基于Solidworks的組合機構運動仿真與分析
2015-10-10 13:50:44白艷
橡塑技術與裝備 2015年22期
關鍵詞:設計
白艷
(風神輪胎股份有限公司,河南 焦作 454003)
基于Solidworks的組合機構運動仿真與分析
白艷
(風神輪胎股份有限公司,河南 焦作 454003)
利用Solidworks對齒輪凸輪機構和齒輪連桿機構進行運動仿真,研究其運動規律;通過仿真模擬得到了位移、速度和加速度的運動曲線;最后針對上述兩種組合機構的運動曲線進行了對比分析研究。研究結果為掌握組合機構的組成原理、運動性能和動力性能提供了理論依據;增強了機構設計的直觀形象性,并且可以為機構的優化設計做好鋪墊。
運動仿真;機構;Solidworks
現代化機械產品和機械設備朝著高精度、高負載及自動化的方向發展,單一的機構遠遠不能滿足我們的實際生產需要,越來越多的組合機構出現在現代機械產品中,日本利用齒輪連桿組合機構已設計出了多款機器人,向自動化邁出了一大步;美國利用齒輪連桿機構已設計出了月球探測器和著陸器,因此組合機構的運用成了現代工業發展的趨勢。
對于機構的設計傳統方法多采用軌跡圖法或根據幾何約束條件建立方程組進行求解。但對于三個以上的組合機構,其運動的多樣性及軌跡的復雜性使得軌跡法和計算法顯得非常復雜,并且很難保證求解的準確性。SolidWorks三維繪圖軟件是集設計與運動一體的軟件,通過三維建模并進行運動仿真,能夠很好的得到機構運動曲線,并縮短產品開發的時間,同時也能為后續機構的優化設計打下基礎。
1 齒輪凸輪機構運動仿真
齒輪凸輪機構由齒輪機構和凸輪活塞機構組成,其工作原理圖如圖1所示。A為小齒輪,B為大齒輪,C為凸輪機構,D為活塞機構。當馬達帶動小齒輪運轉時,小齒輪帶動大齒輪運動,其結構起到了一個減速的作用,大齒輪帶動凸輪機構運動,凸輪機構通過其輪廓曲線帶動推桿機構作上下平動,推桿機構鏈接著活塞機構,使活塞機構作往復運動。由于凸輪機構的輪廓曲線較復雜,不易得到預期的運動規律[1]。因此在本設計將凸輪與連桿機構進行對比,以觀察兩種機構的運動特點。從而研究連桿機構在本設計中的相對凸輪機構的優點。
