直推式液壓泥炮國產化研究與分析
2015-06-24 14:27:40趙自強付光勇
冶金設備 2015年3期
趙自強 惠 展 付光勇 趙 博
(中鋼集團西安重機有限公司 陜西西安710201)
直推式液壓泥炮國產化研究與分析
趙自強①惠 展 付光勇 趙 博
(中鋼集團西安重機有限公司 陜西西安710201)
某鋼廠4747m3高爐使用的一種直推式液壓泥炮,其回轉機構采用了回轉油缸一端固定在機架上,另一端直接驅動轉臂轉動的四桿機構形式,這一類型液壓泥炮減少了桿機構的數量,結構簡單,檢修維護方便,目前主要依靠從國外進口。根據泥炮設計原則結合該型泥炮的數學模型,給出了桿機構的設計參數,提出了設計方案。該方案合理可行,對此類型泥炮的國產化設計制造具有指導意義。
煉鐵高爐 液壓泥炮 四桿機構 方案設計
1 前言
目前國內生產制造的液壓泥炮其回轉機構在結構設計中均采用了六桿機構的形式。某鋼廠新1號4747m3高爐使用的液壓泥炮(以下簡稱泥炮)其回轉機構采用了回轉油缸一端固定在機架上,另一端直接驅動轉臂轉動的四桿機構形式[1]。這種設計減少了桿機構的數量,結構簡單,便于組裝;整機設備重量減輕,制造成本相對降低;占地面積小,方便用戶檢修維護。目前該類設備主要依靠進口,而進口設備價格高,訂貨手續繁雜、交貨周期長,為了解決這些問題實現該設備國產化,根據鋼廠提供的高爐資料數據,給出了設計方案。
