波浪補償絞車穩態和動態特性的試驗研究
2015-10-16 19:04:08崔戈
機電設備 2015年3期
關鍵詞:系統
崔 戈
(海軍裝備部,北京 100841)
波浪補償絞車穩態和動態特性的試驗研究
崔 戈
(海軍裝備部,北京 100841)
在海上施工、科研考察和海洋平臺等領域中廣泛運用波浪補償絞車技術。本文介紹了一種波浪補償絞車組成、工作原理及試驗方案。通過試驗,分析了波浪補償絞車開環和閉環控制下的穩態和動態特性,運用頻率分析儀對波浪補償絞車機、電、液系統的開環和閉環系統進行系統辨識,掌握了波浪補償絞車機電液系統的近似傳遞函數。最后提出了試驗應該注意的事項,以為工程實際提供試驗研究和分析手段。
波浪補償絞車;穩態特性;動態特性;掃頻;系統辨識
0 引言
波浪補償技術是在海上作業時,為減少海水波浪運動對作業任務的影響而采取的技術手段。為保障海上作業時人身和物資的安全,在海上施工、科研考察和海洋平臺等領域中廣泛運用波浪補償技術[1]。在實際工程應用中,波浪補償絞車經常使用電液伺服速度控制系統對海浪進行速度隨動控制來提高系統的剛度和減小伺服閥等參數變化的影響,并提高系統精度[2]。
本文通過在開環和閉環控制策略下對波浪補償絞車系統的穩態和動態特性進行研究,分析了電液絞車開環和閉環控制下的穩態和動態特性,通過頻率分析儀進行了電液絞車開環和閉環系統的辨識,掌握系統的真實數學模型。最后得出波浪補償絞車滿足 5級海況下波浪補償絞車0.33 Hz隨動控制系統要求的結論,并提出試驗中的注意事項及今后需開展的研究。
1 波浪補償絞車被試設備組成及工作原理
波浪補償絞車被試設備包括電控系統、波浪補償絞車、負載絞車、帶有編碼器的導向滑輪、鋼絲繩、固定架及附件組成等組成,如圖1所示。其中負載絞車可模擬被補償設備的張力加載設定,電控系統為波浪補償絞車及負載絞車提供控制信號,編碼器為測試系統提供反饋信號。
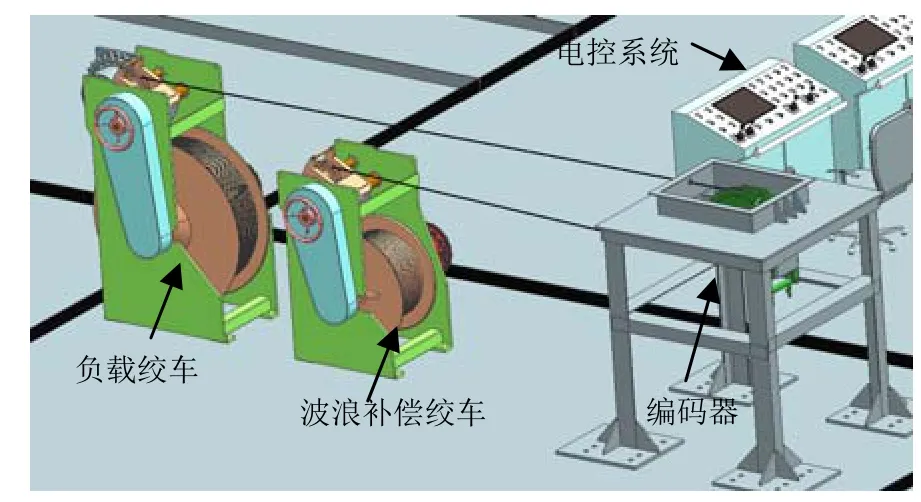
圖1 波浪補償絞車被試設備組成
波浪補償電液絞車系統為泵控閉式系統,其傳動效率高,設備重量輕,結構緊湊,可減少設備的驅動功率,常用于船舶設備和工程機械等移動式設備或傳遞功率較大的場合。圖2為波浪補償絞車液壓原理圖。它由伺服泵、控制泵、補油泵、低速大扭矩馬達、絞車及編碼器等組成,伺服泵集成了沖洗組件,并為低速大扭矩馬達和絞車提供足夠的壓力及調速需求,控制泵為伺服泵變量機構提供控制油,補油泵為閉式系統提供補油流量,絞車可通過鋼絲繩連接需要被補償設備,編碼器為控制系統提供反饋信號。
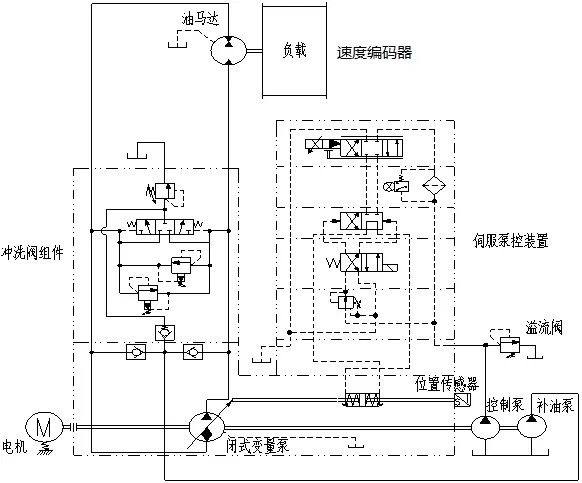
圖2 波浪補償絞車液壓系統原理圖
2 試驗方案
