船舶電力推進系統諧波特性仿真與研究
2015-10-16 19:04:56易瑞庭
機電設備 2015年3期
易瑞庭
(中國船級社溫州辦事處,浙江 溫州 325000)
船舶電力推進系統諧波特性仿真與研究
易瑞庭
(中國船級社溫州辦事處,浙江 溫州 325000)
在Matlab的Simulink仿真環境下,針對電力推進系統四種不同運行工況,建立了基于Zigzag移相變壓器的四種仿真模型。通過對仿真試驗結果與實測數據的比較,驗證了仿真模型的正確性。通過運行仿真試驗得到的結論,研究了發電機內阻、系統不同工況及電力推進系統運行模式等因素對系統諧波特性的影響,這些研究結果為今后制定電力推進系統的運行管理方案提供了科學依據。還對改變移相變壓器的移相角度對系統諧波特性的影響進行了定量分析,其結果對整定移相變壓器的移相角度及匝數比具有指導作用。
電力推進;變頻調速;系統仿真
0 引言
在船舶電力推進系統中,由于推進變頻器的應用,變頻器整流及逆變單元采用的電力電子元件給船舶電力系統注入了越來越多的非線性負載。整流元件的單向導電性和通斷過程會造成電力系統中的電流及電壓脈動,使得推進變流器在運行時會產生大量諧波注入電網。諧波會使發電機產生附加諧波損耗、產生電磁干擾,從而降低電網中的電能品質,進而嚴重影響船舶電力推進系統中各種日用負載的用電質量,這種影響已經引起了人們的重視。
然而,直接對整個電力系統的諧波含量進行計算是一件極其復雜的工作。隨著計算機軟件仿真技術的發展,給船舶的工程設計帶來了一種新的設計方法,設計人員只需要根據設計對象搭建仿真模型,然后利用仿真軟件本身提供的多種分析工具,就可以對仿真對象進行全面的測試,這一技術大大提高了設計效率。
1 研究對象簡介
為了較全面的研究電力推進系統的諧波特性,針對電力推進系統運行的四種不同工況,建立仿真模型,其中工況一及工況二為兩臺變頻器并聯運行在虛擬24脈沖,工況三和工況四為僅有一臺變頻器在運行,運行在12脈沖模式。這四種不同工況數據詳見表1。
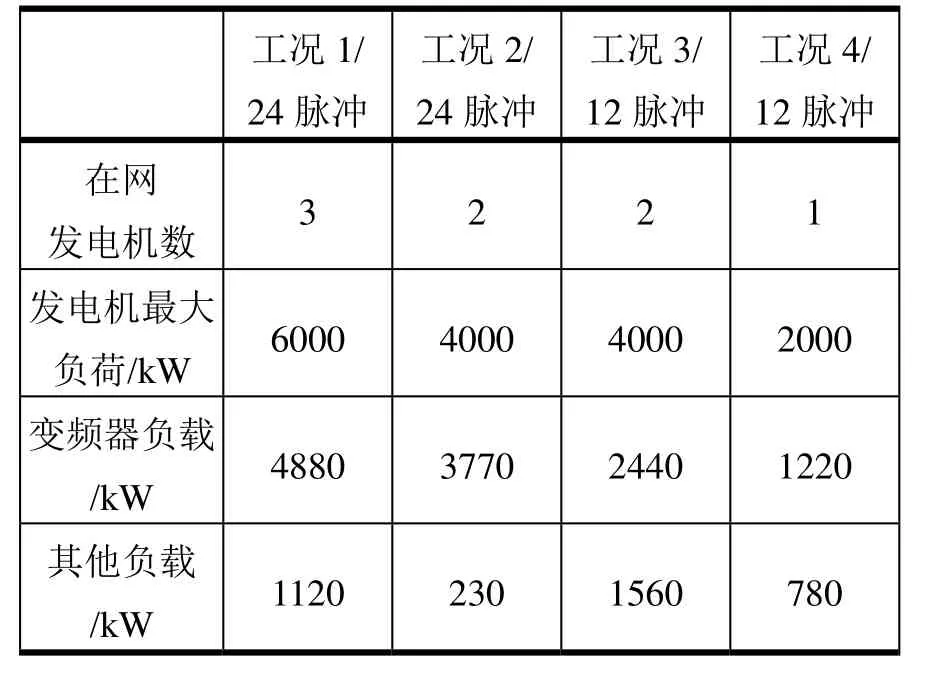
表1 研究對象四種工況數據
同時,為了說明系統采取推進變壓器作為移相電抗器后具有的諧波抑制作用,選取了工況一作為研究對象,通過改仿真模型中的移相角,來觀察系統中諧波的含量及波形的變化。
2 仿真模型構建方法概述
本文的仿真模型均采取了Simulink的子系統設計技術,利用子系統設計技術,將仿真模型分為三個部份,即主電路、控制子系統(Control)、測量與顯示子系統(Scope)三個部份。各個部份之間通過Simulink的“Goto”及“From”標簽進行數據傳遞及實現線路連接功能。這種分層設計的思路,使得主電路簡潔清晰、層次分明,主界面上僅顯示了三個主要的仿真電路,并且子系統僅且一個模塊就可表示;利用標簽功能,也大大減小了主電路模塊與其他模塊之間的連線。仿真模型中主要設備的處理方法如下:
