充氣伸長型氣動柔性驅動器的動態特性研究
2015-07-01 23:57:47高帥滕燕李小寧
機械制造與自動化 2015年5期
高帥,滕燕,李小寧
(南京理工大學 機械工程學院,江蘇 南京 210094)
充氣伸長型氣動柔性驅動器的動態特性研究
高帥,滕燕,李小寧
(南京理工大學 機械工程學院,江蘇 南京 210094)
研究建立了充氣伸長型氣動柔性驅動器的靜動態數學模型,并進行了試驗研究。結果表明:氣動柔性驅動器充氣階段腔內壓力的平穩性受慣性負載和外力負載的影響,慣性負載和外力負載越大,壓力平穩性越差。外力負載是影響氣動柔性驅動器位移輸出的主要因素,外力負載越大,位移越小。研究結果為氣動柔性驅動器的控制提供了理論依據。
氣動柔性驅動器;動態特性;動態模型
氣動柔性驅動器又稱氣動人工肌肉,具有與生物肌肉相似的特性,可產生很強的收縮力,并且柔順性好、安全性高,在醫療康復領域具有廣闊的應用前景。近年來,人們利用傳統的Mckibben型氣動肌肉開發出了一些關節柔順康復訓練裝置,并對Mckibben型氣動肌肉的動態特性進行了研究,以期實現對關節康復訓練裝置的準確控制[1-4]。但由于Mckibben型氣動人工肌肉的行程較短,一定程度上限制了這一類康復器的推廣與應用。技術中心前期研發了一種充氣伸長型氣動柔性驅動器[5],它由初始截面為扁平狀的彈性橡膠管以及套在橡膠管外的纖維編織網經螺旋纏繞而構成,如圖1所示,當向彈性橡膠管內充氣時,橡膠管膨脹并沿軸向產生變形,對外輸出力和位移。這種氣動柔性驅動器具有行程長、推力大的特點。基于該氣動柔性驅動器,進一步研發了具有雙向柔性的膝關節主-被動康復訓練裝置[6]。作為該膝關節康復訓練裝置的末端執行器,對充氣伸長型氣動柔性驅動器的準確控制將極大地影響著膝關節的康復效果和患者的舒適程度,而準確把握其動態特性是實現對其精確控制的前提。
