分布式全相參雷達(dá)相參性能分析
2015-07-05 16:46:42靖張劍云
電子與信息學(xué)報 2015年1期
關(guān)鍵詞:信號結(jié)構(gòu)
宋 靖張劍云
(電子工程學(xué)院 合肥 230037)
分布式全相參雷達(dá)相參性能分析
宋 靖*張劍云
(電子工程學(xué)院 合肥 230037)
該文針對多脈沖發(fā)射協(xié)同結(jié)構(gòu)的分布式全相參雷達(dá),首先建立了全相參模式下的信號模型,然后推導(dǎo)了輸出信噪比增益(oSNRg)的解析式,并基于相干參數(shù)估計的克拉美-羅界(CRB),利用多項式擬合,獲得了oSNRg上界的數(shù)值解。結(jié)果表明:增加發(fā)射天線數(shù)或脈沖數(shù)能夠提高oSNRg;而增加接收天線數(shù)能否提高oSNRg取決于輸入信噪比大小,輸入信噪比較大時則oSNRg隨之提高,較小時反而隨之下降。最后的仿真實驗驗證了研究結(jié)論的正確性。
雷達(dá);分布式;全相參;輸出信噪比增益;多項式擬合
1 引言
分布式全相參雷達(dá)是繼多輸入多輸出(MIMO)雷達(dá)之后出現(xiàn)的一種新體制雷達(dá),它解決了大口徑雷達(dá)難以機(jī)動部署和造價昂貴等問題,是下一代雷達(dá)發(fā)展的技術(shù)方向。該雷達(dá)的主要特點包括:多部機(jī)動式單元雷達(dá)或天線分散布設(shè),通過對多部雷達(dá)回波進(jìn)行信號級相參合成,等效形成一個大威力探測雷達(dá)。其關(guān)鍵能力包括:具有較高靈敏度,適用于遠(yuǎn)距離搜索、跟蹤和目標(biāo)識別,同時滿足機(jī)動部署能力。分布式全相參雷達(dá)先后工作于兩種典型模式:MIMO模式和全相參模式。首先在MIMO模式下發(fā)射一組正交信號,分別估計出收發(fā)端的相干參數(shù);然后雷達(dá)轉(zhuǎn)換到全相參模式,發(fā)射一組相同信號,利用估計的相干參數(shù)分別對收發(fā)端進(jìn)行精確補(bǔ)償和控制,從而實現(xiàn)收發(fā)全相參。全相參模式是其所獨有的常態(tài)化模式,是MIMO雷達(dá)所不具備和無法實現(xiàn)的。根據(jù)收發(fā)天線數(shù)配置不同,分布式全相參雷達(dá)主要分為主輔(master-slave)和協(xié)同(cooperative)結(jié)構(gòu),前者僅利用一部單元雷達(dá)接收信號,所需處理數(shù)據(jù)量小;而后者利用全部單元雷達(dá)接收信號,能夠獲得更好的相干參數(shù)估計性能。