2 設備組成及機構分析
如圖1所示,該泥炮由打泥機構、回轉機構、調整桿、斜底座、液壓系統等組成。將泥炮機構簡化為如圖2所示平面桿系。該桿系由兩個四桿機構疊加而成:其中用于實現整個泥炮回轉動作的機構由:回轉油缸DE(油缸缸體、活塞桿最大行程時長度為DE′)、旋臂AE、機架AD組成;用于實現回轉過程中打泥機構的姿態控制,確定炮嘴軌跡的四桿機構由:打泥機構LK、旋臂AJ、調整桿GH、機架AG組成。其中點A、D、G為固定鉸接點。E、H、J為活動鉸接點。
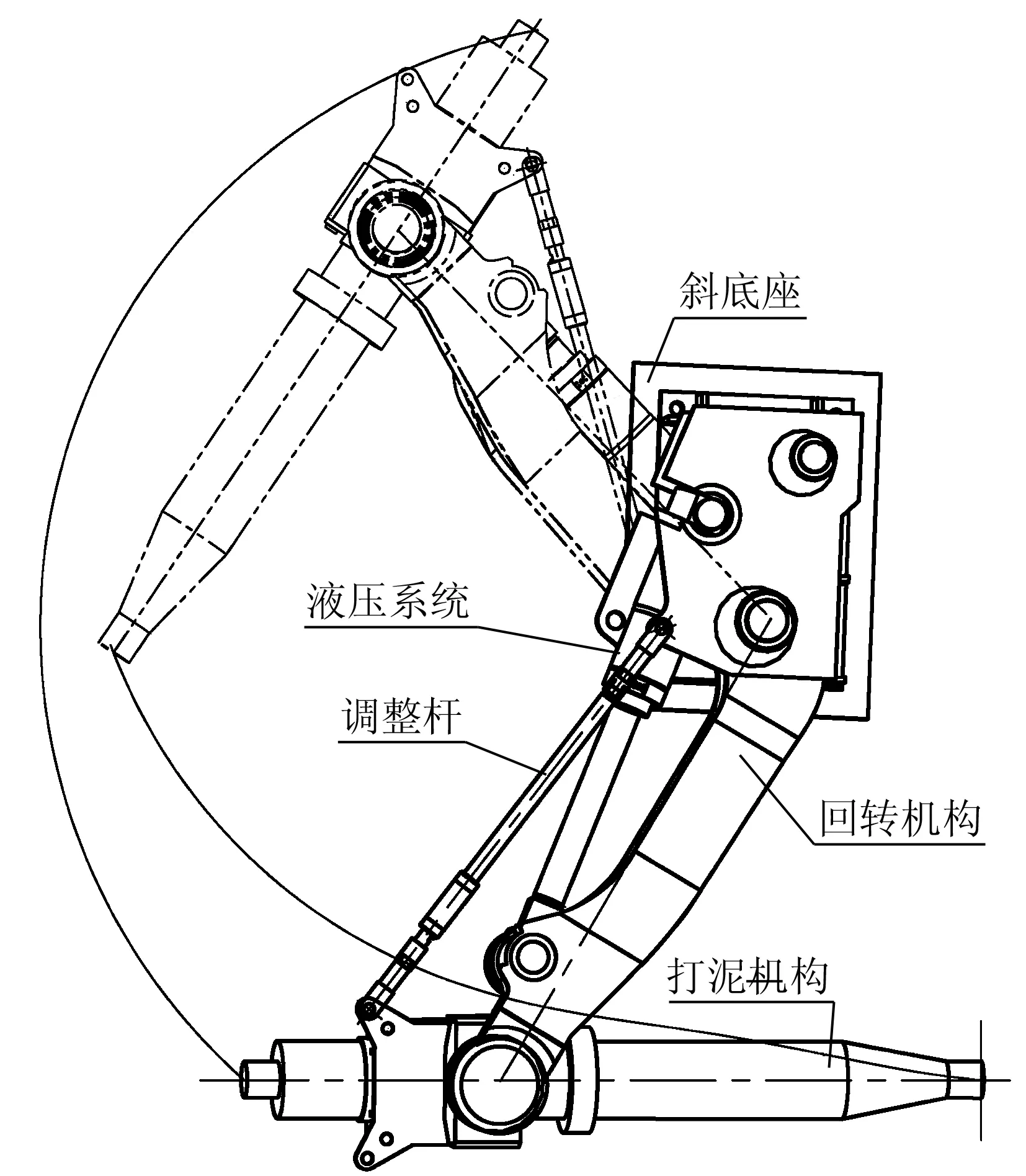
圖1 TMT 直推式液壓泥炮
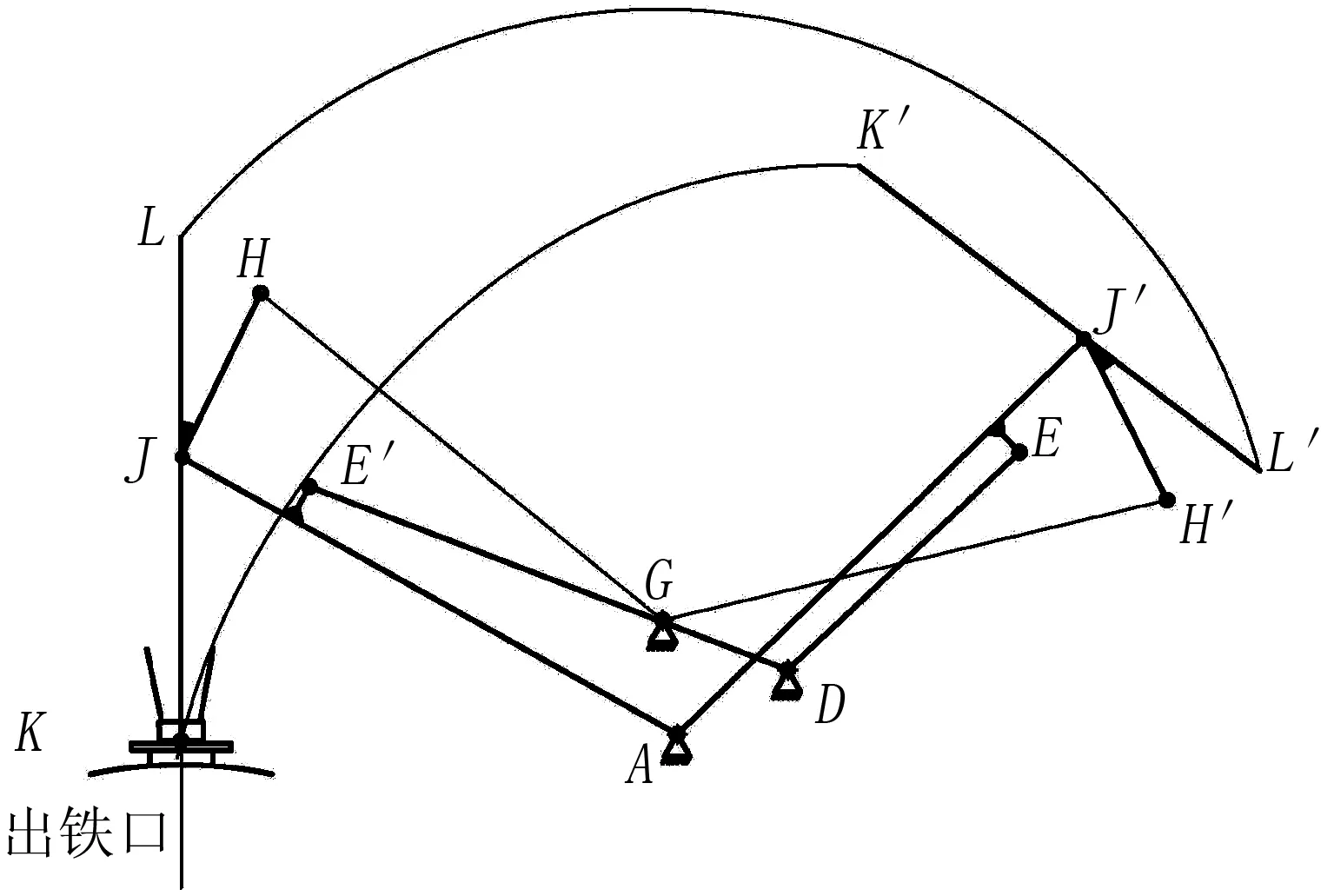
圖2 泥炮的簡化平面桿系
3 泥炮方案設計中的總體思路及注意事項
炮嘴軌跡和壓炮力是泥炮正常工作的重要參數,泥炮在設計時各桿件尺寸的選取,應保證炮嘴軌和壓炮力合理并滿足以下要求:
1)桿機構自由度唯一且在運動過程中不出現死點;
2)炮嘴在接近鐵口的過程中,軌跡直線段(一般取靠近鐵口0mm~500mm段考慮)要明顯,避免與鐵口框和鐵溝壁干涉。
3)泥炮在壓炮狀態時,機構提供的壓炮力大于打泥反力20kN~30kN;旋轉油缸的活塞桿最大受力要小,以減少油缸的直徑。