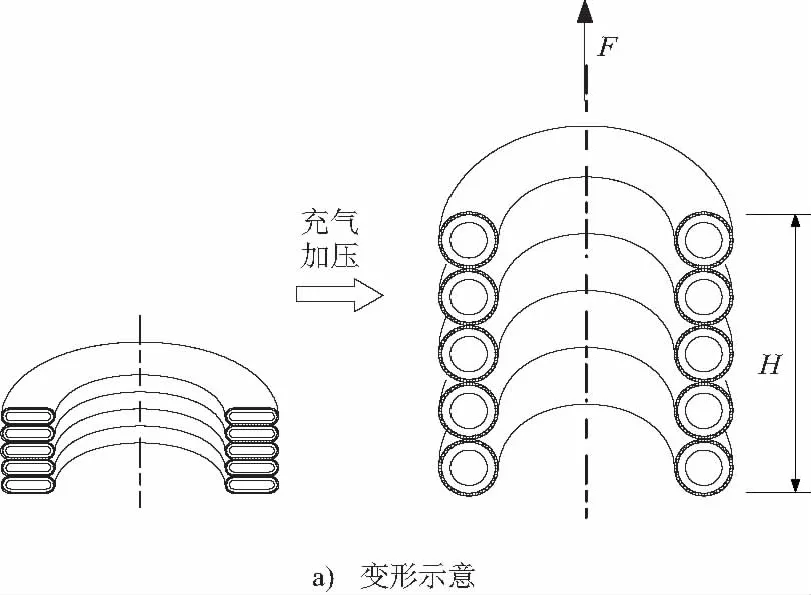
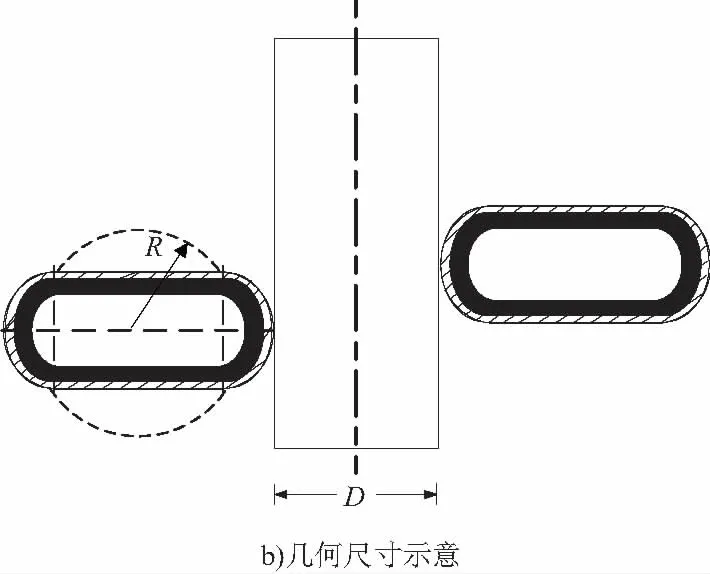
圖1 氣動柔性驅動器的工作原理示意
1 靜態模型
在文獻[7]的研究基礎上,考慮氣動柔性驅動器充氣伸長時彈性橡膠管的彈性力以及纖維編織網與彈性橡膠管之間的摩擦力,引入氣動柔性驅動器伸長長度校正系數Kp,并定義:
(1)
其中:Hmax為氣動柔性驅動器理論伸長的最大長度,mm;Hp為氣動柔性驅動器實際伸長的最大長度,mm。
則充氣伸長型氣動柔性驅動器的靜態輸出力模型為:
(2)
其中:F為驅動器輸出力,N;
λ氣動柔性驅動器的能量轉化效率(由試驗確定);
p為供氣壓力,MPa;
H為柔性驅動器的工作長度,mm;
N為彈性管的層數;
R為螺旋管膨脹至圓形時的外圈半徑,mm;
K為螺旋管的半徑變化率;
D為導向桿直徑,mm。
2 動態模型
圖2為充氣伸長型氣動柔性驅動器控制系統框圖,主要由控制器、比例壓力閥、氣動柔性驅動器、負載以及反饋元件等組成。
在進行動態建模分析時,做以下幾點假設:1) 系統與外界無質量和熱量交換;2) 氣源壓力穩定,氣源溫度為環境溫度;3) 所有氣體均為理想氣體。
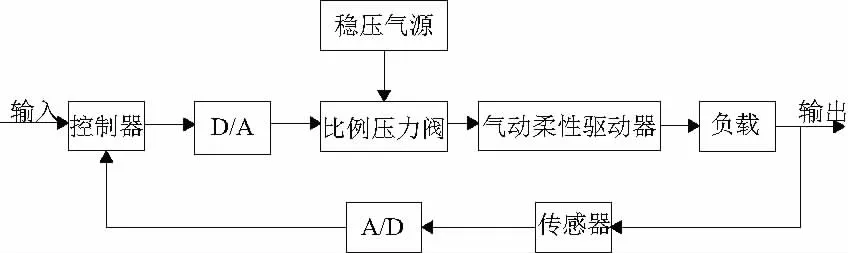
圖2 氣動柔性驅動器控制系統框圖
2.1 壓力特性方程
圖3為充氣伸長型氣動柔性驅動器充放氣示意圖,H0為加壓前氣動柔性驅動器自由狀態下的長度,H為加壓后氣動柔性驅動器的長度,x為氣動柔性驅動器的位移。則氣動柔性驅動器充氣伸長時H=H0+x,放氣收縮時H=H0-x。
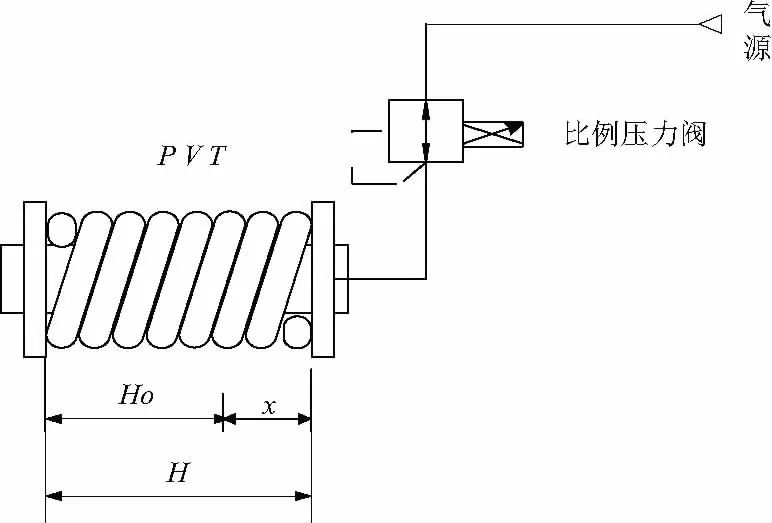
圖3 氣動柔性驅動器充放氣示意
根據能量守恒定律,將式(2)寫成:
(3)