國外主要是美國林肯實驗室對該技術(shù)做了大量研究[1- 5]。國內(nèi)目前對該技術(shù)的研究尚屬起步階段,但是其潛在優(yōu)勢和應(yīng)用前景已引起各大高校和研究所的關(guān)注[6- 11]。文獻(xiàn)[5]定義了全相參模式下輸出信噪比增益(output Signal-to-Noise Ratio gain, oSNRg),但未能研究其解析式。文獻(xiàn)[6,7]研究了時間和相位同步問題,以及相位差跟蹤技術(shù)。文獻(xiàn)[8]介紹了技術(shù)背景和發(fā)展現(xiàn)狀。文獻(xiàn)[9]針對收發(fā)天線分置的一般結(jié)構(gòu),考慮單脈沖發(fā)射,推導(dǎo)了相干參數(shù)估計的克拉美-羅界(Cramer-Rao Bound, CRB)閉式解,并基于CRB分析了相參處理性能。文獻(xiàn)[10]針對主輔結(jié)構(gòu),將單脈沖拓展到多脈沖,研究了相干參數(shù)估計和相參處理性能。文獻(xiàn)[11]針對部分收發(fā)共置,首先建立了“全發(fā)任意收”的混合結(jié)構(gòu),它是包含主輔結(jié)構(gòu)和協(xié)同結(jié)構(gòu)的更一般結(jié)構(gòu),然后在發(fā)射多脈沖條件下推導(dǎo)了相干參數(shù)估計CRB閉式解,但是未能進(jìn)一步分析相參處理性能。值得指出的是,MIMO雷達(dá)參數(shù)估計已得到學(xué)術(shù)界廣泛關(guān)注[12- 17],盡管其與分布式全相參雷達(dá)參數(shù)估計問題相似,但是二者存在本質(zhì)區(qū)別:首先,待估的目標(biāo)參數(shù)不同,在前者中常見的有位置和速度估計,而在后者中需要估計的是各天線間時延差和相位差等相干參數(shù);其次,待估目標(biāo)參數(shù)數(shù)目與收發(fā)天線數(shù)的關(guān)系不同,在前者中往往一定,而在后者中隨收發(fā)天線數(shù)的增加而增加;最后,針對相位參數(shù)的處理方式也不同,在前者中通常被看作隨機(jī)變量,而在后者中則作為確定性未知參量,是需要估計和補(bǔ)償?shù)闹匾獏?shù)。
相干參數(shù)估計是實現(xiàn)各單元雷達(dá)間相參處理的前提,但并非最終目的。相參性能分析是分布式全相參雷達(dá)的一個重要問題。本文針對協(xié)同結(jié)構(gòu)的分布式全相參雷達(dá),在多脈沖發(fā)射條件下,研究了收發(fā)天線數(shù)及脈沖數(shù)對相參性能的影響。首先建立了MIMO模式和全相參模式下的分布式全相參雷達(dá)信號模型;然后推導(dǎo)了oSNRg的解析式,并基于文獻(xiàn)[11]獲得的相干參數(shù)估計CRB,利用多項式擬合獲得oSNRg上界的數(shù)值解。
2 信號模型
2.1 MIMO模式信號模型
