基于剛柔耦合仿真模型的高地隙噴霧機轉向機構特性
2015-06-13 07:29:54楊方飛郝云霄劉克格
吉林大學學報(工學版) 2015年3期
楊方飛,閆 光,郝云霄,劉克格
(1.北京飛機強度研究所,北京100083;2.北京信息科技大學 儀器科學與光電工程學院,北京,100192)
0 引 言
高地隙自走式噴霧機是為解決我國高稈作物生長中后期施藥作業難而制造的新型農業裝備,轉向系統是其核心部件,對于噴霧機的作業性能和整機可靠性具有重要影響。目前國內對于汽車、工程機械領域的轉向系統研究較為成熟,在轉向助力裝置[1]、轉向傳動機構[2]、轉向特性分析[3]、運動特性分析與仿真[4]等方面已有較多研究成果,但在農業機械領域,關于轉向系統的研究并不多,且主要集中于拖拉機的轉向液壓系統[5]、自動控制系統的研究[6]。國外自走式噴霧機經歷了幾十年的發展,在動力轉向系統方面已進行了深入的研究,并在眾多的機型上得到了應用;國內對于該領域的研究則剛剛起步[7],竇玲靜對3WZG-3000A 型全液壓驅動高地隙自走式噴霧機轉向系統的運動學轉向特性進行了分析,并結合仿真結果對轉向油缸固定支架加以改進優化[8],但對于轉向特性的動力學分析沒有涉及。
近年來,隨著高性能計算機的不斷出現以及各種有效數值算法的提出,多剛體機構的動力學建模方法有了長足的發展[9-10],相關的建模理論、計算方法及軟件工程等已經相當完善[11-15],但在多柔體系統建模方面,相關的研究工作尚在開展之中[16-17]。由于工程實際問題大多屬于柔性多體動力學問題,以往為了便于求解,往往將問題簡化為多剛體動力學問題或者結構動力學問題。而對于實際多體系統,構件小位移柔性變形運動與大位移的剛性運動之間的耦合問題十分突出,使得準確分析剛柔耦合多體系統的動力學性態和對機器實施精確控制變得很困難。
本文針對高地隙自走式噴霧機轉向系統的部件進行柔性化處理,考察轉向系統在剛柔耦合作用下的運動學、動力學特性,為準確分析噴霧機轉向系統的轉向特性奠定基礎。
1 剛柔耦合多體動力學建模的基本理論
由于工程中實際存在的大量機械運動可以歸結或簡化為平面問題,因此針對多柔體的平面運動建立方程。
1.1 柔性體參考坐標系的建立
柔性體系統的平面坐標系如圖1 所示,包括整體慣性坐標系OXY,平移坐標系O'iX'iY'i和物體坐標系O'iX″iY″i,O'iX″iY″i固結于O'i,并隨之旋轉。分析柔性體的運動,尤其是在小變形的情況下,可將運動過程近似分解為剛性平移、剛性轉動、變形運動的合運動。
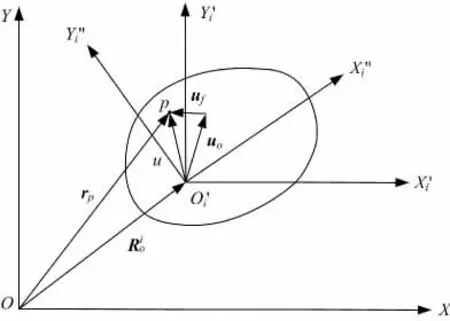
圖1 柔性體上點的描述Fig.1 Description of point in the flexible body
從圖1 可知,柔性體上點p 的位移可表示為:

式中:rp為p 點在整體坐標系下的位置向量;為平移坐標系原點的位置向量;A 為物體坐標系到平移坐標系的旋轉變換矩陣;uo為整體剛性位移向量;uf為局部彈性變形位移向量。
1.2 運動學方程的建立
當整體剛性運動和彈性運動存在相互耦合作用時,由于無法獲得柔性體局部彈性變形uf的精確解,因此一般采用將彈性體離散成有限個自由度或用有限個廣義坐標來表示:

式中:T1為向量從單元坐標系到物體坐標系的變換矩陣;S 為與空間相關的基函數;T2為節點位移向量從物體坐標系到單元坐標系的變換矩陣;qf為在物體坐標系下的j 單元節點位移向量。