試驗中使用φ10mm的鋼絲繩依次纏繞于波浪補償絞車、帶有編碼器的導向滑輪、負載絞車并構成物理閉環,如圖1所示。并使用屏蔽電纜將防松裝置的編碼器與電控系統連接。以下試驗均在波浪補償絞車和負載絞車聯動控制的基礎上進行試驗。
波浪補償絞車穩態特性測試采用信號發生器+示波器的方法,動態特性測試采用頻率特性分析儀(集成信號發生器)進行測試,測試系統組成如圖3所示。

圖3 測試系統組成
動態特性測試采用正弦掃頻來模擬絞車的真實使用環境,充分驗證結構和產品的設計缺陷,并檢驗結構和產品的安全性、可靠性[3],能更加準確地指導設計過程,提出寶貴的設計修改意見。相關電信號及設備連接方案如圖4所示。

圖4 連接方案
3 波浪補償絞車開環和閉環控制穩態特性試驗
3.1 開環控制穩態特性試驗
波浪補償絞車速度開環控制穩態特性試驗是在鋼絲繩張力為1t條件下進行的測試。為抵消負載力引起的零偏,波浪補償絞車控制系統輸入信號側加入0.48V偏置信號。另外,通過反復對比不同反饋增益對系統穩態特性的影響,確定電控系統PLC中波浪補償絞車速度信號反饋增益為64時,絞車穩態特性最好。
采用信號發生器控制輸入三角波電壓信號(幅值:±10V,頻率:0.02Hz),進行一完整循環掃描給出輸出量和輸入量關系的連續曲線[4],得到系統輸入、輸出曲線,如圖5所示。
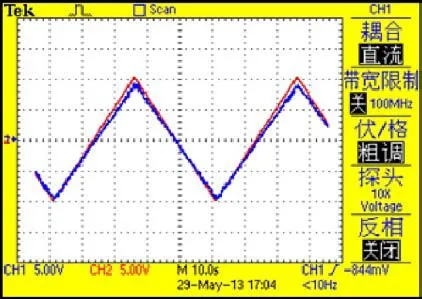
圖5 開環系統穩態控制特性測試曲線
由圖5可看出,由于馬達和油泵在負載絞車1t恒張力的條件下泄漏量增大,波浪補償絞車在輸入指令大于0時,速度輸出信號1小于指令輸入信號2對應的絕對速度;而在輸入指令小于 0時,速度輸出信號信號大于指令輸入信號2對應的絕對速度。
圖6為開環系統誤差分析。可看出,系統速度誤差值最大處發生在正向波峰時,為+2V,由此可得出開環控制系統的速度誤差最大值為20%左右。
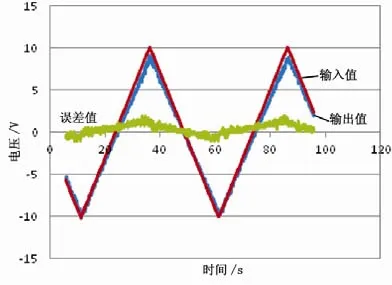
圖6 開環系統誤差分析
由以上數據分析,可得到波浪補償絞車系統在開環速度控制狀態下的穩態特性曲線如圖7所示。

圖7 開環穩態特性曲線
3.2 閉環控制穩態特性試驗
根據被控對象的固有特性,閉環控制采用了PI控制算法。通過試驗,整定后KP=0.7;TI=0.27s。
采用同3.1中相同的信號進行一完整循環掃描給出的輸出量和輸入量關系的連續曲線,得到系統輸入、輸出曲線如圖8所示。可看出,由于馬達和油泵在負載絞車1t恒張力的條件下,輸出值跟隨輸入值曲線較開環的跟隨曲線好,從而證明了閉環速度控制系統對系統泄漏、溫度、外負載等并不敏感。
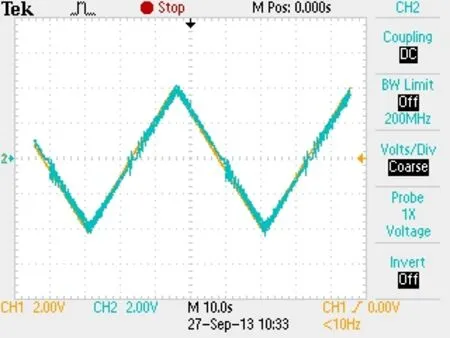
圖8 閉環系統穩態控制特性測試曲線