變換之后,得到 :
(4)
由式(4)可以得到氣動柔性驅動器的等效作用面積:
(5)
又知氣動柔性驅動器的容積為:
(6)
則氣動柔性驅動器充氣伸長時有:
(7)
氣動柔性驅動器放氣收縮時有:
(8)
其中:Qm1為氣源流入氣動柔性驅動器的質量流量,m3/s;
Qm2為氣動柔性驅動器向大氣排氣的質量流量,m3/s;
k為絕熱指數;
R為氣體常數;
T為環境溫度,K;
V為氣動柔性驅動器的體積,mm3;

x為氣動柔性驅動器的位移,mm。
2.2 流量特性方程
設比例壓力閥的節流口面積為AT,流量系數為Cd,節流口的下游壓力為p,上游壓力為p0,臨界壓力比為b,得出氣體的質量流量為:
(9)
式中臨界壓力比b為:
(10)
2.3 負載平衡特性方程
氣動柔性驅動器在充氣伸長時負載的平衡特性方程為:
(11)
氣動柔性驅動器在排氣收縮時負載的平衡特性方程為:
(12)
其中:m為氣動柔性驅動器和慣性負載的等效質量,kg;
u為摩擦系數;
α為粘性阻尼系數;
g為重力加速度,m/s2;
FL為外力負載,N;
其余符號同前。
3 仿真和試驗研究
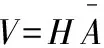
圖4為氣動柔性驅動器動態特性試驗臺的主要組成示意,采用質量塊作為慣性負載(0.5kg、1kg),采用加載氣缸施加恒定的外力負載(10N、20N),比例壓力閥用于調節氣體壓力。
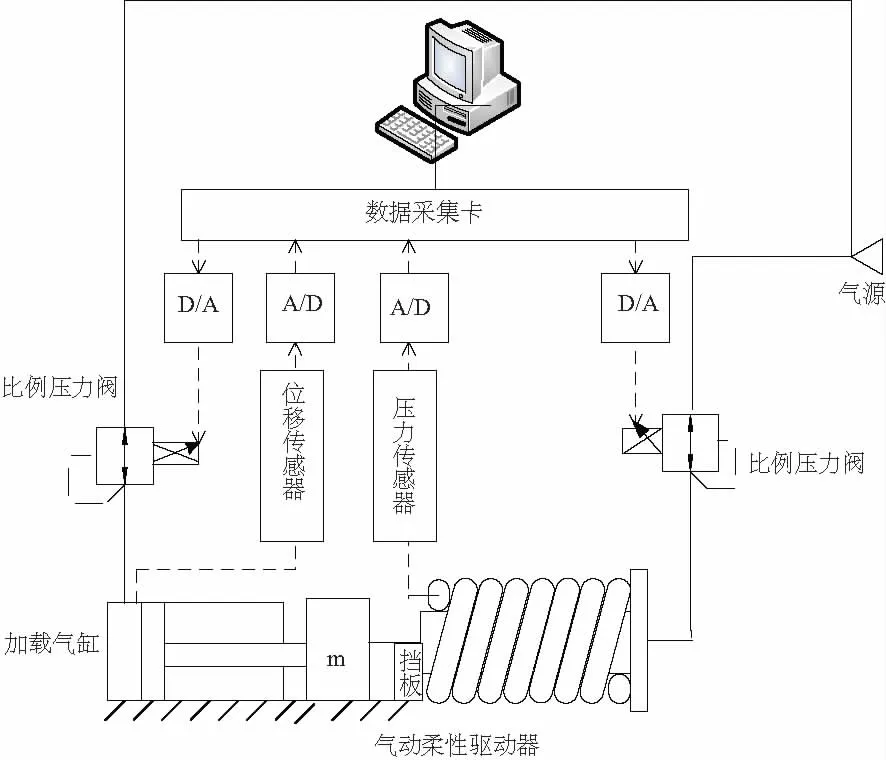
圖4 試驗臺主要組成示意
圖5-圖7分別給出了3種不同負載組合情況下氣動柔性驅動器控制系統的仿真及試驗曲線。可以看出,仿真和試驗曲線基本吻合,說明所建立的數學模型的準確性。
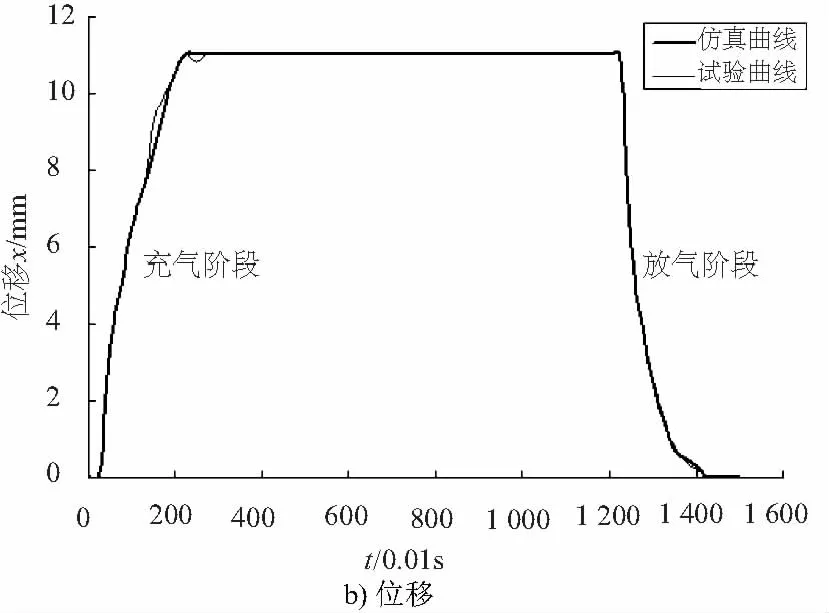
圖5 氣動柔性驅動器控制系統仿真及試驗曲線 (負載0.5 kg,10 N)