4)泥炮在待機位置時盡量使K′點遠離出鐵口。
5)泥炮回轉過程中轉臂與炮身的夾角(圖3中的β角)大于50°,以保證旋臂與炮身不干涉。
6)泥炮在待機位置時,油缸相對于A點(轉臂鉸接點)的力矩要大,保證油缸外形尺寸與旋臂不干涉;油缸在3MPa左右的工作壓力下,泥炮回轉機構能夠啟動。
7)回轉油缸的行程要小,以減少油缸的長度,避免在轉臂最大轉角時回轉油缸端部和炮身相碰。
8)桿機構的輪廓尺寸要小,以避免泥炮的基礎與高爐的水箱相碰。
4 油缸活塞桿的受力分析及選取
回轉機構采用活塞式油缸為推動力,泥炮壓炮時壓炮反力通過有關的桿件和回轉油缸的活塞桿,傳到泥炮基礎上,此時回轉油缸活塞桿的受力最大。泥泡在打泥過程中,雖然增加了對炮身的打泥反力,但這時泥套與炮嘴間的壓緊力以與打泥反力相同的數量減少,所以,活塞桿的受力在打泥前和打泥過程中是不變的。
如忽略桿件銷軸的摩擦阻力,壓炮時活塞桿的受力P1可由式(1)求出(圖3):
P1=P×L×cosδ×sinβ/(R×sinθ+M×cosθ)
(1)
式中P—最大打泥力;L—轉臂的長度;δ—壓炮時炮身與水平面所成的傾角;β—轉臂與炮身的夾角;R—轉臂與回轉油缸的鉸接點至旋轉軸的距離;
M—回轉油缸的鉸接點至旋臂的距離;
θ—回轉油缸與旋臂之間的位置角。