1)發電機組的仿真
在仿真模型的搭建過程中,為便于仿真模型的建立與應用,需要對并聯運行發電機組進行等效處理,即將并聯運行的發電機通過換算,轉換為一臺發電機,并使用 SimPowerSystems工具箱中的三相電源模塊來代替實際的發電機組,等效后的三相電源的內阻及電感參數即是各發電機組內阻及電感并聯后的總內阻及總電感。
2)推進變壓器仿真
在仿真模型中,利用了SimPowerSystems的Zigzag移相變壓器來實現推進變壓器的功能,采用Yd1聯結方式,通過對參數進行修改,可任意改變移相角度。一次側接入發電機,二個副邊繞組分別與三相全控整流裝置相連,以構成12脈沖整流電流。二次側各繞組間還采用延邊三角形的辦法來實現移相,從而實現多重化整流。關于移相變壓器的諧波抑制原理在參考文獻[7]中有較詳細的闡述。
3)推進變頻器仿真
推進變頻器在仿真模型中由整流和逆變二部份組成,整流電路為12脈沖三相橋式全控整流,整流器件選用大功率二極管,整流控制電路選用了SimPowerSystems工具箱中的同步12脈沖發生器。逆變部份為采用三相 SPWM(正弦脈沖寬度調制)逆變電路,逆變器件選用IGBT(絕緣柵雙極型晶體管)功率模塊,相應的逆變控制模塊選用了SimPowerSystems工具箱中的離散12脈沖PWM發生器模塊。
4)變頻器負載
本文的研究目的是通過仿真,研究690V電網的諧波特性及預估發電機側的諧波含量。因此,為了方便對研究對象的主要問題進行分析,將變頻器后的推進電機及其他負載(如制動電阻等)簡化為恒功率的三相阻感負載。
5)仿真參數的設定
根據制造廠的給定值,本文仿真模型的總體輸入參數如表2所示。
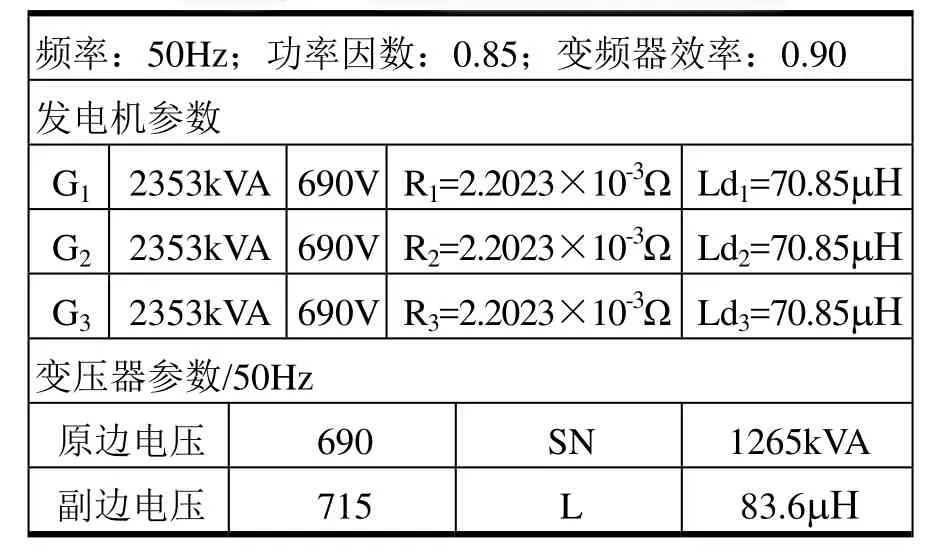
表2 仿真模型總體輸入參數
2.1 工況一仿真模型的構建
根據上述模型構建思路,建立了工況一的主電路、控制子系統以及測量與顯示子系統仿真模型,分別如圖1、圖2及圖3所示。
由于采用了子系統封裝技術,主電路顯得相當簡潔與直觀,與仿真對象的系統結構基本相同。在主電路仿真模型中,設置有Control及Scope二個子系統的模塊符號,子系統的仿真模型是在另外一層進行控制與顯示的,體現了分層設計的思想。為了得到仿真模型中的電壓、電流波形及數據,在發電機及每臺移相變壓器的輸出端各設置了一個三相電壓電流測量模塊,即圖1中的B1至B5,所有的監測信號傳遞至Scope子系統,可在該子系統的示波器中顯示監測對象的波形。在整流電路的輸出端,設置了一個小電阻r1,用于測量電路中的電流。整流與逆變電路之間并聯連接了一個平滑電容及電阻模塊,實現平滑整流輸出的功能。