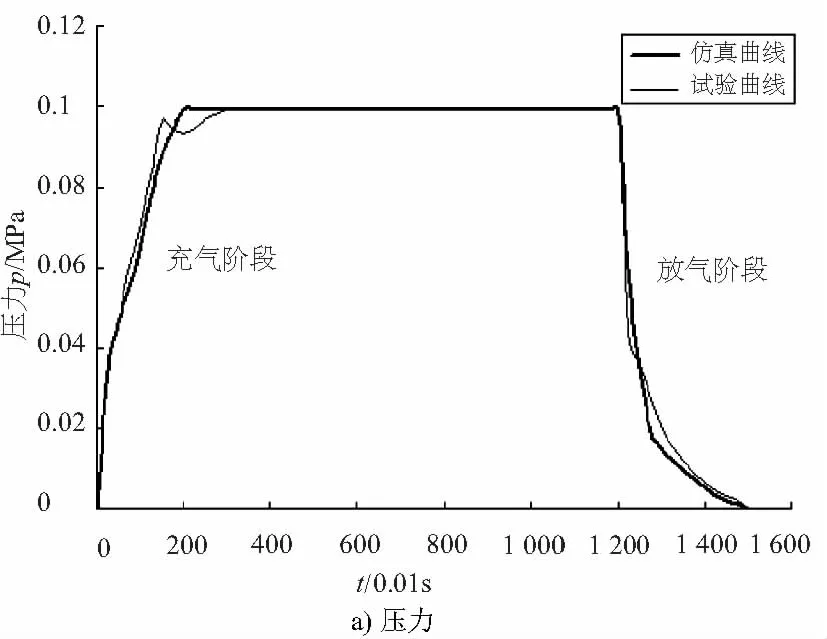

圖6 氣動柔性驅動器控制系統仿真及試驗曲線 (負載0.5 kg,20 N)
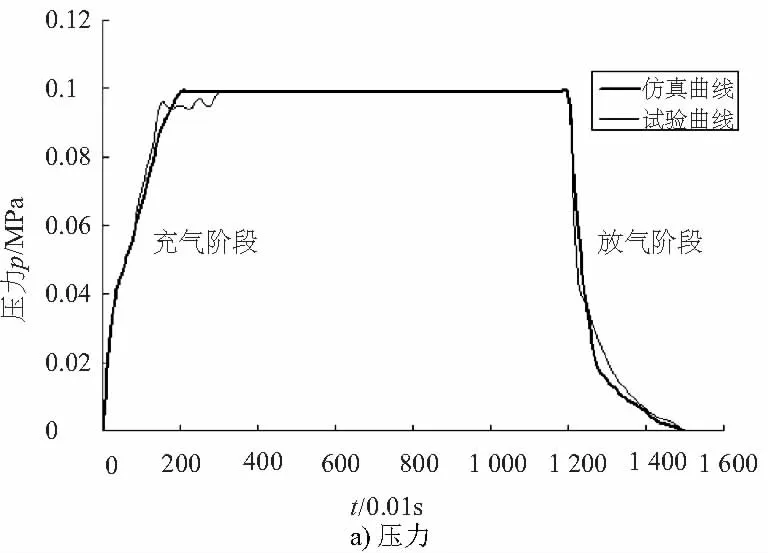
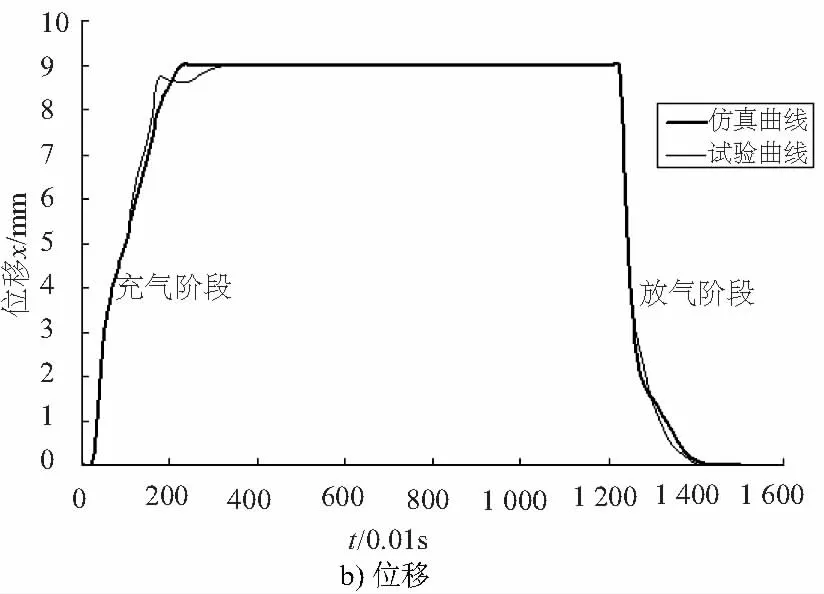
圖7 氣動柔性驅動器控制系統仿真及試驗曲線 (負載1 kg,20 N)
對比分析圖5(a)-圖7(a)可以看出,充氣階段,氣動柔性驅動器腔內壓力隨時間增加迅速上升,當輸出力等于外力負載時,氣動柔性驅動器的壓力瞬間減小,產生波動。慣性負載和外力負載越大,壓力波動越明顯。放氣階段中,外力負載越大,壓力下降越快,而慣性負載的影響較小。
對比分析圖5(b)-圖7(b)可以看出,充氣階段,氣動柔性驅動器的位移主要取決于外力負載,慣性負載的影響較小,試驗中,慣性負載為0.5kg、外力負載為10N時的位移可以達到11mm左右,而在慣性負載為0.5kg、外力負載為20N時的位移只有9mm左右。另外,橫向對比圖5-圖7的(a)和(b),在放氣階段中,當氣動柔性驅動器位移恢復至初始位置時,腔內仍有部分殘余壓力,導致腔內壓力大于大氣壓力。
4 結語
研究建立了充氣伸長型氣動柔性驅動器系統的靜態和動態數學模型,并進行了仿真和試驗研究,結果表明,仿真和試驗曲線具有良好的吻合度,說明所建動態模型的正確性。慣性負載和外力負載都會對氣動柔性驅動器充氣階段的腔內壓力的平穩性產生影響,慣性負載和外力負載越大,壓力平穩性越差。氣動柔性驅動器的位移輸出主要取決于外力負載,外力負載越大,位移越小。研究結果為氣動柔性驅動器的動態過程控制和實際應用提供了理論依據。
[1] 楊鋼,李寶仁, 傅曉云. 氣動人工肌肉系統動態特性研究[J]. 中國機械工程,2006,17(12):1294-1298.