將式(2)代入式(1),并令N=T1ST2,由代入后的式(1)求對時間的導數,即可得p 點的速度為:

同理,求對時間的導數,即可得p 點的加速度。
1.3 動力學方程的建立
將動能T 與勢能Ug的公式代入拉格朗日方程,得到柔性體方程式為[18]:

式中:M 為質量矩陣;K 為剛度矩陣;fg為廣義重力;C 為阻尼矩陣;Ω 為歐拉角;λ 為拉格朗日乘子;Q 為外部廣義力。
1.4 剛柔耦合動力學方程的建立
結合柔性體系統動力學方程與多剛體研究方法,則可獲得剛柔耦合多體系統動力學方程:

式中:qi為第i 個節點的位移向量。
系統的約束方程為:

聯立方程(5)(6),即構成了剛柔耦合系統的動力學方程。
2 轉向系統剛柔耦合模型的建立
2.1 轉向系統幾何模型的建立
本文仍以3WZG-3000A 型高地隙自走式噴霧機為研究對象,圖2 為其轉向系統裝配簡圖,應用三維造型軟件Inventor 對轉向系統各零部件完成幾何建模,并進行虛擬裝配、干涉檢查以及運動仿真,從而獲得符合實際運動規律的前輪轉向機構幾何模型[19-20]。為了簡化分析過程,對于不影響后續分析的輪邊馬達、馬達安裝支架在建模時予以忽略。
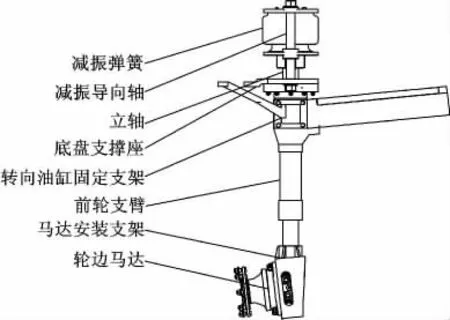
圖2 轉向機構裝配主視圖Fig.2 Main view of steering system assembly
2.2 轉向系統仿真模型的建立
本文研究基于Recurdyn V7R1 仿真平臺。Recurdyn 是由FunctionBay 公司基于相對坐標系運動方程理論和完全遞歸算法開發出的最新多體系統動力學仿真軟件,與傳統多體動力學仿真軟件相比,其對于求解大規模的多體系統動力學問題具有較快的求解速度和穩定性,同時對于機構接觸碰撞問題也有較好的適應性。
將建立的轉向系統模型導入到Recurdyn 中,此時各部件均為剛體,且部件之間相對位置不變,但部件之間的約束已不存在,需要在Recurdyn 中重新定義。對于不存在相互運動關系的部件之間定義固定約束,如減振導向軸與減振彈簧之間定義固定約束;對于存在轉動關系的部件之間(如轉向油缸接頭鉸接處)定義為轉動約束;對于轉向油缸,因其缸桶與缸壁存在平動關系,因此定義為平移約束;對于支腿受地面支撐的反饋作用,將其定義為圓柱約束,即前輪支臂與立軸存在平移和轉動的復合運動,考慮問題的簡化,在本文中僅考慮轉動,以此作為轉向系統的輸入。
定義約束副后的轉向系統模型如圖3 所示,共包括35 個剛體,1 個柔性體(轉向油缸支架),共定義了31 個固定副,2 個旋轉副,1 個圓柱副,1個平移副。

圖3 定義約束副后的轉向系統模型Fig.3 Steering system model with defined constraints
2.3 接觸定義
分析系統構件發生接觸時的特性,重點考慮的是構件之間接觸力的計算。用Recurdyn 計算接觸力是基于Hertz 接觸理論,并在此基礎上做了改進,計算接觸產生的法向接觸力fn的公式為:
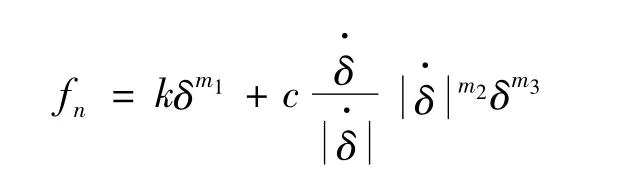
式中:k 為接觸剛度系數;c 為阻尼系數;δ 為接觸穿透深度;為接觸穿透深度的導數(接觸點的相對速度);m1、m2、m3分別為剛度指數、阻尼指數、凹痕指數。
為了考查轉向油缸兩端接頭與剛性底盤支撐座及柔性轉向油缸固定支架之間的接觸力,定義兩對接觸力,分別為剛性面面接觸和剛柔面面接觸。同時,由于轉向油缸支架的柔性特性,需定義其與底座之間的接觸力。
2.4 驅動力