由K個發(fā)射天線,L(1≤L≤K)個接收天線和1個處理中心組成的混合結(jié)構(gòu)的分布式全相參雷達(dá)[11]如圖1所示,其中接收天線與部分發(fā)射天線共置。顯然,若L=1則為主輔結(jié)構(gòu),L=K則為協(xié)同結(jié)構(gòu)。假設(shè)發(fā)射一組正交窄帶信號經(jīng)上變頻,發(fā)射信號復(fù)包絡(luò)可表示為sk(t) ej2πfc t+jφkt,其中fc為載頻,為發(fā)射天線Tk的初始相位。
假設(shè)空間存在一個各向同性散射點目標(biāo),且確定性復(fù)散射系數(shù)為ξ。目標(biāo)相對于各單元雷達(dá)的距離變化率為常數(shù),且在觀測時間內(nèi)不離開雷達(dá)距離分辨單元。定義R˙k和Rk,0分別為目標(biāo)相對于第k部雷達(dá)的距離變化率和初始距離,則第n個脈沖時刻,目標(biāo)相對于第k部雷達(dá)的距離可表示為Rk, n=Rk ,0其中N為發(fā)射脈沖總數(shù)。對于第lk個收發(fā)路徑,第n個脈沖的傳播時間可表示為

圖1 混合結(jié)構(gòu)的分布式全相參雷達(dá)

式中,φlr為接收天線Rl的初始相位,φlk=2πfcTR˙lk/c為第lk個路徑的多普勒頻移,wln(t)為Rl接收第n個脈沖的噪聲。假設(shè)wln(t)是空間和時間獨立的,且wln
(t)在時域上是均值為零、方差為σw2的復(fù)白高
斯過程。τlk,0,τk
t,0和τlr,0分別寫作τlk,τkt和τlr。選定(T/R)1為發(fā)射或接收參考天線,且定義ξ=從而式(2)可改寫為
2.2 全相參模式信號模型
假設(shè)雷達(dá)由MIMO模式轉(zhuǎn)換到全相參模式時,相干參數(shù)估計是穩(wěn)健的。定義各相干參數(shù)估計值為相位和多普勒頻移補(bǔ)償后,Tk發(fā)射的第n個脈沖經(jīng)上變頻可表示為

同理,在接收端經(jīng)補(bǔ)償后,Rl接收的第n個脈沖經(jīng)過下變頻可表示為

3 相參性能分析
3.1 oSNRg解析式
選擇大時寬帶寬積的線性調(diào)頻信號作為發(fā)射信號,經(jīng)脈沖壓縮后可表示為

式中B為信號帶寬。根據(jù)式(6)可知,在τ11時刻的樣本信號具有最大平均功率,因此不含噪聲的樣本信號的平均功率Pso可表示為
為簡化分析過程并給出直觀有用的結(jié)論,只考慮協(xié)同結(jié)構(gòu)的oSNRg。由于L=K,因此根據(jù)式(8),協(xié)同結(jié)構(gòu)的輸出平均功率

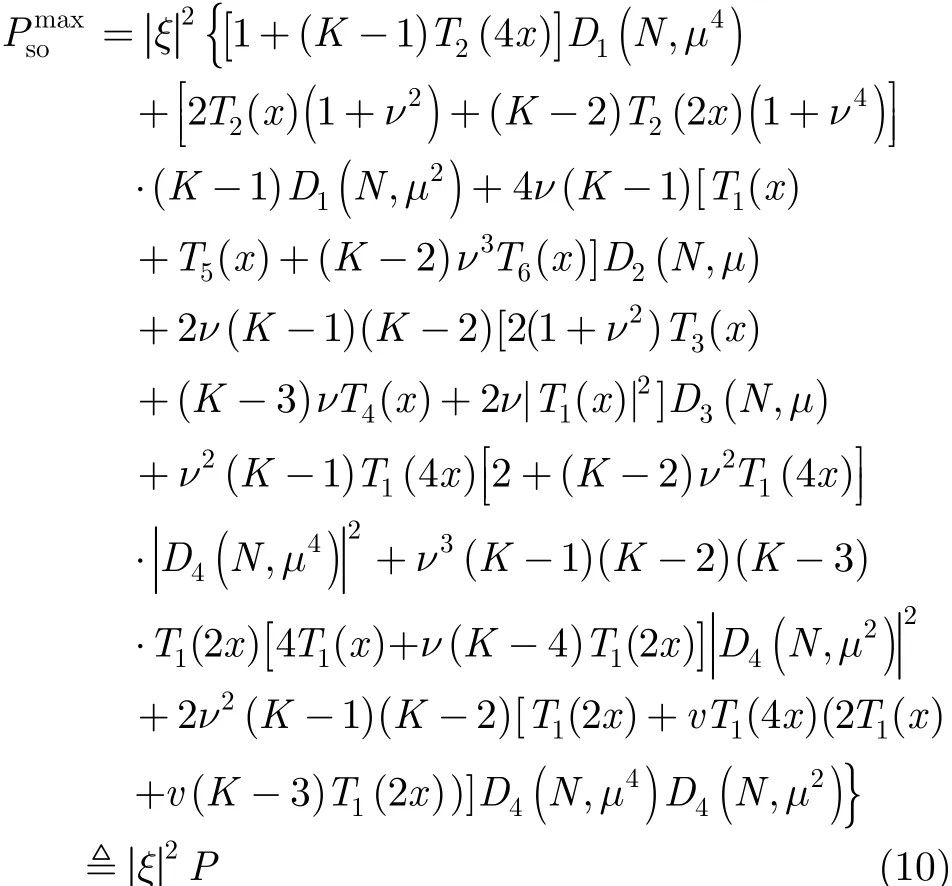

若無特別說明,下文中“oSNRg”均指其上界。根據(jù)式(11)可得以下結(jié)論:
K和N。
