虛實結合的X-Y數控實訓平臺設計
2015-06-23 12:20:27丁明亮丁金華王德權李明穎宗井彬
實驗技術與管理 2015年3期
丁明亮,丁金華,王德權,高 騰,李明穎,宗井彬
(1.大連工業大學機械工程與自動化學院,遼寧大連 116034;2.北京中電華強焊接工程技術有限公司,北京 100076)
虛實結合的X-Y數控實訓平臺設計
丁明亮1,丁金華1,王德權1,高 騰1,李明穎1,宗井彬2
(1.大連工業大學機械工程與自動化學院,遼寧大連 116034;2.北京中電華強焊接工程技術有限公司,北京 100076)
虛實結合的X-Y數控實訓平臺由接口電路板和運行在計算機上的虛擬設備構成。采用網絡連接,基于UDP協議進行上下位機的通信。接口電路板以STM32F103C8RBT6為控制核心作為下位機,完成脈沖檢測、繼電器輸出、網絡通信等功能;虛擬機基于C#開發,完成高速數據交換,界面有動畫效果的電機、絲杠、工作臺、限位傳感器等虛擬組建構成。上下位機虛實結合,實現接口電路板引出端子的電氣特性完全等效真實的X-Y工作臺驅動接口的電氣特性。
虛擬機電裝備;實訓平臺;X-Y數控平臺;ENC28J60
高校工科專業的特點是實踐性強,實驗和實訓在教學中占有舉足輕重的地位,它們是培養學生動手能力、創新能力和解決工程實際問題能力的重要手段[1]。為解決學校實訓設備數量或實訓工位不足、實訓設備落后且不能與企業對接等問題,很多學校已將虛擬仿真技術應用于實踐教學中。然而,單純的虛擬仿真并不能完全達到真實設備的技能訓練效果[2]。
使用機電一體化技術的數控機械如數控機床、繪圖機、火焰切割機、電加工機床以及衣料開片機等,都有一個可在X-Y平面內作復合位移的工作臺。這種工作臺通常與整機設計成一個整體,其工作原理有著共同的特點[3]。因此,X-Y數控平臺是學生學習PLC、嵌入式、計算機等控制系統的典型機電一體化設備。虛實結合的X-Y數控實訓平臺留有真實的機電設備驅動接口,而將機械動作過程進行動畫演示。在這個過程中,學生需要實際動手完成控制系統電路的搭建、編寫程序代碼,而控制系統發出的指令通過接口電路、通信系統傳遞給電腦,電腦軟件仿真出機械的動作。這種虛實結合的實驗儀器設計,不僅可節約實驗室建設費用,而且可以達到預期的實驗教學目的[4]。
1 工作原理
X-Y數控平臺采用伺服電機或步進電機驅動,經過齒輪減速和絲桿傳動后,帶動工作面做平面任意方向的運動[5]。控制對象是以步進電機(伺服電機)、滾動絲杠、導軌座、滑動導軌副、工作平臺等組成的十字工作臺[6](見圖1(a)中虛線內的部分)。X-Y數控平臺結構包括控制機構和執行機構兩部分,執行機構包括了機械部分和接口電路。
虛實結合的X-Y數控實訓平臺用虛擬軟件取代執行機構,設計了與真實設備相同的電氣特性接口(圖1(b)虛線內的部分)。由于控制系統無法區分它所控制的機構是真實的X-Y工作臺還是虛擬的X-Y工作臺,因此實驗人員需要進行真實的控制系統的設計、代碼編寫、連接線等實驗操作。虛實結合的X-Y數控實訓平臺的組成見圖2。接口電路板將控制信號通過網絡傳輸給計算機處理,計算機軟件模擬X-Y平臺的動作,并將虛擬限位傳感器信號送達接口電路板,由接口電路板控制繼電器實際模擬限位信號。
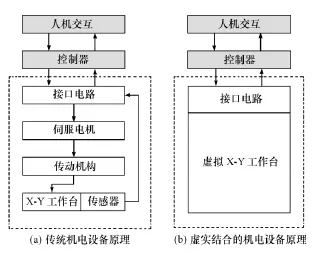