為了簡化問題,模擬轉向系統的運動時,前輪支臂與立軸之間的圓柱約束僅考慮將轉動作為驅動,忽略平動。對圓柱約束施加角位移驅動,驅動表達式設為0.4×sin(time×PI),表示立軸以2 s為一個周期做正弦運動,最大轉動角度為22.92°。
經預分析,轉向系統包含0 個冗余約束,模型驗證成功。
2.5 轉向油缸固定支架的柔性化
Recurdyn 支持兩種類型的柔性體:模態柔性體(RFlex)和有限元柔性體(FFlex)[21]。
RFlex 方法事先用有限元程序計算得出部件的模態參數,然后代替多體系統中的剛體,該柔體在多體中受力后的響應是用模態疊加法計算得到,模態柔性體法的優勢在于可以將復雜的有限元網格模型縮減為一組模態,使計算變得簡單易行,其缺點是由于接觸是用虛擬的“觸點”表述,因此該方法對接觸問題的建模不準確,同時當柔性變形后模態模型的更新仍需要調用外部有限元程序進行計算獲得,因此給分析帶來了不便。
FFlex 方法可以采用內置的有限元程序計算柔體的響應,其將柔性體分割成若干個彼此之間只在節點處相互連接的單元,每一個單元都是一個彈性體,單元位移用節點位移插值函數來表示,由位移插值函數和動力學基本原理來確定每個單元的質量矩陣和其他特性矩陣,采用有限元柔體法還能夠精確地表達接觸力引起的局部變形。但是當柔性體數目較多時,會對求解的速度產生極大影響。因此在本文研究中,對關鍵構件進行柔性化處理,而對其他構件仍按照剛體處理,這樣既可加快求解速度,又可提高求解精度。
對噴霧機轉向系統而言,轉向油缸固定支架因其結構特點,且對于轉向系統具有關鍵性作用,將其進行柔性化處理,而對于其他構件仍作為剛體考慮。轉向油缸固定支架的有限元柔性體如圖4 所示,其中劃分網格16 366 個,節點4672 個。點A 為轉向油缸固定支架與油缸鉸接處。

圖4 轉向油缸固定支架柔性化處理Fig.4 Flexible model of steering hydro-cylinder fixation
3 剛柔耦合運動學、動力學仿真
3.1 運動學仿真
對轉向系統分別進行剛性體運動仿真以及剛柔耦合運動仿真,獲得轉向油缸固定支架分別為剛性體和柔性體時鉸接處A 點的角位移曲線及角速度曲線,分別如圖5 和圖6 所示。
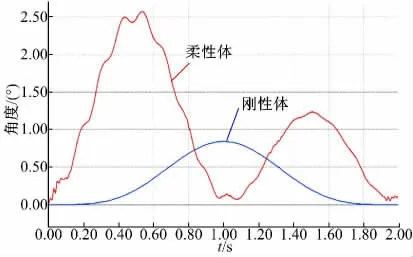
圖5 鉸接處A 點的角位移變化曲線Fig.5 Angular displacement curve of point A
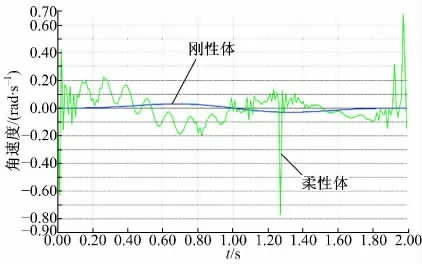
圖6 鉸接處A 點的角速度曲線Fig.6 Angular velocity curve of point A
從角位移變化圖中可以看出,轉向油缸固定支架柔性化后,在一個周期內,鉸接處A 點的位置變化曲線呈兩個波峰,變形最大值發生時間為0.53 s 時,角位移值約為2.52°,此時受預設的驅動力作用,前輪立軸轉動方向發生變化,油缸由壓縮狀態轉變為拉伸狀態。柔性化后,角位移的最大值是剛性體時最大值0.8°的3.2 倍。
從角速度曲線可以看出,轉向油缸固定支架柔性化后,鉸接處A 點的角速度總體呈現2 個正弦波,但各點位置振蕩,在仿真初期的t=1.26 s以及t=1.98 s 時出現大的峰值。經分析,原因是受前輪立軸轉動方向發生了變化的影響。同時也受油缸轉向支架柔性化的影響,柔性化后的角速度幅值為剛性體時的5.1 倍。
3.2 鉸接處A 點的接觸力分析