[2] 何國昆, 劉吉軒, 張振營. 氣動人工肌肉的動態驅動特性研究[J]. 西安交通大學學報,2008,42(5):588-591.
[3] M. Tóthová, A. Ho?ovsk. Dynamic simulation model of pneumatic actuator with artificial[C]. IEEE 11th International Symposium on Applied Machine Intelligence and Informatics, Slovakia, 2013:47-51.
[4] 劉吉軒, 謝增. 氣動人工肌肉驅動器的動態跟隨控制研究[J]. 流體傳動與控制,2010,2(39):34-37.
[5] 李小寧, 滕燕, 楊罡,等. 充氣伸長型氣動柔性驅動器:中國, 201010146317.8 [P]. 2010-04-14.
[6] 李小寧, 滕燕, 楊罡,等. 雙向柔性的膝關節主-被動康復訓練裝置:中國, 201010146310.6 [P]. 2010-04-14.
[7] 滕燕, 楊罡, 李小寧, 等. 推力大行程氣動柔性驅動器及其特性[J]. 南京理工大學學報,2011,35(4):502-506.
Study of Dynamic Characteristic of Elongation Type Pneumatic Compliance Actuator
GAO Shuai,TENG Yan,LI Xiaoning
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
In this paper, the static and dynamic mathematical model of elongation type pneumatic compliance actuator is developed, and experimental study is made. The experimental result shows that the pressure stability of pneumatic compliance actuator is affected by inertia loads and external forces, and the larger the inertia loads and external forces are, the worse the pressure stability is. The external force is the main factor affecting the displacement of pneumatic compliance actuator, and the larger external load has the small influence on the displacement. The study results lay the theoretical foundation for the control of elongation type pneumatic compliance actuator.
pneumatic compliance actuator; dynamic characteristic; dynamic model
國家自然科學基金(510752131)
高帥(1988-),男,江蘇徐州人,碩士研究生,研究方向:膝關節康復機器人。
TH138
A
1671-5276(2015)05-0209-03
2014-03-03