圖1 虛實結合X-Y數控平臺原理圖
接口電路實現4路脈沖輸入、通過撥碼開關切換成2路脈沖加方向的模式,控制2個虛擬的伺服電機精確地移動工作臺。接口電路板有4路繼電器輸出,分別表示X軸方向的2路限位開關和Y軸方向的2路限位開關,還有其他擴展輸入端口。這樣接口電路板的接口與真實X-Y工作臺的接口完全一樣,達到控制機構完全真實而執行機構仿真演示。

圖2 虛實結合X-Y數控平臺
2 硬件設計
接口電路板是完成虛實結合的橋梁,是控制機構與執行機構、現實系統與虛擬系統的接口,用來完成脈沖信號和撥碼開關信息的檢測、與虛擬機通信并處理虛擬機反饋的信息。整塊電路板由STM32C103RBT6最小系統電路、脈沖輸入檢測電路、撥碼開關選擇電路、繼電器驅動電路、網絡通信接口、電源管理電路等6部分構成,另外還有下載以及程序調試電路、控制系統連接的可插拔端子。
2.1 STM32C103RBT6最小系統電路
使用意法半導體公司生產的STM32C103RBT6作為控制核心,實現信息檢測、數據運算、與上位機的通信。該單片機采用ARM 32位的CortexTM-M3 CPU,具有0等待周期的存儲器、單周期乘法和硬件除法、支持定時器和SPI等外設的特點。輸入通道自帶濾波寄存器實現硬件去除脈沖毛刺,減少錯誤脈沖識別,降低了軟件程序編寫的復雜度。其電路如圖3所示。
供電線路寄生阻抗產生的電磁干擾、門電路開關瞬間電流的跳躍式變化、電源線的電感阻止電流的瞬態變化,這3種情況都將影響集成芯片的響應速度[7]。在芯片引腳的電源與地之間加去耦電容(decoupling capacitor)可以防止和減輕這些干擾。
最小系統的復位電路有內部上拉電阻,僅當復位引腳直接接地時系統復位。復位引腳外接下拉電容提高電磁敏感度(EMS),防止寄生復位。STM32一般選用2個容值為10pF的陶瓷電容作為晶振負載電容,負載電容會影響晶振的頻率和振幅,而過大的負載電容會造成晶振起振困難,甚至不能起振。電源的去耦電容選用0.1μF的陶瓷電容,這些電源的去耦電容在電路板布圖時一定要盡可能靠近單片機電源引腳。系統采用串行線調試接口(SWJ),PA13腳用作數據輸入輸出口,PA14用作串行時鐘(SWCLK),SWJ同樣可以進行在線仿真調試。

圖3 STM32F103RBT最小系統原理圖
2.2 脈沖輸入檢測電路
為了防止外部系統的不當操作對系統電路造成不可逆轉的破壞,采用了光電隔離技術。光耦將接口電路板與學生設計的控制機構分開,避免了需要公共地的問題,并且極大地降低了光耦隔離的兩部分噪聲信號的相互影響。光耦的內側設計LED指示燈,當外部有脈沖輸入時,光耦輸入端接通,最小系統的PWM引腳拉低,同時指示燈LED點亮。當外部脈沖輸入低電平時,光耦輸入側斷開,此時PWM引腳會檢測到高電平,同時指示燈LED熄滅。外部輸入的脈沖高低變化時,指示LED閃爍,PWM引腳有邊沿跳變,單片機由此檢測學生設計的控制機構產生的脈沖輸入或者方向信號的電平變化。
脈沖輸入檢測電路如圖4所示。經過測試,光耦輸入電流在5mA時可滿足設計的性能要求。根據EL357N前端電壓與前端電流特性曲線[8],此時輸入端壓降UF約為1.12V,于是假設控制機構信號高電平規定為UINH等于5V,則在原理圖中根據公式(1)式可以計算出限流電阻R22約為776Ω,根據標準電阻表選用820Ω的電阻。

