基于Kinect 傳感器的三維重建算法研究
2015-08-26 06:37:56夏選太
電子設計工程 2015年17期
李 秦, 夏選太
(1. 陜西財經職業技術學院 陜西 咸陽 712000; 2. 西安創聯新能源設備有限公司 陜西 西安710065)
隨著現代視覺技術的不斷發展,三維重建技術開始被廣泛的應用在各個行業和領域當中,改變著人們在生產、生活,如通過三維重建,可輔助分析病人病情,并模擬手術。 而作為美國微軟公司生產的一部紅外線深度攝像機,其可非常快速的獲取相關的圖像,并在三維重建方面具有非常低廉的成本和靈活性。 但是,傳感器在對圖像進行獲取的時候,其精準度非常低,以此導致在捕捉的過程中失真,影響圖片捕捉的效果。 對此,本文則結合自身的研究,提出一種基于特征點的配準算法,并對其實現進行深入分析。
1 三維重建技術的流程
所謂的三維重建是指通過采用計算機圖形學、 人工智能、計算機技術、圖像處理技術等,實現對物理三維模型的重建,以此方便對三維的信息進行識別和認知。 根據相關的經驗總結,三維重建其一般的流程則如圖1 所示。

圖1 三維重建流程Fig. 1 Three-dimensional reconstruction flow
通過圖1 可以看出,在對圖像進行獲取之后,計算機則自動生成點云數據,并對其中的多幀點進行云配準之后,對圖像進行融合,最終生成為相應的三維模型。 文中例舉的重建流程則主要是借鑒和參照中設計的流程,主要包括圖像深度獲取、預處理、點云計算、配準、融合、修正、生成表面等階段。
2 點云配準
通過采用不同視角的深度圖像, 其可獲得不同的點云。但是, 上述的點云其都是基于攝像機自身的坐標系而定的。因此,在對點云進行獲取的過程中,需要進行不同的坐標變換,并將其中的各個不同的坐標系都全部統一到世界坐標系當中。 在對坐標進行變化求解相關變換參數的過程即被稱為配準。 而在進行配準的時候,需借助當前幀和前一幀的相關的點云數據,并將前一點云作為變換的基礎值,對其進行計算,最后得到相關的變化參數。
2.1 算 法
也被成為迭代對應點算法,其具體的過程作為:
輸入待配準點P 和Q, 初始變換參數為Tini: 輸出參數為T。 令Po=P,計數器k=0,通過采用一定的規則可找到離Q 和Pk之間最為近的那個點;計算目標函數的最小值,并得到其相應的Tk和與其對應的誤差Ek;對點云進行更新;如其中的Tk滿足一定的條件,如Ek滿足收斂,則結束迭代,如不滿足,則繼續對其誤差進行計算。 其中,目標函數誤差的表達式為:

其中的E 表示為誤差,T 為變換參數,Pi、Qi分別表示為相應的對應點的集合,N 為對應點的對數。
2.2 變換參數求解
在對算法進行迭代的過程中,通常則采用非線性的最小二乘法對其進行求解,但是,在點云進行查找的過程中,其中的兩個點云其距離非常接近的時候,其可采用線性二乘法得出其相似的非線性最優解。 因此通過上述思路對分析,需要滿足:

其中其平移向量t=(tx,ty,tz)T,而其中的旋轉矩陣則為:

其中Rz(θ3)、Ry(θ2)、Rx(θ1)則分別表示其為繞著z 軸、y軸和x 軸進行旋轉,其角度則分別為括號之中對應的角度。當兩點在較為接近的時候,其中對應的角度則分別趨近于0。 由此可得到其旋轉矩陣的近似值則為:

對此,各對應的運點到其相應的切平面的距離為:
由此,通過對公式(5)進行的矩陣運算可以構造出新的方程(構造過程省略):

通過公式(6)對R、t 的求解,并結合奇異值分解法,可得到該運算的最終求解方程:

同時針對上述的問題分析, 可以得出如果采用手持的的移動速度慢,所以該方法是適用于求解變換參數。
3 基于Kincet 的三維重建配準算法
通過采用ICP 的算法,可實現對其變換參數的求解。而該算法其僅僅只考慮到了其中的兩個不同云點的空間距離,與物體的運動狀態沒有任何的關系。 同時, 當前應用的主流的Kincet 的分辨率為640*480,通過圖1 中的去除背景,則保留下的像素點的數量有限。 而此時如果采用傳統的特征點的方法,則將給系統帶來很大的誤差,對此,文中提出在有限的數量之中,采用分類的方法對其進行改進,其具體的改進流程則如圖2 所示。