圖2的控制子系統中,整流部份采用同步12脈沖發生器,頻率為50Hz,脈寬為20度,二個輸出端分別通過“Goto”標簽將控制信號傳遞至主電路。逆變部份采用12脈沖PWM發生器,SPWM的三角載波頻率為1080Hz,調制度設為0.85,調制波基波頻率為50Hz。
測量與顯示子系統的設計,考慮了需要測量的全部信息,但實際的波形顯示,只有發電機端電壓(相電壓)、發電機端電流、發電機線電壓及整流器輸出端電流,如要觀察其他的測量數據,只需對顯示子系統稍做修改即可。
在設計測量與顯示子系統時,使用了多測量模塊(Multimeter),該模塊最大的特點是示波器與被測信號之間不需要連接線,而且可以同時測量多個信號源。解決了當系統比較復雜時,觀測的信號源較多,單獨使用電壓、電流測量模塊進行觀測,產生大量的連接線,影響模型的可讀性及可維護性問題。

圖1 工況一主電路仿真模型(24脈沖)
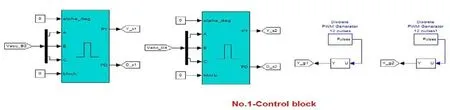
圖2 控制子系統仿真模型
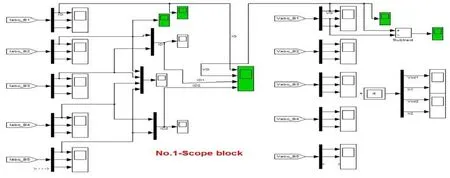
圖3 測量與顯示子系統仿真模型
2.2 工況三仿真模型的構建
工況三仿真模型是工況一模型的簡化版本,二者之間的區別主要是:工況三運行在12脈沖模式;有關模塊如三相電源等的參數設置與工況一不同。
工況二的仿真模型與工況一完全一致,二者均運行在24脈沖模式,工況二為兩臺發電機組并聯運行,不同的是二者模塊參數的設置。同理,工況四與工況三的仿真模型完全一致,都是運行在12脈沖模式,只不過工況四是一臺發電機組在網運行。
3 仿真試驗與結果分析
一個成功的仿真模型是設計者理論知識與實踐經驗的完美結合,而這又通過仿真參數的設置體現出來。本文仿真模型中求解器算法選用了適合于電力系統的ode23tb算法,該算法運行在變步長模式,ode23tb采用 TR-BDF2算法[1],即在龍格-庫塔法的第一階段用梯形法,第二階段用二階的 Backward Differentiaton Formulas算法,其他詳細設置參見圖4。
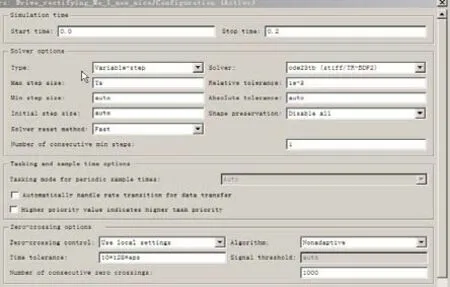
圖4 仿真求解器參數設置
本文的仿真試驗在參數設置時考慮了以下因素:
1)在建立了仿真模型后,添加了電力系統電路分析的圖形用戶接口“Powergui”模塊,這是電力系統仿真必須添加的模塊,當然,在Simulink2008版及以后,運行仿真時也會自動添加該模塊;2)求解器算法的選擇,由于電力系統屬于剛性系統,一般應選擇適合于剛性系統的求解器算法,如 ode15s、ode23s、ode23tb等;3)在電力系統仿真建模時,至少應設置一個測量模塊,否則無法運行。
3.1 仿真試驗及其結果