(3)相比于相位差和多普勒頻移,高精度的時延差估計更容易獲得。當(dāng)且K為發(fā)射天線數(shù)(仿真實驗圖4說明這一點)。
主輔和協(xié)同結(jié)構(gòu)是分布式全相參雷達(dá)的兩種典型結(jié)構(gòu),將主輔[10]和協(xié)同結(jié)構(gòu)的oSNRg對比列于表1。由表1可知:較主輔結(jié)構(gòu),協(xié)同結(jié)構(gòu)由于利用全部K個天線接收信號,所以當(dāng)時,其oSNRg提高K倍;當(dāng)時,其oSNRg下降至1/K;當(dāng)兩者均為K,且K為發(fā)射天線數(shù)。

表1 主輔與協(xié)同結(jié)構(gòu)對應(yīng)的oSNRg
3.2 oSNRg數(shù)值解

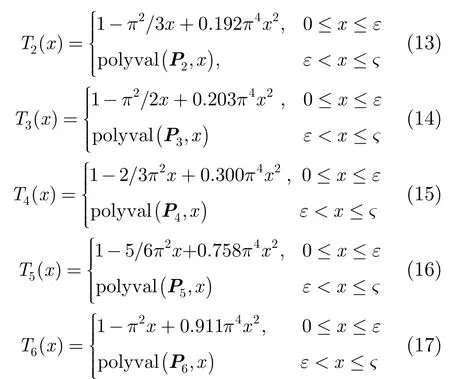
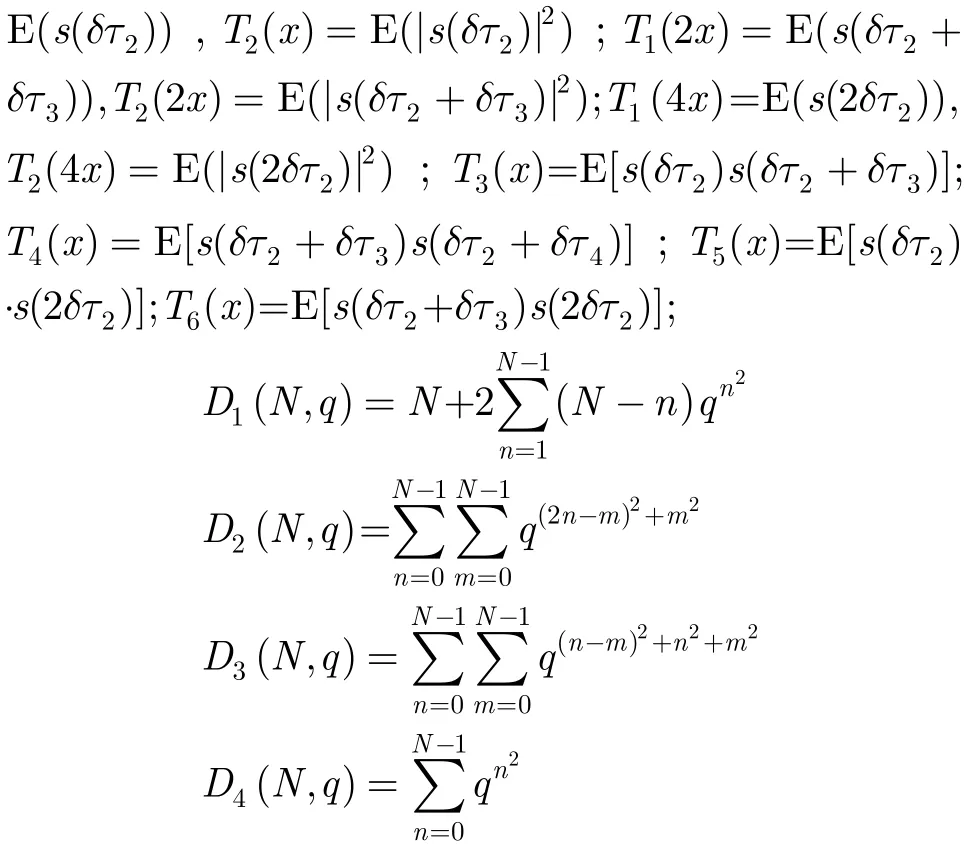
根據(jù)式(7)可知,s( δτ2)的泰勒展開式為可用低階泰勒展開式近似表示,否則基于蒙特卡洛仿真,利用多項式擬合近似表示。具體地,式(12)~式(17)中,polyval表示多項式求值運(yùn)算,ε 和?分別為擬合區(qū)間的下界和上界,仿真實驗中分別取0.02和50。Pi(i=1,2,…,6)為擬合系數(shù)向量,由實驗獲得(實驗中最高階數(shù)取25)。同理,T1(2x)(或T1(4x))和T2(2x)(或T2(4x))分別代入式(12)和式(13)即可獲得對應(yīng)的表達(dá)式。
4 仿真結(jié)果與分析
實驗1 N不同時對應(yīng)的oSNRg
選擇B=100 MHz, SNRin=-22~30 dB, N = [1,4,8], K=2。當(dāng)min(SNRin)=-22 dB , min( N) =1時,x滿足3.2節(jié)的擬合區(qū)間要求。
圖2展示了時延補(bǔ)償誤差對協(xié)同結(jié)構(gòu)oSNRg的影響:當(dāng)SNRin越小時,影響越顯著;相比于N=1, N=4(或N=8)對應(yīng)的理想oSNRg提高6 dB(或9 dB)。
考慮時延補(bǔ)償誤差時,對比協(xié)同與主輔結(jié)構(gòu)的oSNRg,如圖3所示。由圖3可知,在同一N時,協(xié)同結(jié)構(gòu)的理想oSNRg較主輔結(jié)構(gòu)提高3 dB(或2 倍);當(dāng)SNRin較低時,由于采用單天線接收,所以主輔結(jié)構(gòu)的oSNRg趨于0 dB,而協(xié)同結(jié)構(gòu)由于采用2個天線接收,所以其oSNRg趨于-3 dB(或者1 2)。根據(jù)圖3,對比協(xié)同與主輔結(jié)構(gòu)的oSNRg,以N=1為例,當(dāng)SNRin>-9 dB 時,前者大于后者;當(dāng)SNRin<-9 dB 時,前者小于后者。盡管多天線接收能夠提高相干參數(shù)估計精度,但是引入的噪聲功率也與接收天線數(shù)成正比,所以從提高oSNRg的角度考慮,并不是接收天線越多越有利,而是決定于SNRin閾值。此外隨著N的增加,由于相干參數(shù)估計精度提高,對應(yīng)的SNRin閾值降低。