圖4 脈沖輸入檢測電路原理圖

式中:R22為光耦輸入前端限流電阻;UINH為控制機構脈沖信號高電平;UF為光耦前端輸入電壓;IF為光耦前端輸入電流。
當控制機構的高電平UINH大于5V時,需要根據公式(1)選取適當的限流電阻串接在電路中,否則過高的電流會降低光耦的性能,甚至使光耦失效。
2.3 繼電器驅動電路
繼電器輸出開關量模擬限位傳感器傳出的信號。控制機構檢測這些信號并作出合理決策,如停止工作臺的運動等。光耦驅動三極管,三極管驅動繼電器,小電流驅動大電流。繼電器并聯LED作為繼電器當前狀態的指示(見圖5)。
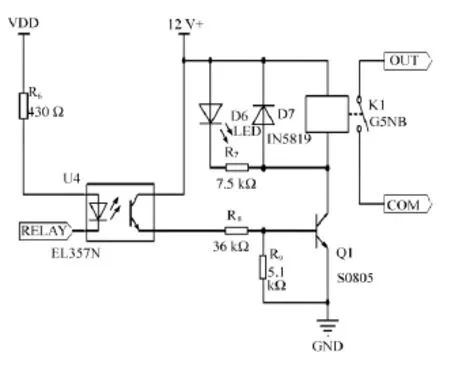
圖5 繼電器輸出電路原理圖
紅色指示燈D6在電流0.77mA可以滿足亮度要求,此時壓降為1.76V。繼電器選用歐姆龍的G5NB-1A12VDC,額定電流16.7mA[9]。為使三極管Q1導通時工作在飽和狀態,基極電流不小于Ic/β,Ic是三極管集電極電流,β是三極管放大倍數。二極管D7在三極管截止時用于構成繼電器線圈的放電回路。
2.4 網絡控制器及接口
基于串口傳輸的RS232、RS485等通信總線雖然硬件電路、軟件編程簡單,但一般傳輸速率在9 600 bit/s,很難達到虛實結合的X-Y數控實訓平臺數據通信的要求。USB總線可以實現高速率的數據傳輸,但是在組網、系統擴展方面有欠缺。
ENC28J60是美國微芯科技公司推出的28引腳獨立以太網控制器,兼容IEEE802.3協議,與微控制器的連接采用10Mbit/s的業界標準SPI接口,既能提供以太網通信的功能,又可以大大簡化設計、減小空間、降低成本[10]。單片機通過SPI接口完成網絡控制芯片的參數配置和進行數據交換。選用帶有網絡變壓器的HR911102A作為網絡接口,通過差分信號實現數據幀快速收發。要實現以太網接口,ENC28J60需要外部連接幾個標準元件(見圖6)。

圖6 ENC28J60電路原理圖
2.5 電源管理電路
由于接口電路板功耗不超過2W,可以從虛擬機主機的USB接口接5V直流電源,通過線性穩壓器件ASM1117-3.3降為3.3V電壓供給最小系統及外圍電路。繼電器由學生設計的控制機構提供12V直流電源。
3 軟件設計
系統軟件包括接口電路板(下位機)的程序設計和虛擬設備軟件開發(上位機)2個部分。
3.1 上位機軟件
上位機軟件采用C sharp(C#)編寫。C#是一種完全面向對象的高級語言,是微軟公司專門為NET Frame-Work開發的編程語言。它簡單易學,摒棄了C++中的指針、宏和多重繼承制,使程序運行更加穩定[11]。仿真界面和通信接口基于C#開發,電機和導軌使用PictureBox控件,背景使用Panel控件,控件關聯變量實現動畫效果。添加的圖像是事先用Photo-shop處理的已經清除背景的PNG格式的圖片。
X-Y平臺仿真界面如圖7所示,它包括電機、絲杠、工作臺等部件。為表現工作臺的運動軌跡,設置了虛擬的刻刀,虛擬刻刀可以在工作臺上繪制滑動的軌跡。仿真界面上添加了虛擬限位傳感器,限位傳感器的位置可以隨意拖放,當工作臺觸碰到限位傳感器時,便使傳感器的綠色色塊變為亮綠色,并向下位機發送信號,由下位機閉合繼電器。網絡通信接口使用了.NET平臺的同步嵌套接字技術,包括同步嵌套字服務器的主機解析、主機綁定、端口監聽、數據接收、數據發送。上位機與下位機的通信采用UDP協議。