各仿真模型構建完成,并設置好求解器的各項參數時,需要仿真模型進行調試,運行過程中,可能會出現一些提示信息,或是出錯,這時需要根據出錯的提示信息來調整仿真模型或是參數設置。
運行圖1的仿真模型,系統進入穩態后,通過測量與控制子系統,得到各測量信號的波形信息,為了得到線電壓的波形及諧波估算數據,單獨設置了一個測量線電壓的示波器Scope19。圖5為運行仿真試驗后發電機輸出電流與電壓(相電壓)。
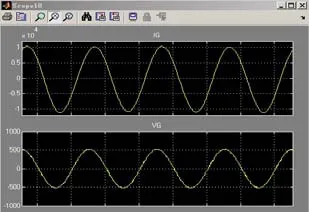
圖5 發電機輸出電流及相電壓波形
運行圖1中圖形用戶界面“Powergui”后,通過快速傅里葉分析工具 FFT,可得到該工況的發電機輸出電流、發電機線電壓的諧波分析數據,詳見圖6,各次諧波的分布見圖7。
由此得到該電力推進系統不同工況的仿真試驗數據,這一數據較全面的反映了電力推進系統的諧波特性。在該船的航行試驗過種中,也實測了除工況四以外的其他三個工況的總電壓諧波含量,與仿真試驗數據基本相符,進一步驗證了仿真模型正確性。實測數據參見圖8,仿真試驗結果與實測結果的對比詳見表3。
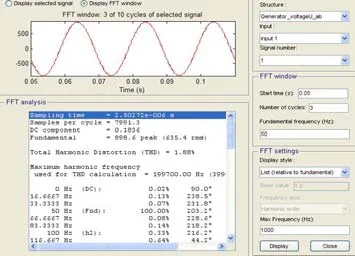
圖6 發電機輸出線電壓諧波分析數據
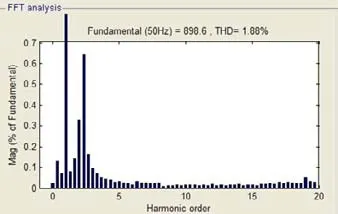
圖7 工況一發電機輸出線電壓各次諧波分布圖

圖8 工況一、工況二、工況三實測數據
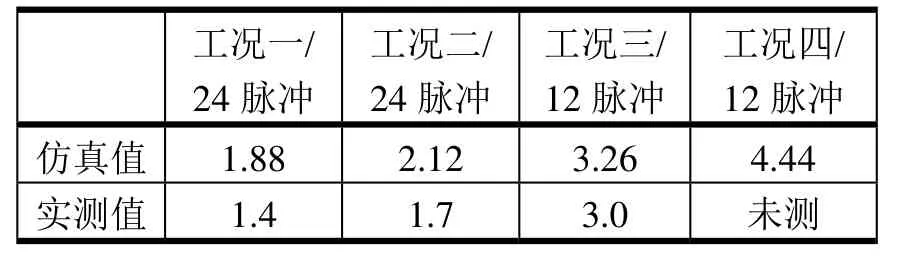
表3 仿真試驗數據和實測THD數據對比(Uab)
3.2 移相變壓器仿真試驗及其結果
采用移相變壓器來消除電力電子裝置等非線性負載產生的高次諧波電流和電壓,是一種經濟性很好的諧波抑制方法。電力推進系統中5、7、11、13等次諧波含量較大,因此電力推進系統中的通常都設計有推進變壓器作為移相變壓器,這種設計主要是為了綜合消除這些特征次諧波[7]。實際應用時,通過選取合適的繞組匝數和采用合理的相間繞組的連接方式后,可獲得所需要的相位移,使某些高次諧波電流互相抵消,同時三相輸入端電壓經移相變壓器后,輸出為六相端電壓,從而可削減向電網注入的某些高次諧波。圖9為移相變壓器的連接方式及其矢量圖。
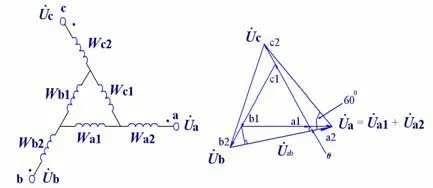
圖9 三相變壓器Yd1逆延聯結
從圖中可知,各組二次側的基本繞組(al,b1,c1)采用三角形聯結,與一次側Y部分的聯結方式為Yd l,其移相繞組(a2,b2,c2)在各三角形的頂點延伸出來,故稱為延邊三角形方式,本方法中的移相繞組是在各組基本繞組的反向端延伸出的,將其稱為逆延聯結。設變壓器一次、二次繞組匝數分別為N1和N2,則二次側的基本繞組和移相繞組的匝數分別為(1-k)N2和kN2,其中k為繞組系數0<k<1,則:
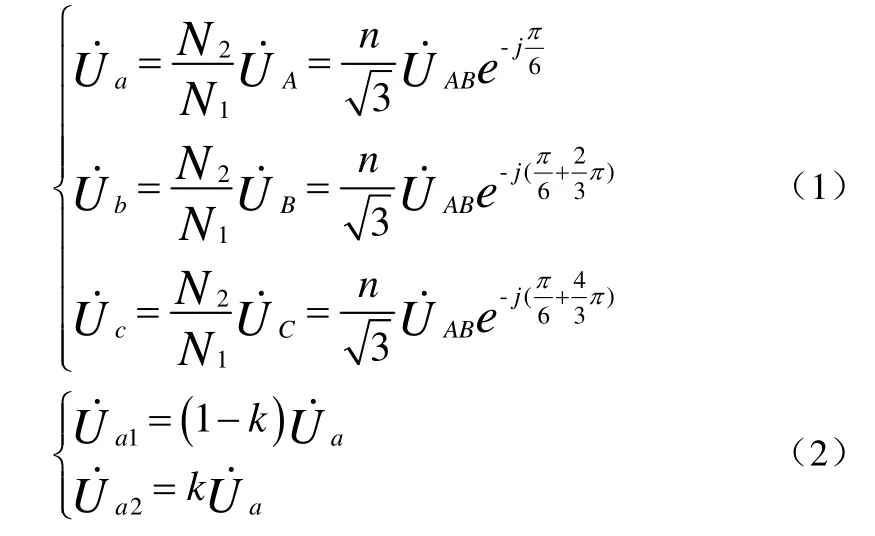