圖3 旋轉桿機構受力簡圖
桿機構中各桿件尺寸參數的大小,對油缸活塞行程、活塞桿最大受力以及桿機構的輪廓尺寸都有較大的影響。液壓系統壓力確定后,打泥力、炮身傾角、轉臂長度可視為定值。當給定各桿件尺寸參數時,可由式(1)計算出活塞桿的最大受力。
實際應用中要求P1提供的壓炮力大于打泥力20kN~30kN為合理。
以6000kN打泥力泥炮為例,給定參數
P=6000kN,L=3860mm,δ=10°,β=60°,R=3000mm,M=250mm,θ=8.5°。
可得活塞桿的受力P1,并選取油缸缸徑φ320mm,活塞桿直徑φ220mm。[2]
5 回轉油缸行程和轉臂轉角γ的關系
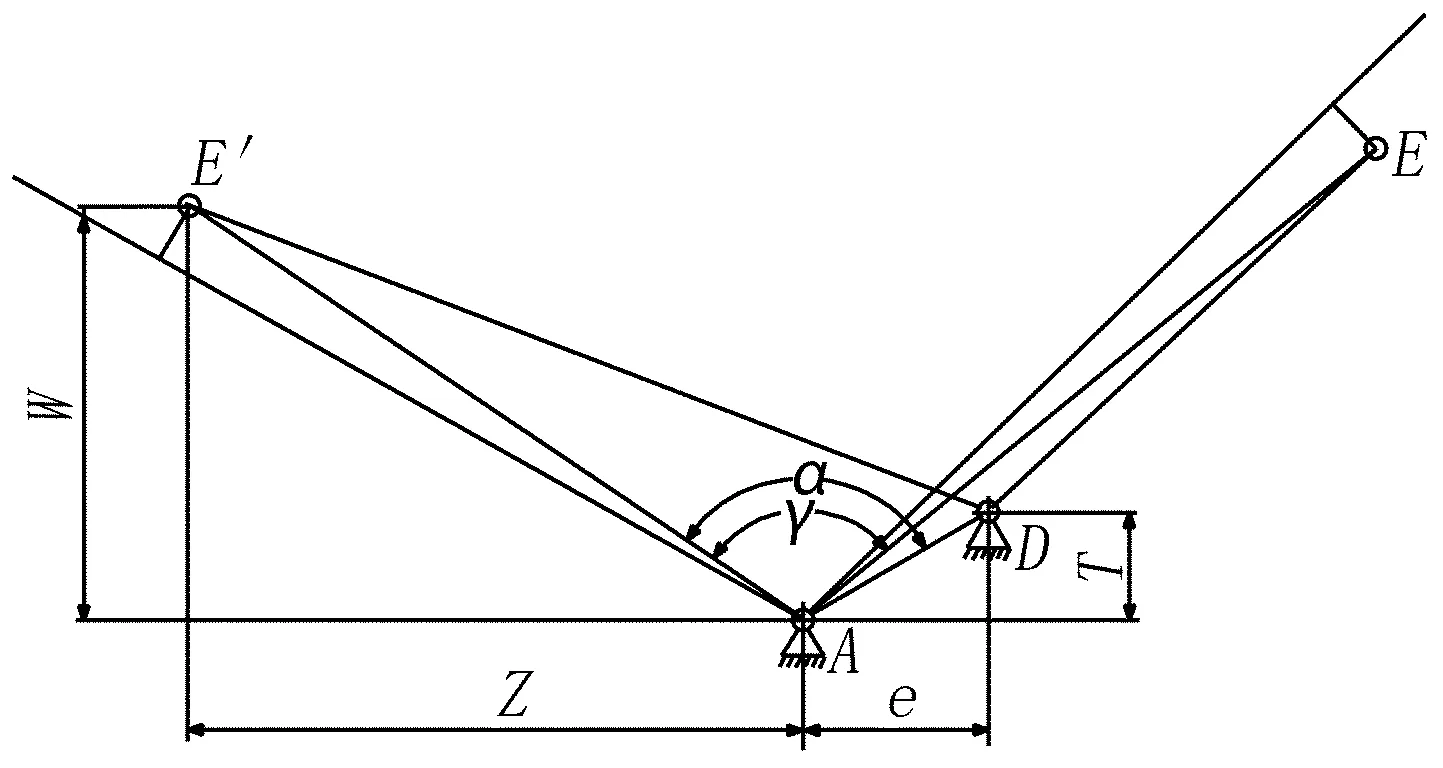
圖4 轉臂轉角與回轉油缸行程關系
如圖4所示,泥炮在壓炮狀態時,回轉油缸與轉臂的鉸接點為E′,當旋臂轉過γ角后,E′點移至E位置,活塞桿行程為:

(2)
其中

(3)
由(3)式導出:

(4)
當液壓泥炮的尺寸參數一定時,利用(2)、(4)兩式可求出轉臂在任意轉角時,旋轉油缸的行程。
由W=1700mm,e=751mm,Z=3510mm,T=438mm。
求得α=123.8°
按公式計算出的轉臂轉角和油缸行程的關系如表1,轉臂旋轉時角速度的變化情況如圖5。