3.2 下位機軟件

圖7 上位機仿真界面
傳統的嵌入式微處理器或者是8位的處理器,但其性能有限;或者是32位基于ARM的微處理器但在使用上需要嵌入式操作系統的支持。這一情況直到ARM公司推出Cortex-M內核才得以改善,它無需操作系統,可以像單片機一樣使用Keil C語言進行編程[12]。意法半導體公司為具有Cortex-M內核的STM32系列單片機提供了程序開發的庫,使程序員避開繁瑣的寄存器操作,大大縮短了項目的開發時間。虛實結合的X-Y數控實訓平臺接口電路板的程序,首先實現底層硬件電路的驅動,包括時鐘系統初始化、通用IO口輸入輸出配置、ENC28J60初始化、定時器3捕獲引腳配置等。單片機以中斷的方式捕獲引腳脈沖,因此需要進行中斷優先級的設置。
3.2.1 系統時鐘配置
單片機是在同一的時鐘基準下按照程序編寫流程有序工作的。接口電路板采用外部高速時鐘的方式獲取系統時鐘信號。系統在上電后,首先等待外部8 MHz晶振產生的時鐘穩定,然后由時鐘倍頻寄存器將外部8MHz晶振時鐘倍頻生成72MHz系統時鐘信號。系統時鐘信號再經過1分頻產生高級高性能總線(AHB)的時鐘,在AHB上有2條高級外設總線(APB1、APB2),通過調用庫函數RCC_PCLK1Config()、RCC_PCLK2Config()分頻AHB總線的時鐘,得到APB1與APB2的總線時鐘,這2個時鐘信號分別為掛接在上面的外設提供基準時鐘信號。在使用外設之前,需要開啟相應的總線時鐘。
3.2.2 通用IO口配置
STM32的通用輸入輸出端口(GPIO)可以單獨配置為輸入口或者配置為輸出口。輸入方式有模擬輸入,懸浮輸入、上拉輸入、下拉輸入4種。輸出有開漏輸出與推挽輸出,調用相關的庫函數進行配置寄存器參數的修改。
3.2.3 網絡協議實現
網絡接口的數據傳輸使用了UDP協議,NC28J60網絡控制器提供了網絡通信的物理層。以太網控制器根據MAC地址接收網線上的數據并放在緩存中,單片機以SPI協議讀取緩存中的數據,并根據數據的協議類型,調用相應的處理函數。為了減少單片機閃存的消耗、提高數據的處理速度,系統并沒有直接移植現有TCP/IP協議,而是根據協議規定編寫了ARP協議、ICMP協議、IP/UDP協議。程序調用Void Ether_Init(void)函數初始化網絡接口,在大循環調用unsigned char Ether_Analyze(void)讀取網絡控制器中的數據,在數據發送時調用unsigned char UDP_Send(unsigned char*ip,unsigned int dstport,char*P,int len)函數。
4 結束語
虛實結合的仿真設備大幅降低了實驗室建設和維護的經費,并且打破了地域和時間的限制,提高了實驗室使用效率,調動了學生自主學習的積極性和自覺性,拓展了學生課程學習的空間和時間[13]。作為改進,可以為虛實結合的X-Y數控實訓平臺仿真界面制作三維效果,以更加逼真地顯示工作臺的運動過程和機械原理。如果將評價系統加入仿真機中,可以對學生的操作步驟和程序的運行結果自動打分,實現自動化的遠程教學與實驗。
(References)
[1]蔡衛國.虛擬仿真技術在機械工程實驗教學中的應用[J].實驗技術與管理,2011,28(8):76-78.