式中,n為變壓器的匝數比;UA為輸入的A相相電壓,V;UAB為輸入線電壓,V。由向量圖及上面兩式可得到變壓器二次側電壓為:

由圖9所示的二次線電壓合成的小三角形中,可以得到如下數量關系:
式中,θ為二次線電壓超前于一次相電壓的相位角;α為二次線電壓超前于一次線電壓的相位角。由于0 利用工況一的仿真模型,通過改變移相變壓器的二次側移相度角θ,可得到相關的仿真試驗數據,詳見表4所示。 表4 改變移相角度后仿真試驗結果 通過比較表1.3的仿真試驗數據及實測結果,兩者數據基本相符,存在誤差的原因,其一是因為在Simulink的仿真分析工具FFT是采用快速傅里葉分析方法,該方法存在柵欄效應和泄漏現象,使得計算得出的信號參數存在誤差;其二是因為仿真模型中對推進變頻器的負載是采用阻感負載,與實際電路中推進電機運行的情況不一樣。 通過分析仿真試驗數據與實測數據,可以得到以下一些值得討論的信息與結論: 1)發電機內阻對諧波含量的影響 在電力推進系統同樣是工作在24脈沖或12脈沖的情況下,電網中并聯運行發電機的臺數對電力系統中諧波含量的影響較大,在仿真模型參數的設置中,并聯運行的發電機相當于降低了發電機的內阻,例如工況一的發電機內阻較工況二減小了 33.6%,而其總電壓諧波含量較工況二減小了 11.3%,因此可以得到這樣的結論,降低發電機的內阻可改善電網的諧波含量。同時也應注意,過低的發電機內阻,將會導致電網短路電流的上升,這二者之間協調關系在工程設計上是值得考慮的。事實上,也不可能將發電機的內阻做到很少,那樣將大大提高制造成本及增加發電機設計與制造的難度,但從仿真試驗的結果可以看出,通過增加并聯運行的發電機臺數是一種實際可行的辦法。 2)運行模式對諧波含量的影響 仿真的試驗結果表明,當電力推進系統運行在24脈沖整流模式的工況下,較12脈沖在總電壓諧波含量有很大的改善。較好的解決了發電機端的諧波抑制問題,這一結論與參考文獻[5]、[6]中相關結論是一致的,這一技術不僅在理論上,而且在實踐上已被證明是改善電網諧波的重要措施。 3)不同工況對諧波含量的影響 對一個電力系統進行諧波預估與分析應是一個綜合分析,因為影響系統的諧波畸變因素來自多個方面,但從已有的研究及實踐結果可知,電力推進系統中的變頻器是主要諧波源。這些主要諧波源運行在不同工況下也會產生不同的影響。比較仿真試驗數據與實測結果可以看出,不同工況下,發電機端總電壓諧波含量變化較大。 這四種工況的仿真結果,比較全面的反映了該電力推進系統的諧波特性。這一結果是在各種諧波抑制措施與諧波源共同作用的結果。雖然各種工況的仿真試驗結果中,總諧波電壓含量均未超過5%,但進一步仿真試驗及其結果表明,工況 4在變頻器負載超過一定數值時(約1220kW),總諧波電壓含量將超過5%。