液壓挖掘機虛擬樣機建模與作業(yè)過程動態(tài)仿真
2015-07-01 23:57:54羅君揚林述溫
機械制造與自動化 2015年5期
羅君揚,林述溫
(福州大學(xué) 機械工程及自動化學(xué)院,福建 福州 350108)
液壓挖掘機虛擬樣機建模與作業(yè)過程動態(tài)仿真
羅君揚,林述溫
(福州大學(xué) 機械工程及自動化學(xué)院,福建 福州 350108)
利用參數(shù)化設(shè)計軟件Pro/E完成了液壓挖掘機的參數(shù)化建模,對模型進行了虛擬裝配,得到了虛擬樣機模型,通過對液壓挖掘機虛擬樣機進行運動仿真分析,有助于理解和分析實際機械裝置運動過程,并提供相應(yīng)的改進機構(gòu)設(shè)計的信息。
液壓挖掘機;參數(shù)化建模;運動學(xué)仿真
液壓挖掘機在工業(yè)與民用建筑、道路建設(shè)、水力、礦山、市政工程等土石方施工中均占有重要位置,并反映了這些行業(yè)的施工機械化水平,是交通運輸、能源開發(fā)、城鎮(zhèn)建設(shè)以及國防施工等各項工程建設(shè)的重要施工設(shè)備,是國民經(jīng)濟建設(shè)迫切需要的裝備。重視和加速挖掘機改進創(chuàng)新,穩(wěn)定提高產(chǎn)品品質(zhì),滿足用戶需求,對加速現(xiàn)代化工程建設(shè)有著重大的意義[1-3]。
挖掘機的設(shè)計水平關(guān)系到最終產(chǎn)品的品質(zhì),而設(shè)計過程中技術(shù)的先進與否、數(shù)字化程度的高低,很大程度上決定了機械產(chǎn)品設(shè)計開發(fā)的周期、品質(zhì)和成本。在工程設(shè)計中已得到廣泛應(yīng)用的計算機輔助技術(shù)就是這些先進技術(shù)的代表。現(xiàn)利用計算機輔助設(shè)計技術(shù),建立液壓挖掘機各部件參數(shù)化模型,并對模型進行了虛擬裝配,得到了虛擬樣機模型,通過對液壓挖掘機虛擬樣機作業(yè)工況進行運動仿真分析,檢查運動中的干涉,以驗證設(shè)計的合理性及可行性。
1 液壓挖掘機工作裝置的運動分析
液壓挖掘機的工作裝置是采用連桿機構(gòu)的原理,而各部分的運動通過液壓缸的伸縮來實現(xiàn)的,從而完成挖掘作業(yè)。其中,動臂與動臂油缸組成動臂連桿機構(gòu)(簡稱動臂機構(gòu)),斗桿與斗桿油缸組成斗桿連桿機構(gòu)(簡稱斗桿機構(gòu)),鏟斗與鏟斗油缸及連桿機構(gòu)組成鏟斗連桿機構(gòu)(簡稱鏟斗機構(gòu)),各部分之間采用銷軸鉸接方式。工作裝置的幾何位置取決于動臂液壓缸的長度L1、斗桿液壓缸的長度L2和鏟斗液壓缸的長度L3。顯然L1、L2和L3為某一組確定值時工作裝置就相應(yīng)處于一個確定的幾何位置。液壓挖掘機工作裝置幾何參數(shù)簡圖如圖1所示,設(shè)計平面直角坐標系,使x軸與地平面重合,y軸與挖掘機回轉(zhuǎn)中心線重合。則斗齒尖V所在的x坐標值xV就表示挖掘半徑,y坐標值yV為正值時就表示挖掘高度,為負值時表示挖掘深度[1]。
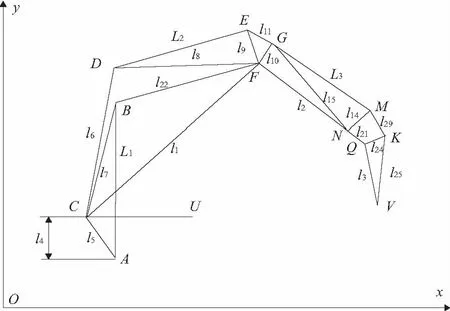
圖1 液壓挖掘機工作裝置幾何參數(shù)簡圖
1.1 動臂的運動
從圖1可知,動臂擺角∠UCF是動臂油缸L1的函數(shù)。動臂上任意一點在任一時刻的位置坐標也都是L1的函數(shù)。