由于測試條件限制,當時只測試了±4V的穩態特性曲線,其誤差分析結果如圖9所示,其誤差最大出現在0V左右,即運動速度接近0時,其控制誤差較大,但誤差絕對值均未超過0.72V,由此可得出閉環控制系統的速度誤差最大值為7.2%。
由以上數據分析,可得到波浪補償絞車系統在閉環速度控制狀態下的穩態特性曲線如圖10所示。
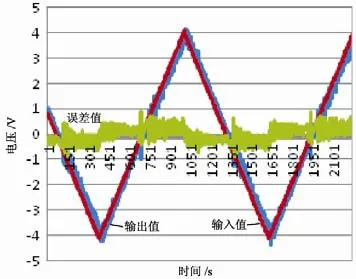
圖9 閉環系統誤差分析
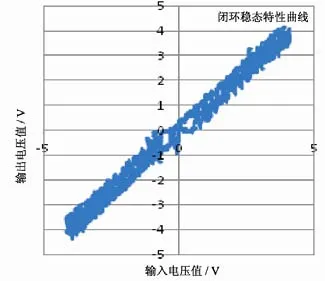
圖10 閉環穩態特性曲線
3.3 開環和閉環控制穩態特性對比
為具有可比性,將開環控制系統±4V內測試的誤差數據和閉環系統±4V內測試的誤差數據進行對比分析,如圖11、12所示,在±4V的測試范圍內,速度閉環控制誤差最大值均發生在 0V(即速度為零)附近為0.72V;而開環速度控制誤差當輸入電壓由-4V~+4V或+4V~-4V變化時,速度誤差最大值發生在±4V(速度最大)附近,實際采集的速度輸出電壓分別為1.2、0.8V。
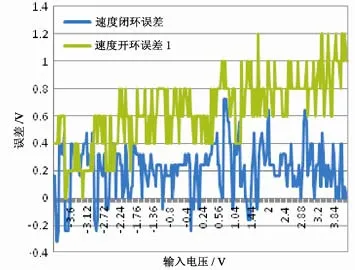
圖11 速度由-4V~+4V變化時速度誤差曲線
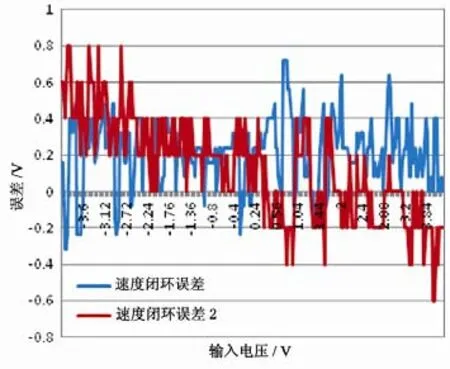
圖12 速度由+4V~-4V變化時速度誤差曲線
結合圖6、9開環和閉環系統誤差分析,可推斷開環系統的最大誤差為2V,速度控制誤差20%。而閉環速度控制系統的速度為0.72V,速度控制誤差為7.2%,且閉環速度控制不受電壓變化趨勢的影響。
將波浪補償絞車在開環和閉環控制狀態下測試的穩態特性曲線比較,由圖13可看出,閉環控制系統的穩態特性與理想穩態特性曲線更吻合,而且滯環、線性度等穩態特性指標較開環控制系統優勢明顯。
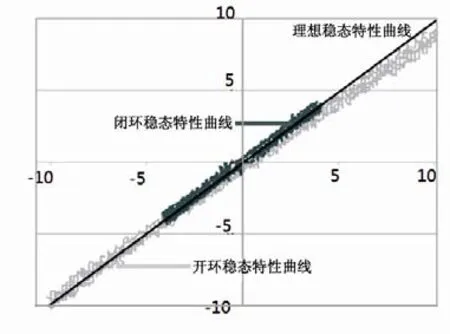
圖13 開環閉環穩態特性對比
4 波浪補償絞車開環和閉環控制動態特性試驗
在負載絞車工作中恒張力(1t)狀態下,將信號分析儀與系統按照圖5連接,由于考慮到試驗的安全性,在試驗過程中幅值確定為6V,開環和閉環掃頻范圍0.05Hz~0.5Hz,開始測量控制系統的動態響應特性,并通過頻率分析儀對開環和閉環控制系統進行系統辨識,得到5階數學模型。
由于所用測試線具有10倍衰減特性,因此測試出的開環系統的幅頻特性曲線在Bode圖中的零分貝線為-20dB線,而閉環系統的測試不受測試線衰減特性的影響。
4.1 開環控制動態特性試驗
在上述條件下,開環控制動態響應測試出系統的Bode圖如圖14所示。可看出,波浪補償絞車系統在6V幅值下的幅頻寬、相頻寬分別>0.5Hz。滿足5級海況下波浪補償絞車0.33Hz隨動控制系統要求。
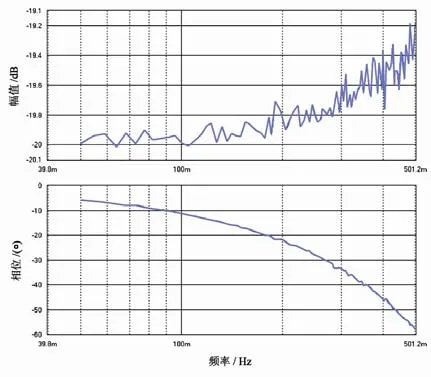