實驗2 K不同時對應(yīng)的oSNRg
選擇N=2, SNRin=-25~30 dB , B=100 MHz,K=[2,4,8]。同理,當(dāng)min(SNRin)=-25 dB, min(K)=2時,x滿足3.2節(jié)的擬合區(qū)間要求。
不考慮時延補(bǔ)償誤差,圖4展示了協(xié)同與主輔結(jié)構(gòu)的oSNRg隨SNRin的變化曲線。由圖4可知,在同一K時,協(xié)同結(jié)構(gòu)的理想oSNRg較主輔結(jié)構(gòu)提高K倍;當(dāng)SNRin趨于無窮小時=∞),兩者趨于一致,且等于K。
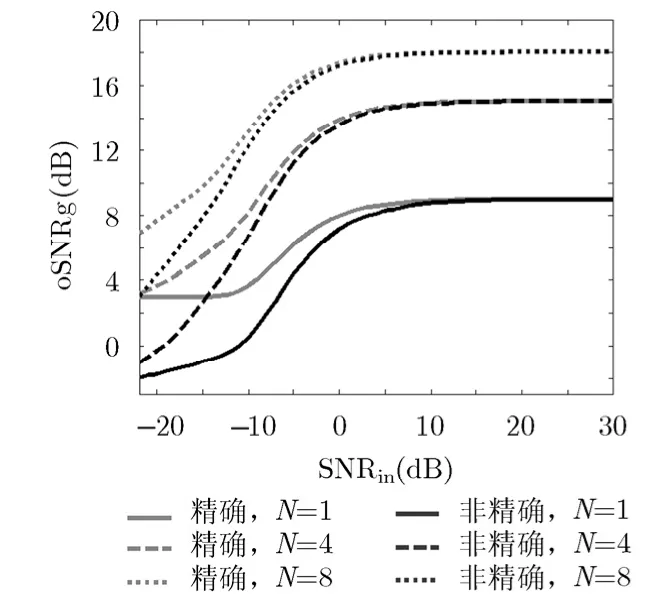
圖2 時延補(bǔ)償精確與否對oSNRg的影響
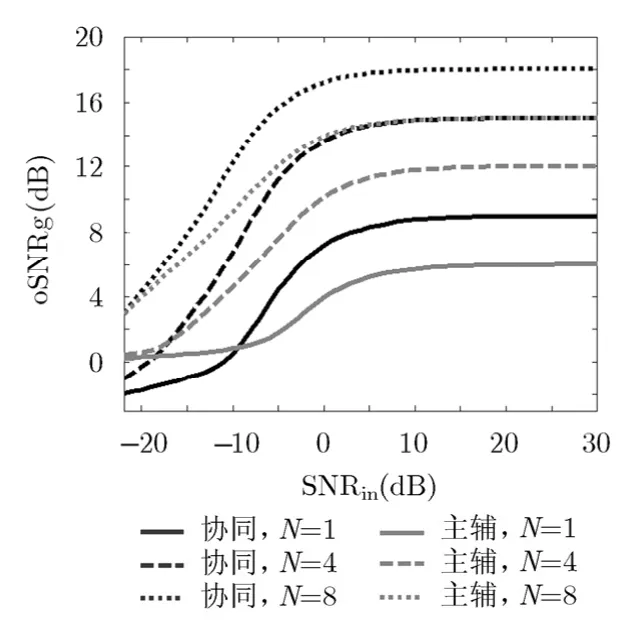
圖3 不同脈沖數(shù)對應(yīng)的oSNRg 隨SNRin的變化曲線
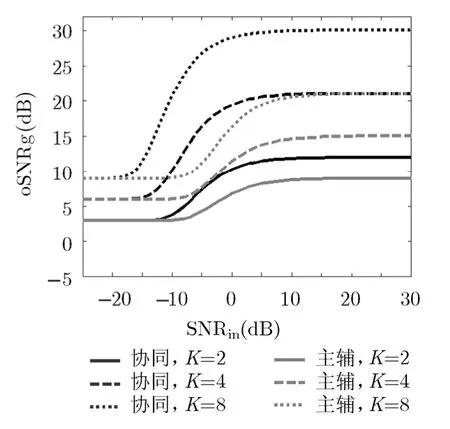
圖4 時延精確補(bǔ)償時的oSNRg 隨SNRin的變化曲線
考慮時延補(bǔ)償誤差時,圖5展示了協(xié)同與主輔結(jié)構(gòu)oSNRg隨SNRin的變化曲線。結(jié)論與圖3類似,且隨著K的增加,對應(yīng)的SNRin閾值降低。特別地,在SNRin∈[-25,30] dB 時,主輔結(jié)構(gòu)對應(yīng)的oSNRg隨著發(fā)射天線數(shù)K的增加而提高。
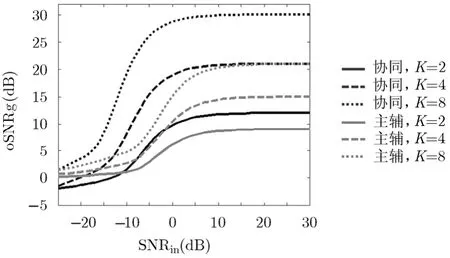
圖5 不同發(fā)射天線數(shù)對應(yīng)的oSNRg隨SNRin的變化曲線
5 結(jié)束語
oSNRg是衡量分布式全相參雷達(dá)性能的重要指標(biāo)。本文針對多脈沖發(fā)射協(xié)同結(jié)構(gòu)的分布式全相參雷達(dá),考慮時延、相位和多普勒頻移補(bǔ)償誤差同時存在時,推導(dǎo)了oSNRg的解析式,并基于相干參數(shù)估計CRB獲得oSNRg的數(shù)值解。理論和實驗結(jié)果表明,oSNRg隨著脈沖數(shù)或發(fā)射天線數(shù)的增加而提高。然而增加接收天線數(shù)能否提高oSNRg取決于輸入信噪比大小:輸入信噪比較大時,oSNRg隨接收天線數(shù)增加而提高,輸入信噪比較小時,oSNRg隨接收天線數(shù)增加反而下降。本文主要基于相干參數(shù)估計CRB獲得了輸出信噪比增益的上界。為更好地指導(dǎo)實際工程應(yīng)用,下一步將結(jié)合具體的相干參數(shù)估計算法和輸出信噪比增益,研究分布式全相參雷達(dá)的相參處理性能。