動臂的擺角∠UCF
α=∠UCA=53.12°
(1)
∠ACU=α/180×π
(2)
(3)
∠BCU=∠ACB-∠ACU
(4)
(5)
∠UCF=∠BCU-∠BCF
(6)
F點瞬時位置坐標:
XFC=l1×cos(∠UCF)
(7)
XF=XC+XFC
(8)
YFC=l1×sin(∠UCF)
(9)
YF=YC+YFC
(10)
1.2 斗桿的運動
斗桿的位置參數(shù)是動臂油缸L1和斗桿油缸L2的函數(shù)。這里暫先討論斗桿相對于動臂的運動,也即只考慮L2的影響。
斗桿相對于動臂的擺角∠CFQ:
(11)
(12)
(13)
(14)
l16=l2-l21
(15)
∠GFQ=∠GFN
(16)
∠CFQ=2π-∠CFD-∠DFE-∠EFG-∠GFQ
(17)
N點瞬時位置坐標:
∠CFN=∠CFQ
(18)
(19)
(20)
∠UCN=∠UCF-∠NCF
(21)
XN=XC+lCN×cos(∠UCN)
(22)
YN=YC+lCN×sin(∠UCN)
(23)
1.3 鏟斗的運動
鏟斗的運動是動臂油缸L1、斗桿油缸L2和鏟斗油缸L3的函數(shù),情況較復(fù)雜。這里暫討論鏟斗相對于斗桿的運動。
鏟斗相對于斗桿的擺角∠FQV:
∠NQK=2π-∠MNQ-∠NMK-∠MKQ
(24)
(25)
∠FQV=∠MNQ+∠NMK+∠MKQ-∠KQV
(26)
Q點瞬時位置坐標:
(27)
(28)
∠UCQ=∠UCF-∠QCF
(29)
XQ=XC+lCQ×cos(∠UCQ)
(30)
YQ=YC+lCQ×sin(∠UCQ)
(31)
V點坐標:
由圖1以及前面計算公式,利用幾何關(guān)系可以依次求得∠CQV,lCV,∠VCQ,∠UCV等值。
XV=XC+lCV×cos(∠UCV)
(32)
YV=YC+lCV×sin(∠UCV)
(33)
斗齒尖V的坐標值XV和YV是L1、L2和L3的函數(shù)。根據(jù)式(32)、式(33),就可以確定整機的作業(yè)范圍,當液壓缸長度L1、L2和L3為一組定值時,只有一組XV和YV與其對應(yīng)。
2 Pro/E中液壓挖掘機參數(shù)化模型的建立
文中以Pro/E為支撐平臺,進行液壓挖掘機的三維參數(shù)化設(shè)計。因篇幅所限,這里僅列出動臂、斗桿和鏟斗等復(fù)雜零件的三維實體參數(shù)化模型,如圖2所示。

圖2 動臂、斗桿和鏟斗的參數(shù)化模型
3 液壓挖掘機的虛擬裝配
要建立液壓挖掘機虛擬樣機,需對其各個參數(shù)化模型進行虛擬裝配。在Pro/E的裝配模塊中,通過確定零件之間的位置約束關(guān)系,可以把液壓挖掘機中的各個三維實體零件裝配成一個整體[4]。得到挖掘機虛擬樣機后,可以檢查各零件之間是否有干涉以及裝配體的運動情況是否合乎設(shè)計要求。如果出現(xiàn)問題,可以根據(jù)需要對生成的零件和特征進行修改定義,直到達到挖掘機設(shè)計要求為止。
在進行虛擬樣機裝配時,采用按照挖掘機各鉸接點“連接”約束方式進行裝配:回轉(zhuǎn)機架和挖掘機底座的連接、動臂和回轉(zhuǎn)機架的連接、動臂與斗桿的連接、斗桿與鏟斗的連接、動臂液壓缸缸筒與回轉(zhuǎn)機架的連接、連桿與斗桿的連接、液壓缸缸桿與動臂的連接等均采用“銷軸”約束;液壓缸缸桿與液壓缸缸筒的連接、搖桿與鏟斗的連接、連桿與搖桿的連接采用“圓柱”和“銷軸”約束。最終完成的液壓挖掘機虛擬樣機(由于課題主要研究液壓挖掘機作業(yè)過程,因此對挖掘機的行走裝置、未進行詳細建模,在此以底座替代),如圖3所示。