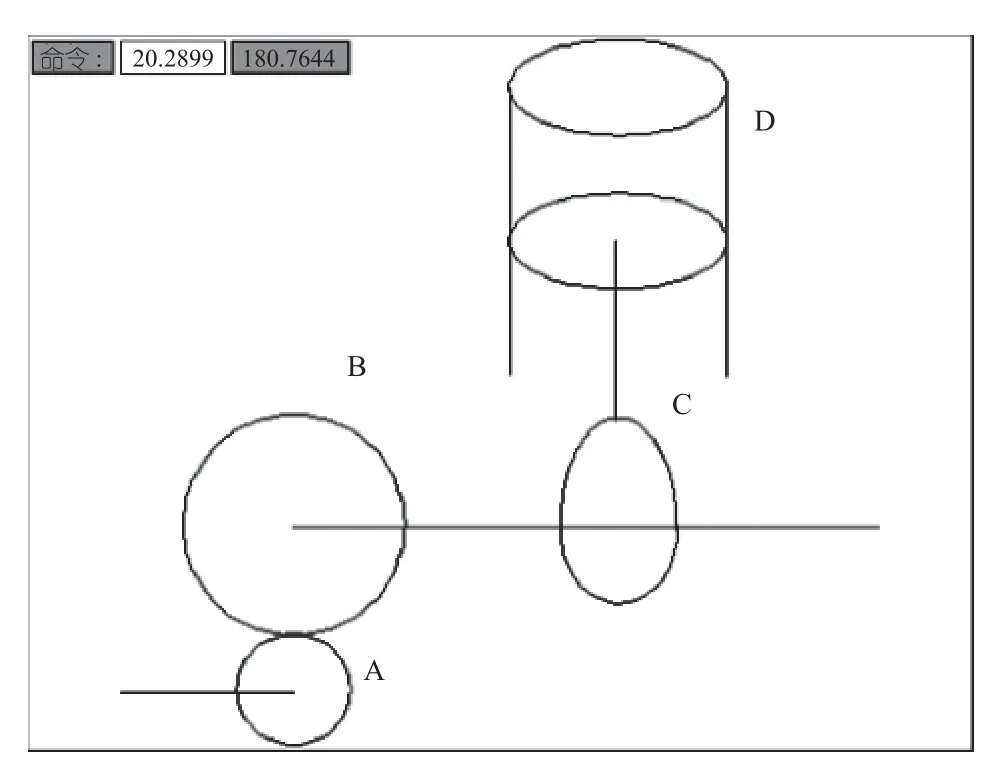
圖1 齒輪凸輪機構的運動簡圖
小齒輪分度圓D1=40 mm;大齒輪分度圓D2= 60 mm。連接齒輪與凸輪的連桿如圖1所示;凸輪的基圓半徑r0=25 mm,;凸輪的運動帶動推桿作上下平動,推桿連接著活塞,活塞的活動盤直徑d1=40 mm;推桿的長度L=60 mm;將各零件圖裝配得到齒輪凸輪機構的裝配圖如圖2所示。最后進行動畫仿真,在裝配的過程中注意小齒輪與大齒輪的嚙合、凸輪與推桿機構的嚙合,要限制其自由度,因此連接處要用到鍵或用六角連桿,為了便于設計與繪畫,此裝配采用六角連桿[2]。
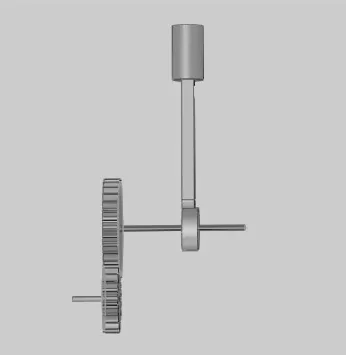
圖2 齒輪凸輪機構的裝配圖
給小齒輪添加旋轉馬達提供其運動,當小齒輪在馬達的驅動運動時,小齒輪將動力傳給大齒輪,由于剛開始不需要活塞的往復運動較快,所以這里起到了一個減速的作用。我們設置小齒輪的轉速為10 r/min,仿真時間5 s,進行仿真[3]。仿真結果的位移、速度、加速度圖如圖3、圖4、圖5所示。
2 齒輪凸輪機構運動仿真結果分析
根據位移圖所知,凸輪推桿的位移是隨著運動使推桿先向上運動到最高點,此過程為推程;由于凸輪有一個以軸心為圓的圓弧,所以推桿有一段時間處于最高位置而靜止不動,即為遠休止;經過遠休止后,推桿又隨著不規則的圓弧運動回到起始點,這個過程為回程;凸輪繼續運動時,推桿又重復上述過程。凸輪機構按照某規定的運動曲線運動,其凸輪輪廓的設計與制造較困難,因此本文利用齒輪連桿機構來代替齒輪凸輪機構。
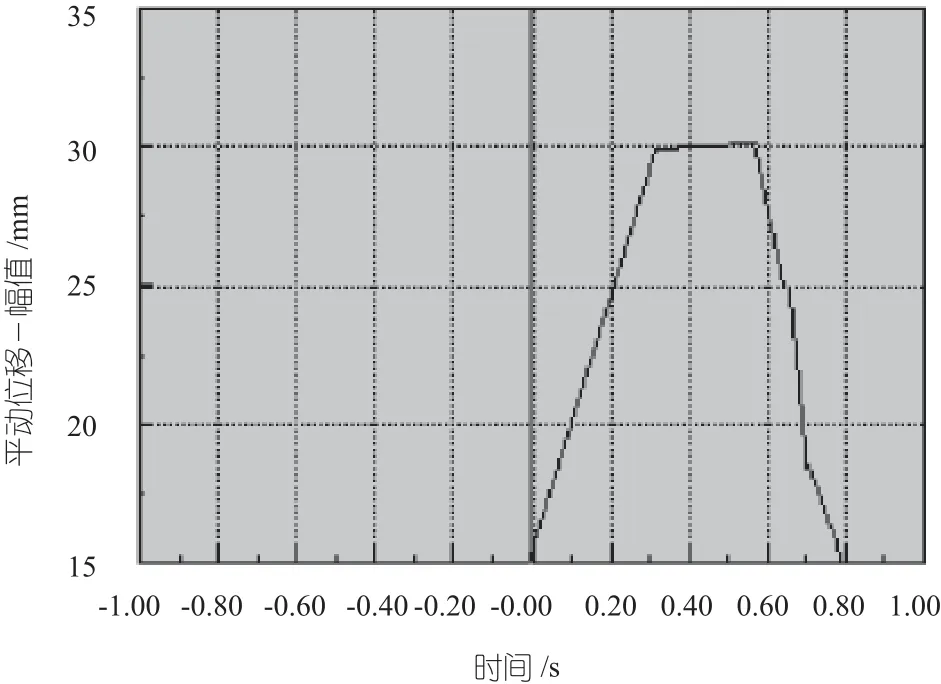
圖3 齒輪凸輪推桿的位移圖
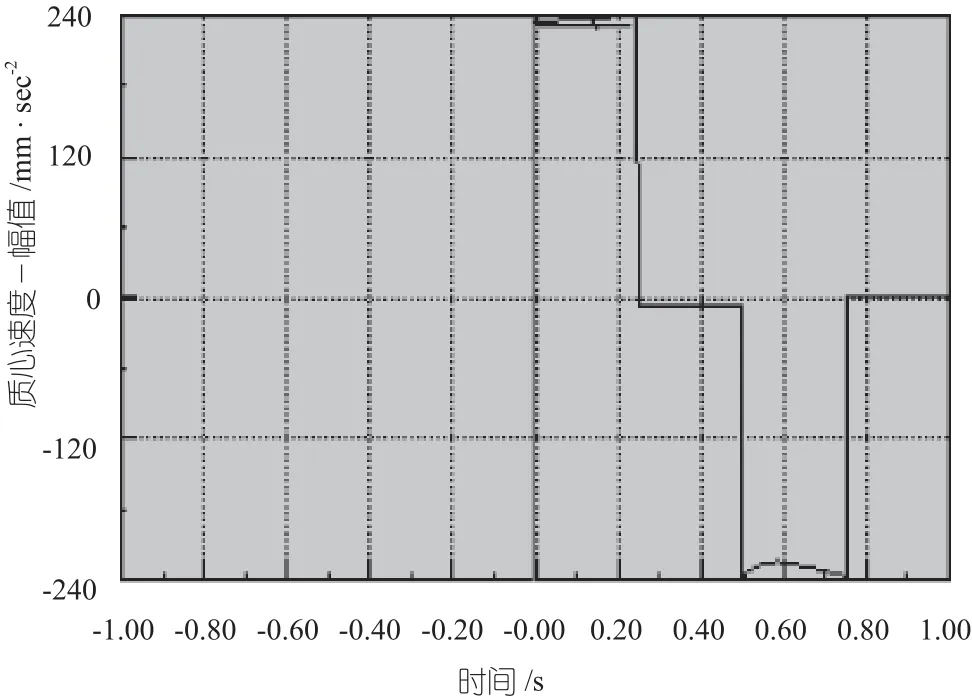
圖4 齒輪凸輪推桿的位移圖