這一現象及結果,告訴船舶營運方,在該電力推進系統的實際運行過程,應盡量避免出現這一工況,這對于該電力推進系統的運行與管理有一定指導意義。 仿真試驗及實測的結果也表明,該電力推進系統在諧波抑制方面采取的針對性措施是有效的,正是由于在建造過程中采取了以下一些措施,才使得該電力推進所帶來的諧波含量未超出規定值: 1)在推進系統中配備了推進變壓器,其作用是將推進配電板輸出的電源,經變壓器移相,改造諧波源。 2)推進變頻器采用了24脈沖的二極管整流電路,也可運行在12脈沖工況下,可極大改善電網諧波。 3)推進變頻器采用了PWM技術,減少低次諧波的產生,可使諧波對電網用電設備的影響降低。 4)采用了高功率因數的變頻器,本船配備的變頻器功率因數可達 0.98,最大限度的降低了無功功率,同時也改善了電網諧波。 5)在變頻器與推進電機之間的連接電纜,采用了SIEMENS推薦的適用于變頻電路的具有良好電磁兼容性的進口電纜,進一步減少變頻電路對其他負荷的影響。 [1]林飛,杜欣.電力電子應用技術的Matlab仿真[M].北京: 中國電力出版社,2009. [2]陳家金,王和平.船舶電力推進系統的發展[J].世界海運,2006(4): 9-11. [3]高海波,陳輝,林治國.民用船舶電力推進系統的發展[J].中國水運,2005(1): 45-46. [4]武福愿.船舶電力推進系統諧波抑制方法研究[D].武漢: 武漢理工大學,2009. [5]張洋,楊平西,陳琳.船舶電力推進系統諧波特性仿真與試驗[J].船舶工程,2009,31(增刊): 98-101. [6]李先林.電力推進船舶電網諧波分析[D].大連:大連海事大學,2004. [7]周麗霞,尹忠東,肖湘寧.基于移相電抗器的電力推進船舶電網諧波抑制[J].電工技術學報,2007,.22(8): 90-94. [8]吳竟昌,孫樹勤,宋文南.電力系統諧波[M].北京: 水利電力出版社,1988. Simulation and Research on Harmonic Characteristics of Vessel’s Electric Propulsion System YI Rui-ting This paper establishes on the basis of zigzag phase transformer four new simulation models respectively according to four different operation conditions of the electric propulsion system under MATLAB Simulink simulation environment.Through comparison of simulation results