力感知系統的研究綜述
2015-09-12 14:00:19豆勤勤
中國高新技術企業 2015年34期

摘要:文章介紹了力覺感知系統的結構原理,對力覺感知系統的驅動結構、新型材料磁流變液以及當前力覺反饋設備進行了綜述,提出了一種新型的基于磁流變液裝置的力覺感知系統結構。該新型結構型式相對簡單,幾乎無磨損,器件壽命長、所用材料來源豐富、價格低廉,有良好的工程應用前景。
關鍵詞:力感知;磁流變液;力覺反饋設備;遙控機器人;傳感器 文獻標識碼:A
中圖分類號:TP393 文章編號:1009-2374(2015)34-0002-03 DOI:10.13535/j.cnki.11-4406/n.2015.34.002
1 概述
在遙控機器人工作系統中,操作者一般是通過機器人本身攜帶的傳感器來獲取并感知遠端機器人的工作信息。目前采用的手段主要有視覺和觸覺傳感。其中觸覺傳感與反饋同時發生,精確度較高,實時性較強。而力覺又是觸覺中較復雜的一種感知。力覺反饋是指上位機對操作者輸入的信號進行作用,并通過力覺反饋設備反作用于操作者的過程。在此過程中,力覺反饋設備利用機器人傳感器測量操作者的運動信息,并將數據準確地反饋給上位機,上位機根據力覺生成算法自動生成力覺反饋設備的控制信號,分別傳輸給顯示設備和力覺反饋設備,并將遠端作業環境中生成的力感反饋給操作者,使操作者產生身臨其境的力覺臨場感(如圖1所示)。力覺反饋設備是機器人遙控工作系統中對力覺信息感知的關鍵部件,是操作者感知機器人工作環境并對其進行控制的重要媒介,具有人機接口的作用。
圖1
力覺信息主要通過反饋設備的驅動機構提供給操作者,因此,如何有效地提供力覺反饋和位置控制精度是力覺臨場感知系統研究的關鍵。力覺反饋設備由于工作環境的關系應該具備結構簡單和緊湊、操作靈活輕便、摩擦和慣性小等特點,并且能夠提供合適的操作空間和出力,符合動力學特性,具有通用性。理想的力覺臨場感能使操作者感知的力等于從手與環境間的作用力,同時從手的位置能夠準確地再現主手的標定位置,此時的力反饋控制系統稱為完全透明的。
2 力覺反饋設備驅動方式研究現狀
目前的力覺反饋設備主要采用電動、液壓、氣動等型式的驅動方式,還有其他新型功能材料,如形狀記憶合金機構、壓電晶體驅動機構、電致和磁致伸縮驅動機構以及氣動肌肉驅動機構等構成的新型驅動機構。
直流力矩電機具有反應速度快、轉速波動小、低速穩定、可以直接帶負載的特點,并且機械特性和控制特性線性度好,能夠在長期運轉或低速運行時產生足夠大的轉矩。這些特點使得它能夠用在位置伺服或低速伺服系統中作為執行元件。但是直流電機施加到力反饋手柄上力是經過一級齒輪減速器減速增力,再通過連桿機構進一步地增力并變換力的方向完成的,這種結構由于存在齒輪機構和連桿機構的機械磨損,增大了力覺反饋誤差,從而影響了位置控制的精度。
氣壓傳動的驅動方式具有柔性、安全、重量輕等特點,并且比較清潔,不會污染環境,適合制作成便攜式的操縱器。但是氣體具有可壓縮性,并且氣體通過閥口流量具有非線性,氣缸本身存在摩擦力,因此氣動系統屬于非線性系統,很難實現精確的位置控制。現實中用得最多的是采用控制脈沖寬度的脈寬調制,但這種方式噪聲大,存在穩態波紋、閥的壽命較短等缺點。
液壓傳動具有功率密度大、響應快等特點,能夠實現精確的位置和力控制,需要有一套專門的泵站,并且為了減少泄漏,液壓元件在制造精度上要求較高,造價較貴,更重要的是液壓油存在可壓縮性和泄露、摩擦等缺點,液壓傳動時的傳動比不能夠保證嚴格,因此在工作時會有較大的能量損失,同時油溫的變化、油液的污染也對液壓傳動的工作穩定性影響比較明顯。