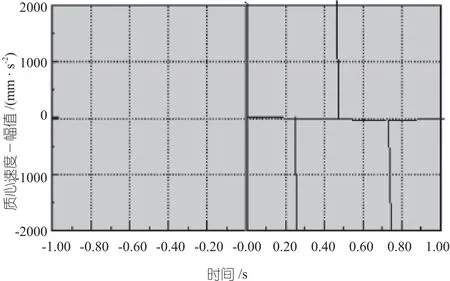
圖5 齒輪凸輪推桿的位移圖
根據凸輪推桿的運動速度圖可知,推桿在凸輪運動過程中先是加速運動到最大速度,保持最大速度運動一段時間,然后減速至零;凸輪繼續運動,推桿作回程運動,此時推桿的速度再次變大,方向發生變化。由于此時的凸輪并不規則所以推桿的速度最高點取決于不規則曲面的長度,當到達速度最高點時,推桿作減速運動直到回到運動起始點,此時速度為零。
根據推桿的加速度圖可知,剛開始為無窮大;推桿勻速上升過程,加速度為零;推桿速度為零時,加速度也為零;推桿反向運動,加速度增大;當速度達到反向最大時,加速度為零。
3 總結
研究結果表明,利用Solidworks可以得到準確得到機構運動特性;可以直觀的得到機構在任意時間運動的數值;同時通過仿真動畫,可以真實的觀察到機構運動的全過程,并且得到的運動參數與理論知識計算所得結果相吻合,為機構設計提供了有效真實的理論依據,同時也為后續的機構優化設計提供了實驗數據。
[1] 孫桓,陳作模.機械原理[M].6版.北京:高等教育出版社,2001.
[2] 詹迪維. Solidworks快速入門教程(2012中文版)[M].北京:機械工業出版社,2011.
[3] 劉靜.挖掘機器人虛擬樣機建模策略與仿真技術研究[J]. 浙江大學學報(工學版),2004(11):1.
(P-05)
Solidworks based motion simulation and analysis for combinations
TQ330.4
1009-797X(2015)22-0154-03
B DOI:10.13520/j.cnki.rpte.2015.22.062
白艷(1976-),女,工程師,畢業于河南理工大學電力系統及其自動化專業,風神輪胎股份有限公司,主要從事信息化建設和管理工作。
2015-09-17
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04