圖2 改進后的配準算法Fig. 2 Registration algorithm improved
該改進算法的原理則為首先對基于Kincet 的像素點進行去除背景,在此之后對剩下的點進行分類,最后再利用不同的目標誤差函數進行配準, 而其中所謂的分為則為對圖像當中前一幀和當前幀的云點進行分類,并在該步驟的基礎之上,根據其中云點的不同而選擇不同的目標誤差函數。 而對其類型的劃分通常可以分為planar、linear、scttar 等不同類型。 對此,本文將該算法設計為如下:
第一,構造協方差矩陣M,對該任意點p 的3*3 矩陣的特征值進行計算,并按照降序的方式進行排列,其大小分為表示為λ1,λ2,λ3, 而與上述相對應的單位特征向量則為e1,e2,e3,因此,根據上述的特征值的計算,則可以得到如下的相關參數:

其中上述計算的3 個參數當中,如其中的a1為最大,則將點p 表示為linear;如a2最大,則將p 定義到planar,以此類推。
第二,通過對其變換參數的初始化和對對應點的求解,可得到其目標函數。如果兩個點其都為planar 類型的點,則其目標函數則為:

其中Vwi-1(q)表示為在沒有進行配準前其存在的三維世界坐標。 對此,可將公式(6)變幻為:

最終通過奇異值分解對其求解。
4 結果驗證
通過對上述算法的設計, 文中首先采用視覺對比的方式對圖像的好壞進行評價,而開發工具則采用美國微軟公司開發的Visual Studio 2012,計算機內存為4G,顯卡內存為1G。 在實驗當中國其全局數據立方體中的體素個數為k*k*k,k=512。
通過對圖像3 的重建,則可得到圖像4 的效果,其具體如圖3、圖4 所示。

圖3 對象1Fig. 3 The object 1
同時通過對其實驗誤差的統計, 并將其與傳統的方法進行統計,可以得到如表1 所示的誤差分析結果。
5 結束語
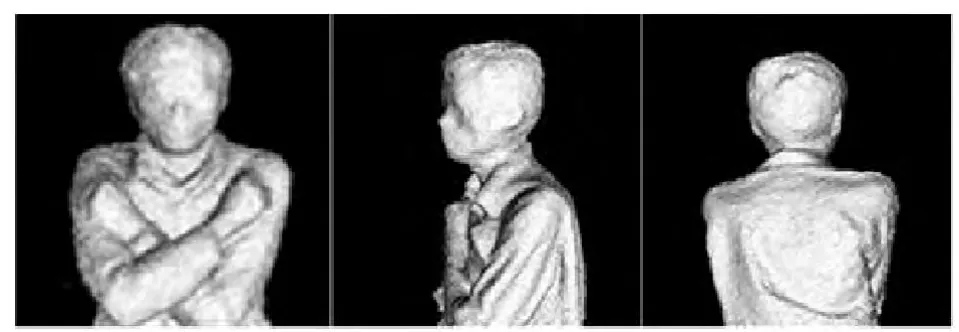
圖4 圖像重建過程Fig. 4 Image reconstruction

表1 實驗誤差情況(mm)Tab. 1 Experimental error (mm)
文中針對在采用傳感器進行深度圖像獲取中, 針對其圖像精準度比較低的問題通過采用分類的方法進行配準算法設計,實現了在視覺效果的增加,減小了誤差,說明該方法具有一定的實用性。
[1] 賈云得. 機器視覺[M]. 北京:科學出版社,2000.
[2] 宋詩超. 基于Kinect的三維人體建模與測量的研究[D]. 上海:東華大學,2013.
[3] 張翠紅. 基于Kinect深度相機的室內三維場景重構[D]. 大連:大連理工大學,2013.
[4] 郭連朋,陳向寧,劉彬,等. 基于Kinect傳感器多深度圖像融合的物體三維重建[J]. 應用光學,2014(5):811-816.GUO Lian-peng,CHEN Xiang-ning,LIU Bin,et al. Multi depth Kinect sensor image fusion in 3D reconstruction based on [J]. Applied Optics,2014(5):811-816.
[5] 楊鴻,錢堃,戴先中,等. 基于Kinect傳感器的移動機器人室內環境三維地圖創建[J]. 東南大學學報:自然科學版,2013(S1):183-187.
YANG Hong,QIAN Kun,DAI Xian-zhong,et al. A 3D map of indoor environment for mobile robot Kinect sensor based on creating[J]. Journal of Southeast University :Natural Science Edition,2013(S1):183-187.
[6] 徐禎琦,龔光紅. 基于Kinect的物體表面重建方法研究[J].中國體視學與圖像分析,2013(3):255-262.
XU Zhen-qi,GONG Guang-hong. Based on surface reconstruction method Kinect[J]. Chinese Stereology,2013(3):255-262.