and measured data,the accuracy of the simulation model is verified.This paper conducts a research on the influence the internal resistance of the generator,different operating system and electric propulsion system run mode and other factors impose on harmonic characteristics by using the conclusion of running simulation test.These findings provide a scientific basis for the future development of electric propulsion system operation and management.This paper also conducts quantitative analysis of the impact of changing phase transformer of phase angle on harmonic characteristics,the results of which play as a guide on setting phase shift angle of phase shifting transformer and turns. electric propulsion; variable frequency speed regulating; system simulation U664 A 10.16443/j.cnki.31-1420.2015.03.006 易瑞庭(1975-),男,工程碩士,主要從事船舶電氣自動化及船舶電力推進系統的研究。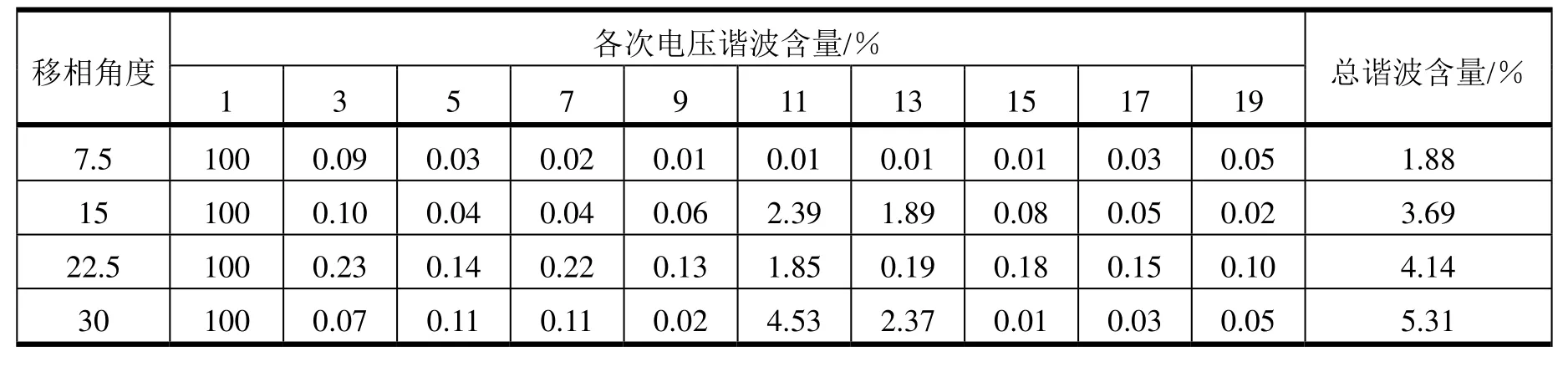
4 仿真結果討論與分析
(Wenzhou Bureau of CCS,Wenzhou 325000,China)
猜你喜歡
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
通信電源技術(2018年3期)2018-06-26 06:33:30
電子制作(2017年7期)2017-06-05 09:36:13
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(2016年3期)2016-03-26 07:13:46
電力工程技術(2014年1期)2014-03-20 14:19:06