[1] Ahlgren G W. Next generation radar concept definition team final report[R]. MIT Lincoln Laboratory, 2003.
[2] Cuomo K M, Coutts S D, McHarg J C, et al.. Wideband aperture coherence processing for next generation radar (NexGen)[R]. MIT Lincoln Laboratory, 2004: 11-16.
[3] Coutts S D, Cuomo K M, McHarg J C, et al.. Distributed coherent aperture measurements for next generation BMD radar[C]. Fourth IEEE Workshop on Sensor Array and Multichannel Processing, Walthma, MA, USA, 2006: 390-393.
[4] Brookner E. Phased-array and radar astounding breakthroughs-an update[C]. IEEE Radar Conference, Boston, MA, USA, 2007: 37-42.
[5] Fletcher A and Robey F. Performance bounds for adaptive coherence of sparse array radar[C]. 11th Conference Adaptive Sensors Array Processing, MIT Lincoln Laboratory, Lexington, MA, USA, 2003: 290-293.
[6] 曾濤, 殷丕磊, 楊小鵬, 等. 分布式全相參雷達(dá)系統(tǒng)時間與相位同步方案研究[J]. 雷達(dá)學(xué)報, 2013, 2(1): 105-110. Zeng Tao, Yin Pi-lei, Yang Xiao-peng, et al.. Time and phase synchronization for distributed aperture coherent radar[J]. Journal of Radars, 2013, 2(1): 105-110.