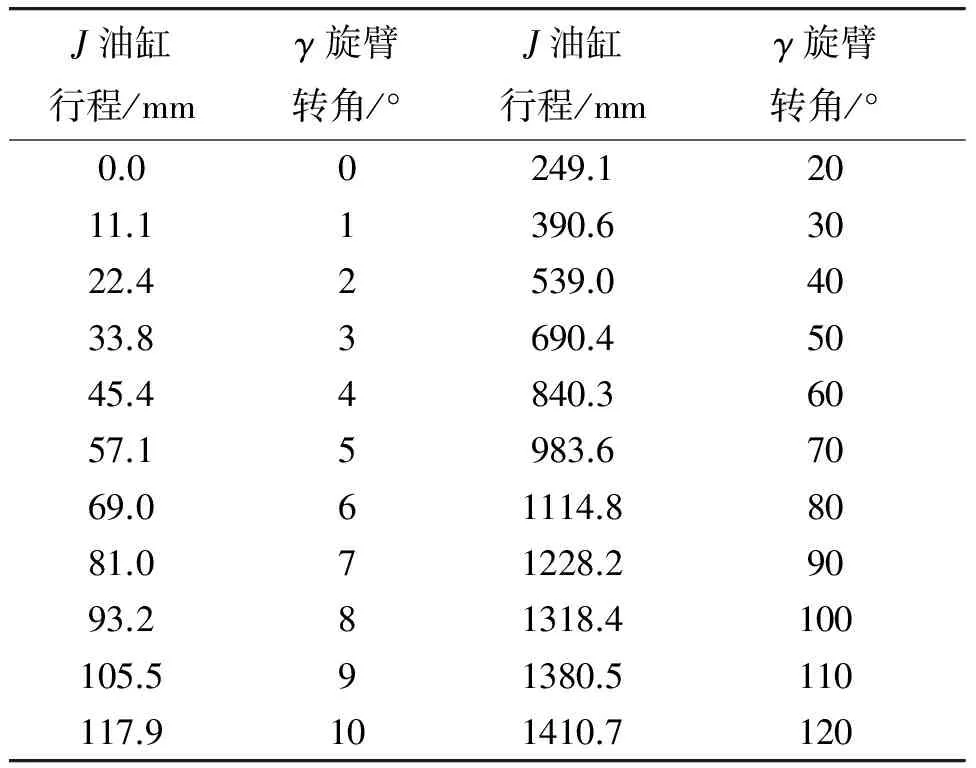
表1 轉臂轉角與油缸行程關系
從表1和圖5可看出:
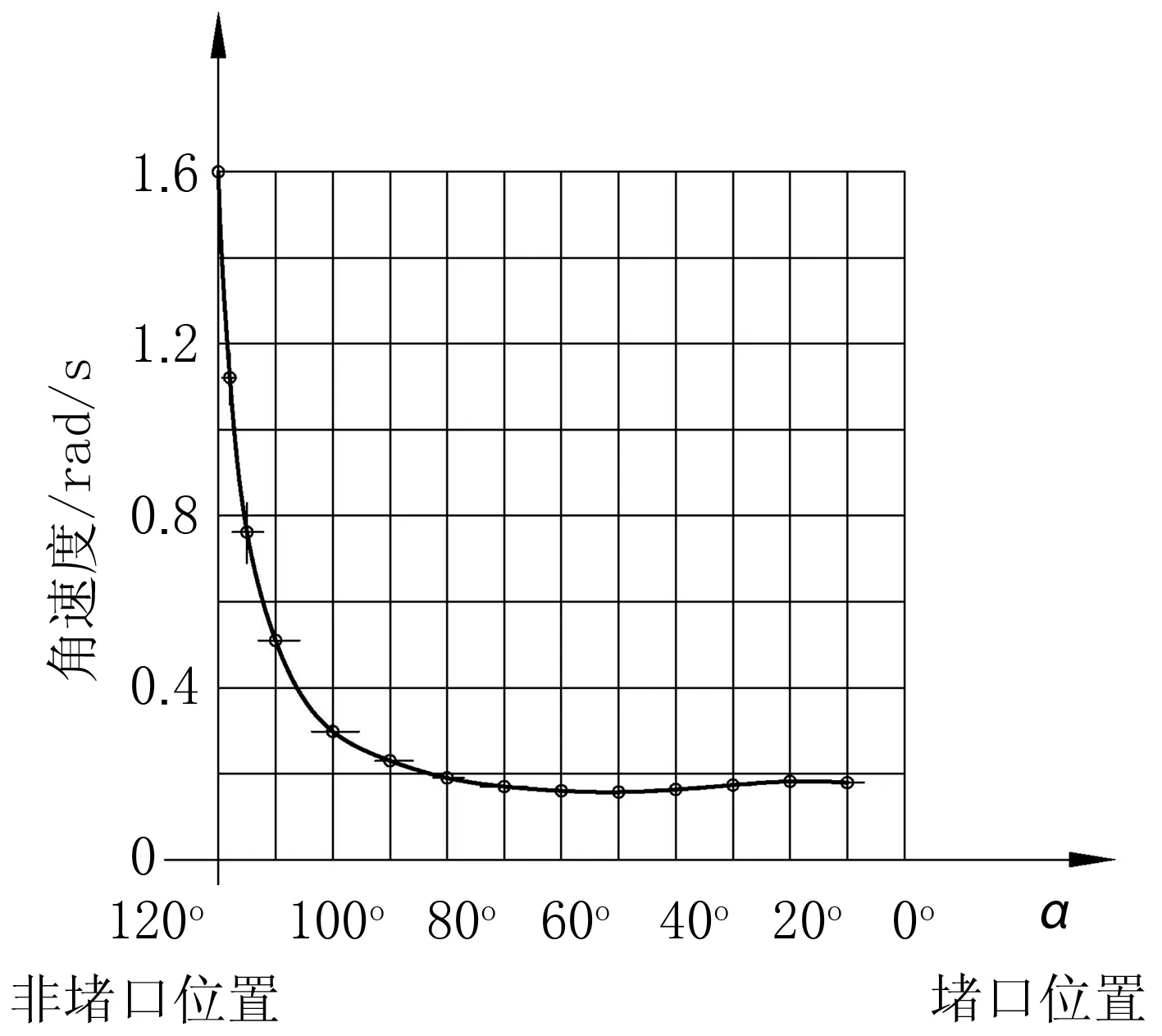
圖5 轉臂旋轉時的角速度關系圖
轉臂從非堵口位置向堵口位置旋轉角度選取,可以看出設備啟動時角速度很大,α轉過的范圍靠近堵口位置時,角速度大約降到最大值的一半,這有利于轉臂較平穩的定位。同時逆向旋轉退炮到待機位時的角速度較大,油缸在結構上要考慮緩沖措施。
6 炮嘴軌跡的確定[3]
其中a=2AJ×HJsinαb=2AJ×HJcosα-2HJ×AGc=GH2-(AJ2+HJ2+AG2)+2AJ×AGcosα
對矢量三角形AJK列矢量方程
由此可得炮嘴K點坐標表達式為:
(5)
式中ψ=θ1+∠HJL,∠HJL由結構尺寸決定,為常量,α在0°~250°間變化。
給定參數后由(5)式利用計算機可以繪制出炮嘴運動軌跡。本方案選定參數如下:
AJ=3860mm;AG=780mm;GH=3518.7mm;HJ=1234.4mm;JK=1925mm;∠HJL=30°;α=56.9°。
得到炮嘴軌跡,如圖6。
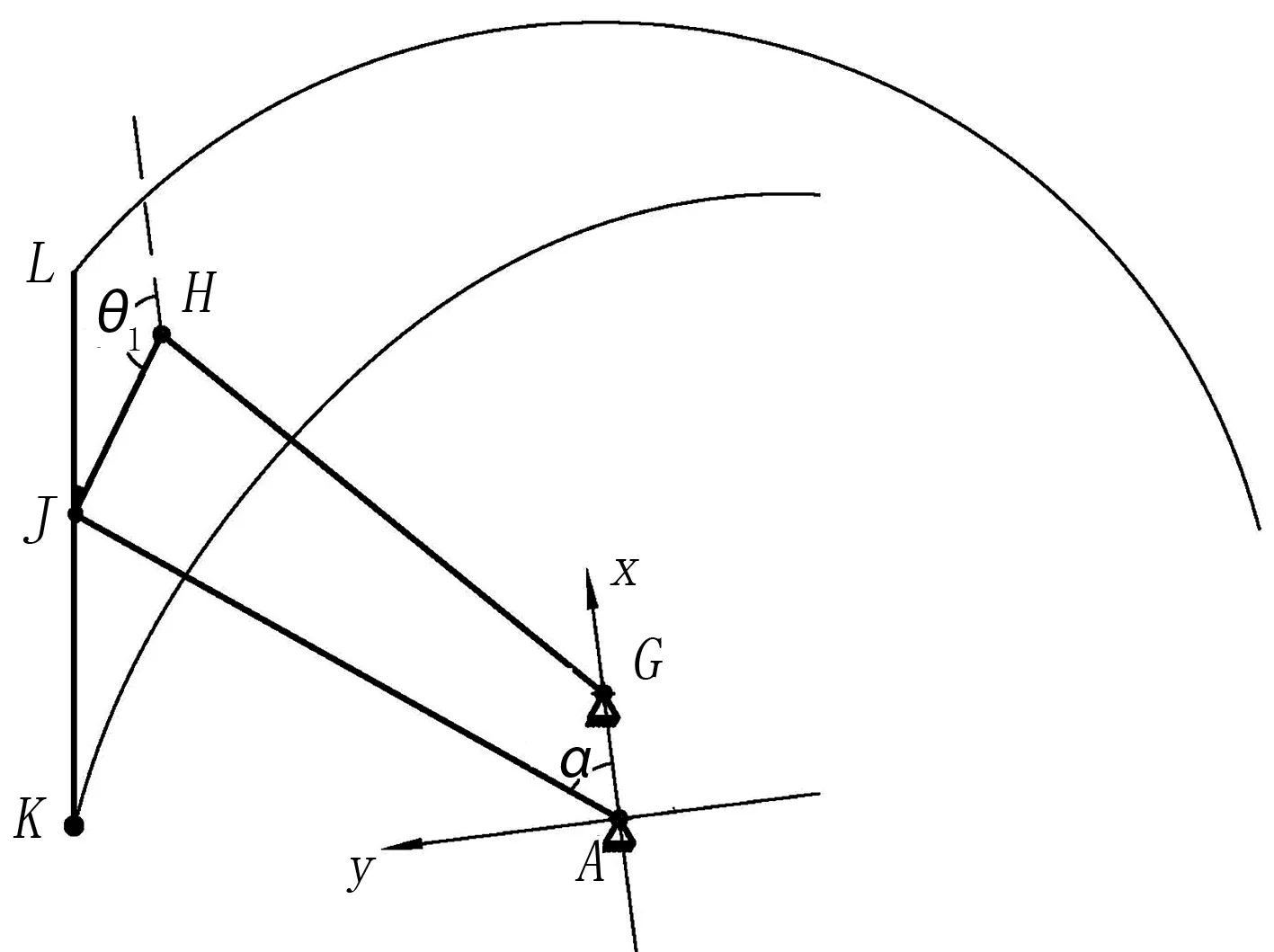
圖6 炮嘴K點相對于A點的軌跡圖
7 部件設計