圖3 液壓挖掘機虛擬樣機模型
4 液壓挖掘機作業(yè)范圍及整個作業(yè)過程仿真
液壓挖掘機反鏟裝置包括動臂、斗桿、鏟斗及相應(yīng)的三組驅(qū)動液壓缸,其結(jié)構(gòu)與具有臂、關(guān)節(jié)和末端執(zhí)行器的機械手十分相似,因此,可以利用確定機械手工作空間的方法來確定挖掘機工作裝置的作業(yè)空間。目前,確定機械手工作空間的方法主要有解析法、圖解法、數(shù)值法和仿真法[5-7]。仿真法具有直觀性強,通用性好,修改方便等優(yōu)點,所以采用仿真法來確定液壓挖掘機作業(yè)范圍。
液壓挖掘機作業(yè)范圍可分成9個部分,見圖4。圓弧ab為鏟斗油缸動作,挖掘軌跡以鏟斗與斗桿的鉸點Q為中心,當工作裝置的鉸點C,Q和鏟斗斗尖V處在一直線上時,工作裝置的伸出長度最大。圓弧bc為動臂油缸動作,挖掘軌跡以機身與動臂的鉸點為中心,在圓弧bc上可得到最大挖掘半徑R0max和停機面最大挖掘半徑R1max。圓弧cd為鏟斗油缸動作,挖掘軌跡以鏟斗與斗桿的鉸點為中心,斗尖V處在點d時,工作裝置的鉸點F,Q和鏟斗斗尖V處在一直線上的狀態(tài)。圓弧de為斗桿油缸動作,挖掘軌跡以斗桿與動臂的鉸點F為中心,在圓弧de上可得到最大挖掘深度h3max。圓弧ef為鏟斗油缸動作,斗尖V處在點f時,鉸點C、斗尖V和鉸點Q處在一直線上的狀態(tài),挖掘軌跡以鏟斗與斗桿的鉸點Q為中心,在弧ef上可得到最小挖掘半徑。圓弧fg為動臂油缸和鏟斗油缸的復(fù)合動作,此時動臂油缸的長度由最小逐級變?yōu)樽畲螅P斗油缸在最小和最大間不斷作往返運動。圓弧gh為鏟斗油缸的動作,斗尖V處在點h時,動臂、斗桿和鏟斗油缸的長度為最大。圓弧hi為斗桿油缸的動作,斗桿油缸的長度由最大為最小。圓弧ia為鏟斗油缸的動作,鏟斗油缸的長度由最大為最小,在圓弧ia可得到最大卸載高度h2max,點a為最大挖掘高度h1max。

圖4 液壓挖掘機作業(yè)范圍
經(jīng)過挖掘作業(yè)范圍進行運動仿真,得到該挖掘機的最大挖掘半徑(2407mm)、最大挖掘深度(889mm)、停機面最大挖掘半徑(2317mm)、最大卸載高度(1098mm)和最大挖掘高度(1588mm)等主要工作性能尺寸,與設(shè)計要求的工作性能尺寸基本相符,從而可證明該模型的建立和虛擬仿真是正確的。
液壓挖掘機整個挖掘作業(yè)過程仿真如圖5所示。

圖5 整個挖掘作業(yè)過程的運動仿真
通過對液壓挖掘機挖掘作業(yè)范圍以及整個挖掘作業(yè)過程進行運動仿真,校驗了設(shè)計的液壓挖掘機各構(gòu)件無干涉現(xiàn)象,工作裝置結(jié)構(gòu)參數(shù)設(shè)計合理,性能可以滿足作業(yè)要求。
液壓挖掘機虛擬樣機運動仿真的實現(xiàn),結(jié)束了挖掘機設(shè)計的分析和評估只能在物理樣機上進行的歷史,開創(chuàng)了一條新的挖掘機設(shè)計的途徑:計算機三維設(shè)計——虛擬樣機分析——設(shè)計評估及改進——小批量生產(chǎn)——批量生產(chǎn)。這樣不僅使挖掘機的設(shè)計效率和可靠性明顯提高,也為企業(yè)產(chǎn)品的早日上市和提前盈利爭取了時間。