圖14 速度開環控制系統實測Bode圖
通過實測開環速度控制系統曲線,可擬合得到波浪補償系統開環系統的近似5階傳遞函數如下:

該模型能在0Hz~0.5Hz內較好反映實測幅值和相位Bode圖曲線,通過將傳遞函數導入Matlab-Simulink工具包中仿真后可知,該傳遞函數并不穩定,因此該模型僅可反映0Hz~0.5Hz內系統的幅相頻特性。
4.2 閉環控制動態特性試驗
在負載絞車工作中恒張力(1t)狀態下,將頻率分析儀與系統連接后,通過分析儀自動輸入系統 0.05Hz~0.5Hz的頻率信號,開始測量分析系統在6V幅值下的速度閉環控制響應特性,如圖15所示。波浪補償絞車速度閉環控制系統在 6V輸入下的幅頻和相頻截止頻率均大于0.35Hz,滿足波浪補償絞車0.33Hz隨動控制系統要求。
通過實測閉環速度控制系統曲線,可擬合得到波浪補償絞車閉環系統的近似 5階傳遞函數,其傳遞函數形式如下:
該模型能在0Hz~0.4Hz內可較好反映實測幅值和相位Bode圖曲線,通過將傳遞函數導入Matlab-Simulink工具包中仿真后可知,該傳遞函數并不穩定,因此該模型僅可反映0Hz~0.4Hz內系統的幅相頻特性。
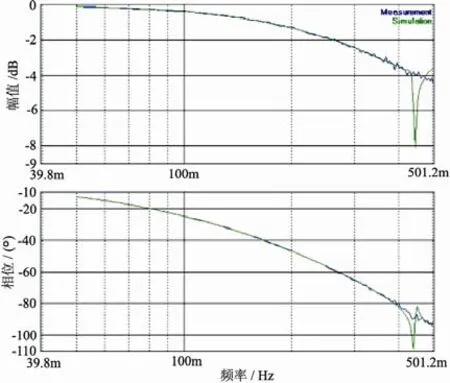
圖15 閉環速度控制系統實測及擬合Bode圖
5 結論
1)波浪補償絞車閉環控制系統的穩態特性較開環控制系統好,尤其是在滯環、線性度等指標。其中開環速度誤差最大值發生在輸入值為±10V附近,達到20%左右;而閉環速度誤差發生在輸入值為0V附近,最大為7.2%。
2)波浪補償絞車速度開環掃頻試驗幅頻寬和相頻寬均大于0.5Hz,滿足波浪補償絞車0.33Hz要求。
3)波浪補償絞車速度閉環控制系統幅頻寬和相頻寬均大于0.35Hz,滿足波浪補償絞車0.33Hz要求。
4)在前期仿真[7]過程中簡化并省去負載絞車和鋼絲繩對控制系統動態特性的影響,并且在仿真中忽略電氣死區、機械齒隙等很多非線性因素。因此,動態特性試驗結果與仿真結果雖然趨勢一致,但還有一定的差距,通過試驗可得到系統真實模型, 以對仿真結果進行修正。
5)在滿足動態特性的前提下,后續還需對控制策略進行分段化設計,如閉環系統在零位附近采用位置閉環控制,以進一步提高其控制精度。另外,應展開非線性和智能控制理論方法在實際應用中有針對性的研究。
[1]劉賀.波浪補償起艇絞車的研究[J].上海造船,2008(2): 30-31.
[2]許益民.電液比例控制系統分析與設計[M]. 北京: 機械工業出版社,2005.
[3]楊巍.多輸入多輸出正弦掃頻試驗控制方法研究與實現[D].南京: 南京航空航天大學,1998.
[4]吳根茂,邱秀敏,王慶豐,等.新編實用電液比例技術[M].杭州: 浙江大學出版社,2006.
[5]王春行.液壓控制系統[M].北京: 機械工業出版社,1999.
[6]宋志安.基于MATLAB的液壓伺服控制系統分析與設計[M].北京: 國防工業出版社,2007.
[7]楊毅.絞車電液伺服速度控制系統的研究[J].流體傳動與控制,2014(3): 10-13.
Test Research on Steady and Dynamic Characteristic of Wave Compensation Winch
CUI Ge
(Armament Department of PLA,Beijing 100841,China)
The technique of wave compensation winch is already widely used in offshore construction,scientific research,ocean platform and so on.The composition,working principles and tests of wave compensation winch are introduced in this paper.The steady characteristic and dynamic characteristic controlled by open-loop and closed-loop of wave compensation winch are analyzed by testing.In addition,open-loop and closed-loop control system is identified through frequency analyzer and the approximate transfer function is mastered.At last,it comes to a series of conclusions and puts forwards attentions,which can provide the research and analysis method for test in engineering practice.
wave compensation winch; steady characteristic; dynamic characteristic; sweep frequency;identification of system
TH137.31
A
10.16443/j.cnki.31-1420.2015.03.010
崔戈(1976-),男,工程師。主要從事船舶工程方面的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32