對噴霧機轉向系統分別進行剛性體動力學仿真及剛柔耦合動力學仿真,獲得轉向油缸固定支架分別為剛性體和柔性化后鉸接處A 點所受的接觸力,如圖7 所示。

圖7 鉸接處A 點的接觸力曲線Fig.7 Contact force curve of point A
從圖中對比可以看出,轉向油缸固定支架柔性化后,鉸接處A 點的接觸力趨勢完全改變,變得振蕩起伏,且出現多個波峰,波峰值最大達到12.2 kN。經分析,出現這一現象的原因除了受轉向油缸固定支架柔性化的影響外,鉸接點處的間隙也對接觸力產生了影響。從圖中得出,固定支架柔性化后,最大接觸力為剛性體時的5.3 倍。
3.3 柔性固定支架動態應力、變形分析結果
將轉向油缸固定支架柔性化后,通過剛柔耦合仿真,可得到柔性固定支架在一個運動周期內的等效應力、應變以及總變形。圖8 為油缸壓縮某一時刻(t=0.46 s)總變形云圖;圖9 為油缸拉伸某一時刻(t=1.44 s)轉向油缸固定支架柔性體的等效應力云圖。從等效應力云圖可以看出,最大應力值發生在節點71 570 處,時間為1.51 s時,最大等效應力值為350 MPa;從總變形云圖能夠看出,最大總變形值發生在節點71 197 處,時間同樣為1.51 s 時,最大總變形量為2.19 mm。由于轉向油缸固定支架采用優質合金鋼鍛造加焊接工藝加工,最大等效應力小于所選材料的許用應力,滿足強度使用要求;最大總變形量對轉彎半徑的大小和轉向的穩定性影響不大。
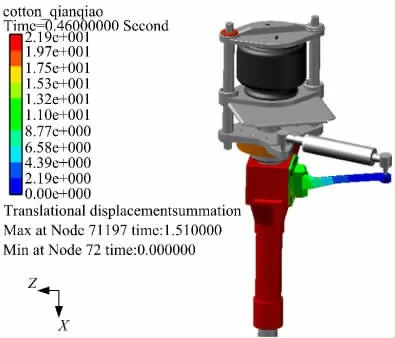
圖8 柔性固定支架總變形云圖Fig.8 Displacement cloud chart of flexible fixation

圖9 柔性固定支架等效應力云圖Fig.9 Equivalent stress cloud chart of flexible fixation
4 結束語
建立了高地隙自走式噴霧機底盤轉向系統的剛柔耦合運動學、動力學分析模型,應用多體動力學軟件Recurdyn 計算了轉向油缸支架柔性化后鉸接處的角速度、角位移等運動特性參數曲線,并與系統構件均為剛體時的鉸接處運動特性參數進行了對比;同時對剛性體和轉向油缸固定支架構件柔性化時鉸接處的接觸力進行了對比,結果為:構件柔性化后的運動特性參數規律發生明顯變化,角位移的最大值是剛性體時的3.2 倍,角速度幅值為剛性體時的5.1 倍,而柔性化后鉸接處A點的接觸力呈現振蕩起伏,且最大值為剛性體時的5.3 倍。此外還獲得了柔性轉向油缸固定支架隨時間的等效應力、總變形變化情況,得到了最大等效應力值及最大總變形值。
通過高地隙噴霧機轉向系統的構件大位移運動與其轉向油缸固定支架小位移柔性變形運動的耦合分析,揭示了趨于真實的轉向系統中因構件柔性化作用對轉向特性產生的影響,為進一步考慮復雜轉向系統的可靠性分析奠定了基礎。
[1]施國標,申榮衛,林逸.電動助力轉向系統的建模與仿真技術[J].吉林大學學報:工學版,2007,37(1):31-36.Shi Guo-biao,Shen Rong-wei,Lin Yi.Modeling and simulation of electric power steering system[J].Journal of Jilin University(Engineering and Technology Edition),2007,37(1):31-36.