形狀記憶合金機構作為一種驅動方式,做成電驅動器,可以代替電磁螺線管以及伺服馬達、液壓、氣動裝置。與其他的驅動方式比較,形狀記憶合金機構的電驅動器結構設計簡單、緊湊,沒有噪音,并且成本較低。但是容易疲勞失效,盡管能夠快速加熱實現驅動,冷卻過程較長,對使用的環境溫度要求較嚴格,一般不要超過100℃。到目前為止很少有實用化的高溫形狀合金材料可供選擇使用。利用磁流變阻尼器作為半主動控制中的驅動機構,能夠實現快速并高效的狀態切換,并且只需消耗少量控制能量;磁流變阻尼器的結構相對于其他驅動裝置較簡單,所用材料來源豐富、價格較低,工程應用前景較好。
3 磁流變液的研究現狀
磁流變液是一種磁性膠體溶液,由表面活性劑包覆磁性微粒,并且高度分散在基液中形成。即使有重力場和內部磁力的作用,這種溶液也不會出現凝聚和沉淀現象。加上外磁場后通常被磁化,顯示出超順磁性;去掉外加磁場后,又能夠恢復到原來雜亂無章的無序狀態,消失掉宏觀特性。此種液體不僅具有固體的磁性,而且還有液體的流動性,作為一種新型的功能材料,在很多領域有著廣泛的應用。
磁性液體在20世紀60年代初由美國宇航局研究開發,是為了解決宇宙服可動部分的密封及如何在空間失重條件下進行燃料的補充等問題。世界上第一個具有實用意義的制備磁性液體的專利是由S.S.Pappell在1965年獲得的。在磁性液體出現以后幾年內,就開始被應用在科學實驗以及工藝裝置中了。此后,各國紛紛開展對磁性液體技術的研究,如日本、前蘇聯、英國等。我國起步較晚,在20世紀70年代末期才開始對磁性液體及相關應用展開研究。
磁性液體不僅有固體的磁性,還有液體的流動性。作為一種新型的功能材料,具有多種特殊性質,如黏度特性、力學特性、光學特性、聲學特性及溫度特性,同時具有較大的屈服應力(可達50~100kPa),對污染不敏感,且一般采用12~24V低壓電源,工作溫度范圍較寬(可達-40℃~150℃),因此在諸多領域有著廣泛的應用。
從20世紀80年代中期開始,對磁流變液及相關理論和應用開始廣泛起來。其中美國的Lord公司和Notre Dame大學對磁流變裝置進行了大量的研究和應用。其他國家如德國、法國、俄羅斯和日本等也投入了大量的資金和科研對磁流變等智能材料和裝置進行研究,以便應用在軍用和民用等領域產品。磁流變阻尼器的各種動力模型結構也已經建立了起來。近年來大量涌現出應用磁流變液做成的各種阻尼器、制動器、離合器、拋光裝置、液壓閥、密封裝置、復合構件、柔性夾具、健身器、人造關節等方面的產品。
4 力覺反饋設備研究現狀
能夠把力覺反饋給用戶的反饋感知硬件即是力覺反饋設備。目前的力覺反饋設備從可攜帶性看分為桌面式反饋設備和可穿戴式反饋設備兩類。
桌面式反饋設備是由操作者操作其控制末端,反饋設備根據檢測到的末端點的位置來計算應出的力,操作者經過驅動裝置來感知力的大小,這種設備一般是固定在桌面或地面上。目前應用得最多的是由美國SensAble公司生產的“PHANTOM”(Personal Haptic Interface Mechanism)力/觸覺反饋設備。此設備包含一個末端帶有鐵筆的力反饋臂,作為其主要部件,能夠實現六自由度運動,其中3個是活躍的,可以提供平移力反饋。PHANTOM具有三軸準運動解耦以及重力自平衡等特性,并且有良好的靜態特性、較高的動態響應能力,但是產生的反饋力較小。由日本Okayama大學的則次俊朗教授研究的氣動并聯機構可以實現力覺再現,并且這種結構承載能力較大、位置控制精度高、動力學特性好、反解容易,但是其工作空間較小,正解困難,存在奇異位形。
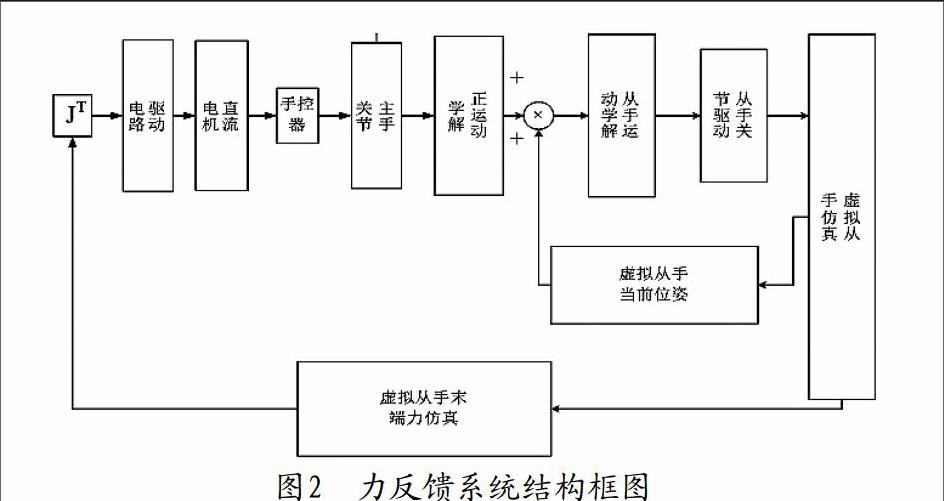
可穿戴式反饋設備一般是需要佩戴在手上或手臂上的反饋設備,主要有電機驅動(系統結構框圖如圖2所示)、液壓驅動、氣壓驅動、磁力驅動和電流變體驅動等驅動形式。Virtual Technologies公司開發的Cybergrasp是一款商用力反饋數據手套,它是在Cyber-Glove的基礎上進行研發的,由伺服電機進行驅動,外骨架機構由鋼絲繩傳遞力,最大可以提供16N的阻尼力在手指上。但是其重量較大,用戶長時間佩戴以后會感到疲勞。與之相似的還有Hashmioto設計的力反饋數據手套和Bouzit設計的由力矩電機進行驅動的LRP數據手套。
