根據公式(2)進行計算,結果見表5。
由表5可見,高峰小時系數隨交通流方向和地點的不同而變化,且主要分布在0.8~0.95之間,表明高峰小時流量有較大的可變性。
3.1.2 空間分布特性
交通量的方向分布特性以不均勻系數來描述,根據公式(3)計算各觀測點各方向的方向不均勻系數D,結果見表6。
式中:D為方向不均勻系數,%;q為單向小時交通量,輛/h;Q為雙向小時交通量,輛/h。
由表6可見,各觀測點不同方向上的交通量分布有一定差異,表現出一定的方向特性。且各方向的交通量分布隨觀測點的變化相對較小,表明道路參數對交通量空間分布特性影響較小。
3.2 速度特性分析
將地點車速數據整理可得速度頻率分布表,數據處理如下。
3.2.1 計算時間平均車速
計算得到各觀測點處的時間平均車速見表7。
由表7可見,大部分車輛均以低于40km/h車速行駛,公路線形對車速有較大影響,且具有較為明顯的方向分布特眭。直線段與斜坡段雙向分布較為常規,而曲線段內側路段速度與外側相比波動較大。其原因是,曲線段內側設置了公交站點,公交車輛的停靠出現的減速、停車、啟動對路段車速有較大的影響。
3.2.2 速度頻率分布曲線
繪制速度頻率分布曲線,以直線段為例,結果如圖3所示。
由圖3可見,各觀測點的車速頻率分布曲線趨勢大致相似,但各方向的曲線峰值大小及時刻不同。計算各段車速均方差,以說明原始數據的離散程度,結果見表8。
由表8可見,直線段雙向車輛選擇速度的自由度均比較大;曲線路段內側的地點車速方差遠大于外側,表明內側方向的車輛地點車速離散程度比外側大,與經驗值不符。其原因仍是公交車輛的出現導致了,車輛的減速,甚至停車,因而出現車速差異較大情況。
3.2.3 累計頻率分布曲線
繪制速度累計頻率分布曲線,以直線段為例,如圖4所示。計算15%、50%和85%所對應的百分位車速,見表9。
15%位車速常用作最低限速;50%位車速又稱為中位車速,受兩端車速值的影響,較平均車速小;85%位車速可用作最高限速。表9數據可作為單純小客車為主的雙車道公路各路段各方向的限速參考。
3.3 車頭時距特性分析
3.3.1 約束車流
計算約束流下各觀測點平均車頭時距,見表10。
由表10數據可見,跟馳狀態下,平均車頭時距分布在1~3s之間,且同一方向不同路段處的平均車頭時距不同,同一路段不同方向的車頭時距也不相同。
3.3.2 非約束車流