[2]黃小平,毛金明.平面梯形機構不能精確實現無側滑轉向的證明[J].農業機械學報,2003,34(6):47-49.Huang Xiao-ping,Mao Jin-ming.Proof on impossibility for any plane trapezoid linkage to reproduce ackermann steering exactly[J].Transactions of the Chinese Society of Agricultural Machinery,2003,34(6):47-49.
[3]劉喜東,劉應東.考慮轉向速度的汽車操縱穩定性分析[J].機械工程學報,2011,47(10):95-100.Liu Xi-dong,Liu Ying-dong.Analysis on vehicle handling and stability considering steering velocity[J].Journal of Mechanical Engineering,2011,47(10):95-100.
[4]王同建,陳晉市,趙鋒,等.全液壓轉向系統機液聯合仿真及試驗[J].吉林大學學報:工學版,2013,43(3):607-612.Wang Tong-jian,Chen Jin-shi,Zhao Feng,et al.Mechanical-hydraulic co-simulation and experiment of full hydraulic steering systems[J].Journal of Jilin University(Engineering and Technology Edition),2013,43(3):607-612.
[5]何卿,高煥文,李洪文,等.基于DSP 的拖拉機電液轉向控制系統[J].農業機械學報,2007,38(10):1-6.He Qing,Gao Huan-wen,Li Hong-wen,et al.Electrohydraulic steering control system of tractor based on DSP[J].Transactions of the Chinese Society of Agricultural Machinery,2007,38(10):1-6.
[6]張智剛,羅錫文,李俊玲.輪式農業機械自動轉向控制系統研究[J].農業工程學報,2005,21(11):77-80.Zhang Zhi-gang,Luo Xi-wen,Li Jun-ling.Automatic steering control system of wheeled model farming machinery[J].Transactions of the Chinese Society of Agricultural Engineering,2005,21(11):77-80.
[7]毛罕平,倪靜,韓綠化,等.高地隙液壓四輪驅動噴霧機轉向防滑控制系統[J].農業機械學報,2012,43(6):58-62.Mao Han-ping,Ni Jing,Han Lu-hua,et al.Turning anti-slip control system of hydraulic four-wheel drive high clearance sprayer[J].Transactions of the Chinese Society of Agricultural Machinery,2012,43(6):58-62.