圖2 力反饋系統結構框圖
利用氣動肌肉實現力覺再現由捷克的Lukas Kopecny進行研發。氣動肌肉通過控制壓力來產生橫向力,其一端固定在支架上,另一端固定在套管上,并戴在手指上的。由美國Rutger大學的Burdea研發的Rutger Master Glove是一種內置式多指力反饋數據手套。該手套能夠連續產生16N的阻尼力在每個手指上,并且摩擦較小,但是手指的運動空間會受到一定的限制。另外,還有日本的HOSEI大學田中實驗室研制的Fluid PowerGlove,它也是一種驅動器內置式的數據手套。
美國南曼瑟迪斯特大學機械工程系研究的PHI系統可以在手臂上實現力反饋,相當于遙操作中的主手,能夠跟蹤肩和肘的運動,其中由3個正交放置的氣缸來實現肩部的球關節,由1個氣缸實現完成肘部關節。英國Salford大學設計的由氣動人工肌肉驅動的七自由度外骨架式力覺再現裝置,可以正確地復現接觸力,其中肩部有3個自由度,肘部和腕部分別有2個自由度。
在GAS-Glove基礎上,由中科院研制的點式力覺反饋系統,采用的是比例電磁鐵驅動外骨架式力反饋裝置,能夠在給用戶的指端施加阻尼力的同時,約束手指局部關節的運動,一定程度上防止了虛擬手嵌入虛擬物體中。同時,東南大學和哈爾濱工業大學SMC氣動技術中心分別對力覺數據手套進行了深入的研究。
5 結語
大部分已開發的力/觸覺反饋設備的重量和體積都比較大,用戶長時間使用這樣的設備會感覺到非常疲勞。采用磁流變驅動器可以起到傳統機構中傳感、驅動和傳遞三系統功能的作用。這種設計上的簡化以及磁流變阻尼器件沒有轉動滑輪和齒輪的事實,使得產品的超小型化和集成化成為可能,在消耗少量控制能量的情況下,能夠實現快速、高效的狀態切換;并且磁流變阻尼器結構型式相對簡單,具有電控機械器件的能力,幾乎無磨損,器件壽命長、所用材料來源豐富、價格低廉,有良好的工程應用前景。
參考文獻
[1] 馬來貽,尹衍升.磁性液體的研究現狀[J].四川化工,2005,8(3).
[2] 楊文珍,高曙明,萬華根,朱振華,駱陽.基于物理的虛擬手交互碰撞力覺生成和反饋[J].計算機學報,2006,29(12).
[3] 楊文珍,高曙明,萬華根,朱振華,駱陽.基于物理的虛擬手抓持力覺生成和反饋[J].計算機學報,2005,28(6).
[4] BaoGang,Sun Zhongsheng,Wang Zuwen.Force Feedback Data-glove Based on Pneumatic Artificial Muscles[J].Chinese Journal of Mechanical Engineering,2006,19(4).
[5] C.S.Tzafestas.Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation[J].IEEE Transactions on Systems,Man and Cybernetics:Part A:Systems and Humans,2003,33(1).
[6] L Kopecny.Producing of Tactile Feedback via Pneumatic Muscles[E/B].IEEE International Conference on Industrial Technology,2003.
[7] 戴金橋,王愛民.基于數據手套的力覺再現裝置的設計[J].傳感技術學報,2004,(3).
[8] 劉斌,李愛群.磁流變阻尼器及其研究進展[J].常州工學院學報,2005,(18).
基金項目:安徽省科技廳自然科學基金(項目編號:KJ2013B039)。
作者簡介:豆勤勤(1985-),女,河南周口人,安徽工業大學工商學院電氣信息系講師,碩士,研究方向:智能機器人。
(責任編輯:周 瓊)