[7] 殷丕磊, 楊小鵬, 曾濤. 分布式全相參雷達(dá)的相位差跟蹤技術(shù)[J]. 信號處理, 2013, 29(3): 313-318. Yin Pi-lei, Yang Xiao-peng, and Zeng Tao. Tracking technology of phase difference for distributed aperture radar [J]. Journal of Signal Processing, 2013, 29(3): 313-318.
[8] Gao Hong-wei, Cao Zhe, Wen Shu-liang, et al.. Study on distributed aperture coherence synthesizing radar with several experiment results[C]. IEEE Radar Conference, Xi’an, China, 2011: 84-86.
[9] Sun P L, Tang J, He Q, et al.. Cramer-Rao bound of parameters estimation and coherence performance for next generation radar[J]. IET Radar, Sonar & Navigation, 2013,7(5): 553-567.
[10] Tang X W, Tang J, He Q, et al.. Cramer-Rao bounds and coherence performance analysis for next generation radar with pulse trains[J]. Sensor, 2013, 13(1): 5347-5367.
[11] 宋靖, 張劍云, 鄭志東, 等. 分布式全相參雷達(dá)相干參數(shù)估計性能[J]. 電子與信息學(xué)報, 2014, 36(8): 1926-1931. Song Jing, Zhang Jian-yun, Zheng Zhi-dong, et al.. Coherent parameters estimation performance for distributed aperture coherent radar[J]. Journal of Electronics & Information Technology, 2014, 36(8): 1926-1931.
[12] Godrich H, Haimovich A M, and Blum R S. Target localization accuracy gain in MIMO radar-based systems[J]. IEEE Transactions on Information and Theory, 2010, 56(6): 2783-2802.
[13] He Q, Blum R S, Godrich H, et al.. Target velocity estimation and antenna placement for MIMO radar with widely separated antennas[J]. IEEE Journal of Selected Topics in Signal Processing, 2010, 4(1): 79-100.
[14] He Q, Blum R S, and Haimovich A M. Noncoherent MIMO radar for location and velocity estimation: more antennas means better performance[J]. IEEE Transactions on Signal Processing, 2010, 58(7): 3661-3680.
[15] Wei C M, He Q, and Blum R S. Cramer-Rao bound for joint location and velocity estimation in multi-target non-coherent MIMO radars[C]. Proceedings of 44th Conference on Information Science Systems, Princeton, NJ, USA, 2010: 1-6. [16] He Q and Blum R S. Cramer-Rao bound for MIMO radar target localization with phase errors[J]. IEEE Signal Processing Letters, 2010, 17(1): 83-86.
[17] Godrich H and Haimovich A M. Localization performance of coherent MIMO radar systems subject to phase synchronization errors[C]. Proceeding of Fourth ISCCSP, Limassol, Cyprus, 2010: 1-5.
宋 靖: 男,1986年生,博士生,研究方向為MIMO雷達(dá)信號處理及分布式雷達(dá)技術(shù).
張劍云: 男,1963年生,教授,博士生導(dǎo)師,研究方向為雷達(dá)及目標(biāo)環(huán)境模擬、雷達(dá)信號處理、高速信號處理.
Coherence Performance Analysis for Distributed Aperture Coherent Radar
Song Jing Zhang Jian-yun
(Electronic Engineering Institute, Hefei 230037, China)
For distributed aperture coherent radar with cooperative architecture and pulse trains, the signal mode in fully coherent work mode is proposed firstly. Then the analysis formula of output Signal-to-Noise Ratio gain (oSNRg) is derived, and the performance bound of oSNRg is developed by using polynomial fitting based on Cramer-Rao Bounds (CRB) of coherence parameters estimation. It is concluded that more transmitters or pulses make higher oSNRg. However, as the number of receivers increase, if the input SNR is high sufficiently, the oSNRg will gradually improve; if not, it will worsen. Finally, numerical examples demonstrate the validity of the theoretical results.
Radar; Distributed aperture; Fully coherent; Output Signal-to-Noise Ratio gain (oSNRg); Polynomial fitting
TN958
A
1009-5896(2015)01-0009-06
10.11999/JEIT140202
2014-02-17收到,2014-07-23改回
國家自然科學(xué)基金(60702015)資助課題
*通信作者:宋靖 songjingpla@163.com
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50