5 結(jié)語
通過液壓挖掘機虛擬樣機的運動仿真分析,成功的對液壓挖掘機挖掘作業(yè)范圍以及整個作業(yè)過程進行了動態(tài)模擬、干涉檢查。對液壓挖掘機工作循環(huán)過程的正確性,各構(gòu)件的干涉情況,設(shè)計的合理性進行了初步驗證;大大簡化了液壓挖掘機的設(shè)計開發(fā)過程,為液壓挖掘機的設(shè)計和改進提供了參考依據(jù)。
[1] 同濟大學(xué). 單斗液壓挖掘機[M]. 第二版. 北京:中國建筑工業(yè)出版社, 1986.
[2] 王宗君. 加速挖掘機改進創(chuàng)新促進挖掘機生產(chǎn)企業(yè)的振興和發(fā)展[J]. 建筑機械, 1998, (5):30-33.
[3] 陳正利. 我國液壓挖掘機發(fā)展的幾個重要階段及前景展望[J]. 建筑機械, 1999, (1):17-23.
[4] 祝凌云, 李斌. Pro/Engineer運動學(xué)仿真和有限元分析[M]. 北京:人民郵電出版社, 2004.
[5] 蔡蒂, 謝存禧, 張鐵, 等. 基于蒙特卡洛法的噴涂機器人工作空間分析及仿真[J]. 機械設(shè)計與制造,2009, (3):161-162.
[6] 趙燕江, 張永德, 姜金剛, 等. 基于 Matlab 的機器人工作空間求解方法[J]. 機械科學(xué)與技術(shù), 2009, (12):1657-1661.
[7] 張鵬程, 張鐵. 基于包絡(luò)法六自由度工業(yè)機器人工作空間的分析[J]. 機械設(shè)計與制造, 2010, (10):164-166.
Modeling and Dynamic Simulation for Virtual Prototype of Hydraulic Excavator
LUO Junyang, LIN Shuwen
(College of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350108, China)
This paper uses Pro/E software to develop the parameter model of the hydraulic Excavator and conduct the virtual assembly, and then complete its virtual prototype. By the kinematics simulation, it conduces to comprehend and analyses the actual process of the mechanical motion and provides the information for improving the structure design.
hydraulic excavator; parametric modeling; kinematics simulation
羅君揚(1975-),男, 福建福州人, 實驗師,碩士,研究方向: CAD/CAM/CAE。
TP391.9
B
1671-5276(2015)05-0105-03
2014-03-03
猜你喜歡
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30