(1)車頭時距分布散點圖。繪制各觀測點各方向的車頭時距散點分布圖,如圖5所示。
由圖5可見,觀測道路不同線形、不同方向處的車流狀態均呈現車隊波的狀態,且車隊長度并不固定,若以5s為界定義車隊,則最大車隊長度可達18輛/隊,最小車隊長度為3輛/隊。此時,斜坡段的車隊的長度較直線與曲線段長,車隊波的數量較直線段與曲線段少。
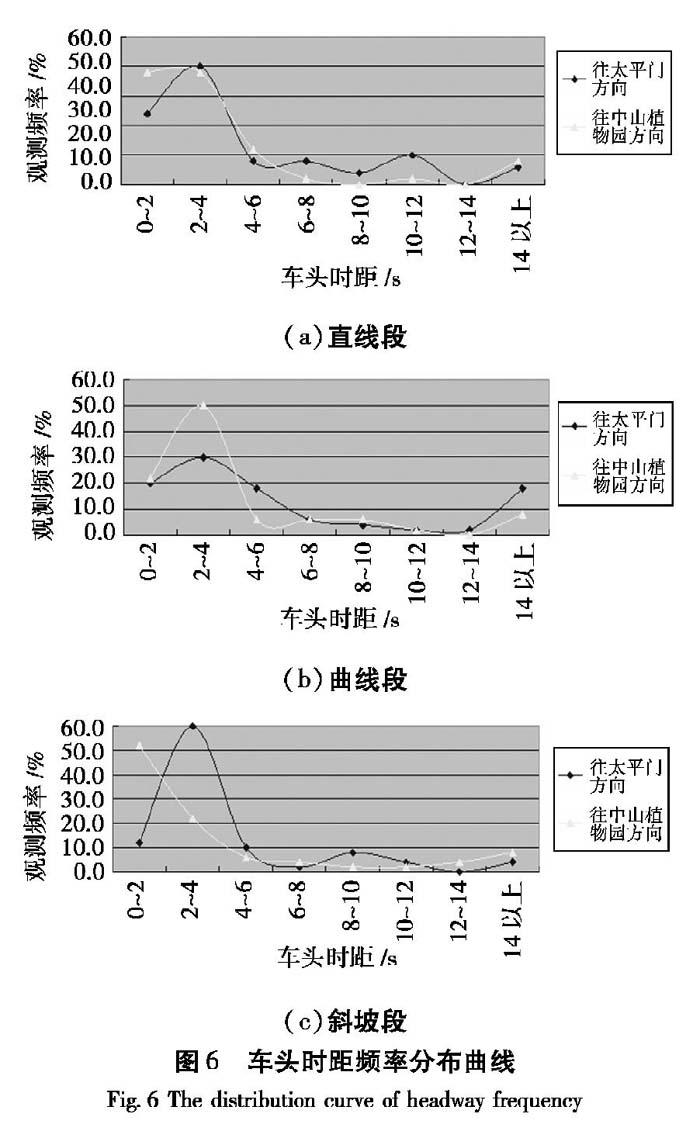
(2)車頭時距頻率分布曲線。根據數據整理可得車頭時距頻率分布表,繪制各觀測點處的車頭時距頻率分布曲線,如圖6所示。
由圖6可見,車頭時距是成簇的,即一段時間內連續幾輛車的車頭時距圍繞一個較小的值上下變動,繼而出現1-2個較大值。直線段車頭時距主要分布在0~4s;曲線段內側的車頭時距主要分布在2~4s,外側主要分布在2~4s及14s以上;斜坡段上坡的車頭時距主要分布在2~4s,下坡主要分布在0~2s,符合斜坡路段上下坡的速度特性。
(3)車頭時距分布擬合。本文用負指數函數、愛爾朗函數等常用分布模型對車頭時距概率分布曲線進行擬合,以負指數分布為例,擬合結果如圖7所示。
由圖7可見,各段的車頭時距觀測點在擬合曲線上下波動,部分路段、方向擬合較好,而部分路段、方向偏離較大,車頭時距頻率分布曲線并不完全符合負指數。此外,本文對愛爾朗分布模型亦做了相關擬合,效果不佳,因而不再贅述,其可能服從其他分布。
4 結束語
根據對單純小客車為主的雙車道公路的交通流分析,可得如下幾點結論:
(1)交通量受道路線性影響較小,高峰小時流量有較大的可變性,且存在一定的方向特性。
(2)地點車速受道路線型影響較大,且當有公交車等大車混入時對車隊速度有較為明顯的影響。
(3)車頭時距分布具備時間和空間特性,約束流車頭時距相對集中,而非約束流一般成簇狀。且道路線型及方向對車隊波的影響較大,分布模型較為獨特,常用分布模型無法較好的表達。
(4)約束流下,道路線型及交通流方向對通行能力影響較大。
本文對單純小客車為主的雙車道公路的交通流特性進行了調查與分析,針對不同路段的交通量、地點車速和車頭時距這三個交通流參數進行了研究。在此基礎上,可建立影響自由流速度的仿真模型,線型變化對車速的影響,也可對平均速度、密度及車頭間距等參數進行研究,分析其特性。進一步對交通流參數之間的關系進行分析研究,為此類道路的規劃設計和管理提供理論依據。