[2]黃登紅.機電一體化專業虛實結合實訓模式應用研究[J].中國科技信息,2013(12):161.
[3]成亞萍,曾向陽.數控X-Y工作臺的硬件設計[J].湘潭大學自然科學學報,1998(2):108-110.
[4]熊先鋒,楊國志,呂幫俊.虛實結合的PLC實驗教學儀器設計[J].中國現代教育裝備,2014(5):18-23.
[5]連香姣.X-Y工作臺的機電一體化系統設計[J].北京建筑工程學院學報,2002,18(1):75-76.
[6]王文杰,宋揚.X-Y工作臺的半閉環控制系統設計[J].機械工程與自動化,2007(6):159-161.
[7]徐亮,阮江軍,甘艷,等.去耦電容在PCB板設計中的應用[J].電測與儀表,2002,39(4):5-8.
[8]億光電子工業股份有限公司.4PIN SOP Phototransistor Photocoupler EL357N-G Series[EB/OL].[2014-08-13].http://www.everlight.com/file/ProductFile/EL357N-G.pdf.
[9]歐姆龍自動化(中國)有限公司.G5NB功率繼電器[EB/OL].[2014-08-15].http://www.fa.omron.com.cn/data_pdf/cat/g5nb_ds_c_1_1.pdf?Id=2818.
[10]張偉業,黃云龍,陳國定.基于ENC28J60以太網通信接口的設計與實現[J].機電工程,2008,25(1):28-30.
[11]吳正順,陳孝威.C sharp繪制三維圖形的方法研究[J].貴州大學學報:自然科學版,2009,26(3):53-56.
[12]孫書鷹,陳志佳,寇超.新一代嵌入式微處理器STM32F103開發與應用[J].微計算機應用,2010,31(12):59-63.
[13]馬遠新,姜莉.虛實結合的醫學電工電子實驗室建設[J].中國現代教育設備,2010(21):125-126.
Design of X-Y CNC training platform combined with virtuality and reality
Ding Mingliang1,Ding Jinhua1,Wang Dequan1,Gao Teng1,Li Mingying1,Zong Jingbin2
(1.Department of Mechanical Engineering and Automation,Dalian Polytechnic University,Dalian 116034,China;2.Wise Welding Technology &Engineering Co.,Ltd.,Beijing 100076,China)
The X-Y CNC training platform consists of interface board and virtual machine running on the computer.The master computer with PC and the slave computer with embedded system connected by Ethernet,based on UDP protocol communication.Tacking STM32F103C8RBT6as the core,the interface board carries out pulse detection,the output of relay,network communications and so on.Based on C#,the virtual machine is combined with animation motor,animation screw,animation stages,and so on.The platform combined with virtuality and reality achieves to the function of real machine as students used in real life.The terminal block of interface board is equivalent effect as the interface of real machine.The virtual machine achieves to simulate the acting of the real machine and produce the signal of limit sensor.The platform with Ethernet can be extended to achieve automatic scoring upload,remote monitoring operations,and other functions.
virtuality mechanical and electrical equipment;training platform;X-Y CNC platform;ENC28J60
TP391
A
1002-4956(2015)3-0152-05
2014-08-23
2012年度遼寧省普通高等教育本科教學改革研究立項項目(No.811:多元構建實踐環境培養機電學生就業創業能力)資助
丁明亮(1988—),男,山東日照,碩士研究生,研究方向機械電子工程
E-mail:gnail.2008@163.com
丁金華(1962—),男,山東威海,博士,教授,研究方向為機械電子工程.
E-mail:342012450@qq.com
猜你喜歡
裝備制造技術(2020年12期)2020-05-22 09:25:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
福建教育學院學報(2019年4期)2019-06-12 08:39:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
計算機測量與控制(2017年6期)2017-07-01 16:23:53
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年19期)2017-02-02 07:08:27
新時代職業教育(2016年4期)2016-02-06 02:15:35