該型泥炮打泥機構、調整桿工作原理和工藝要求與國內生產的KD、PW、YPF、YPE、DDS型泥炮采用的相同,國產化設計時這兩部分可直接采用。
斜底座設計:斜底座的主要作用是把泥炮炮嘴平面運行軌跡轉變為相對于出鐵口基準點的空間軌跡。其設計的關鍵是確定斜底座上連接面,根據高爐出鐵場布置情況該平面與鐵口基準點及基礎面具有確定的傾斜角度和高度。
液壓系統:液壓系統實現對回轉油缸和打泥油缸的控制。具有以下功能和特點:
回轉油缸回路中應有一定背壓,防止液壓泥炮在回路過程中下坡時發生“俯沖”或動作過快。
回轉油缸在液壓泥炮前進過程中,由于要求速度快,所需流量較大,為了節省主泵能力,該回路采用差動回路,同時泵源還要有一臺備用泵;在悶炮過程中,回轉油缸的液壓回路要有保壓功能,必要時進行補壓;對泵、閥都采用了更適合冶金行業液壓系統的力士樂系列產品。
潤滑方式:采用干油自潤滑形式系統壓力設定為40MPa,可以實現定時定量自動加油和潤滑點監測,并設有油包自動補油功能。
8 結束語
根據泥炮設計的原則及注意事項結合泥炮(回轉油缸直接驅動式液壓泥炮)的數學模型,提出了設計方案。該方案合理可行對此類型泥炮的國產化設計制造具有指導意義。
[1]劉建宏等.液壓泥炮的技術進步[J].冶金設備,2012(4).
[2]成大先等.機械設計手冊[M].北京:化學工業出版社,2002.
[3]李朔東等.液壓泥炮旋轉機構的運動特性分析[J].冶金設備,2010(5).
Localization Research and Analysis of a Hydraulic Clay Gun With Direct Push Forward
Zhao Ziqiang Hui Zhan Fu Guangyong Zhao Bo
(Sinosteel Xi′an Machinery Co., Ltd.,Xi′an 710201)
A steel company, the 4747m3blast furnace use a hydraulic clay gun with direct push forward. The slewing mechanism adopts four bar linkage that the rotary cylinder with one end fixed on the frame, the other end direct drive jib rotating. At present the type of hydraulic clay gun can′t be manufactured in domestic,mainly rely on import from abroad, and not imported equipment price is high and long cycle. In order to realize the localization of the equipment,the article combine the clay gun design principles with the mathematical model, list the mechanism design parameters and put forward the design scheme. The scheme is reasonable and feasible, has guiding significance for localization the equipment design and manufacture.
Blast furnace Hydraulic clay gun Four-bar linkage Scheme
趙自強,男,1981年出生,畢業于陜西理工學院機械設計制造及其自動化專業,學士,工程師,主要從事煉鐵高爐爐前設備的設計與研究
TF321.5
A
10.3969/j.issn.1001-1269.2015.03.008
2015-01-19)