[8]竇玲靜.高地隙自走式噴霧機輪距可調式轉向系統的設計與研究[D].北京:中國農業機械化科學研究院,2012.Dou Ling-jing.Development and research on wheel track adjustable steering system of high clearance selfpropelled sprayer[D].Beijing:Chinese Academy of Agricultural Mechanization Sciences,2012.
[9]閆楚良,楊方飛.機械數字化設計新技術[M].北京:機械工業出版社,2007.
[10]洪嘉振.計算多體動力學[M].北京:高等教育出版社,1999.
[11]Shabana A A.Flexible multibody dynamics:Review of past and recent developments[J].Multibody System Dynamics,1997,1:189-222.
[12]洪嘉振,蔣麗忠.柔性多體系統剛-柔耦合動力學[J].力學進展,2000,30(1):15-20.Hong Jia-zhen,Jiang Li-zhong.Flexible multibody dynamics with coupled rigid and deformation motions[J].Advances in Mechanics,2000,30(1):15-20.
[13]李杰,閆楚良,楊方飛.聯合收割機振動篩的動態仿真與參數優化[J].吉林大學學報:工學版,2006,36(5):701-704.Li Jie,Yan Chu-liang,Yang Fang-fei.Dynamic simulation and parameter optimization of the combine harvester vibration sieve[J].Journal of Jilin University(Engineering and Technology Edition),2006,36(5):701-704.
[14]楊方飛,閆楚良.基于視景仿真的聯合收獲機虛擬試驗技術[J].農業機械學報,2011,42(1):84-88.Yang Fang-fei,Yan Chu-liang.Virtual test of combine harvester based on visual simulation[J].Transactions of the Chinese Society of Agricultural Machinery,2011,42(1):84-88.
[15]Yang Fang-fei,Yan Guang,Yan Chu-liang.Research on the cutting unit's simulation of combine harvester based on digital modeling and kinematic analysis technologies[C]∥Proceedings of the 8th International Conference on Frontiers of Design and Manufacturing,2008:23-26.
[16]Heidari H R,Korayem M H,Haghpanahi M,et al.A new nonlinear finite element model for the dynamic modeling of flexible link manipulators undergoing large deflections[C]∥2011 IEEE International Conference on Mechatronics(ICM).Istanbul,Turkey,2011:375-380.
[17]董得忠,郭軍,丁希侖,等.雙連桿柔性臂力學建模與仿真分析[J].機械科學與技術,2006,25(4):472-474.Dong De-zhong,Guo Jun,Ding Xi-lun,et al.Dynamic modeling and simulation analysis of a two-link flexible robot manipulator[J].Mechanical Science and Technology,2006,25(4):472-474.
[18]潘祥生,李露,沈惠平,等.基于剛柔耦合建模的工業機器人瞬變動力學分析[J].機械設計,2013,30(6):24-27.Pan Xiang-sheng,Li Lu,Shen Hui-ping,et al.Transient dynamic analysis of industrial robot based on rigidflexible hybrid modeling[J].Journal of Machine Design,2013,30(6):24-27.
[19]Yan Chu-liang,Li Jie,Zhang Shu-ming,et al.Digital design of combine harvester based on virtual prototyping[J].Frontiers of Mechanical Engineering in China,2007,2(2):159-163.
[20]李杰,閆楚良,楊方飛.聯合收割機數字化建模與關鍵部件仿真[J].農業機械學報,2006,37(9):83-86.Li Jie,Yan Chu-liang,Yang Fang-fei.Digital modeling and key parts simulation of combine harvester[J].Transactions of the Chinese Society of Agricultural Machinery,2006,37(9):83-86.
[21]焦曉娟,張湝渭,彭斌彬.Recurdyn 多體系統優化仿真技術[M].北京:清華大學出版社,2010.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2020年1期)2020-09-21 09:24:52
模具制造(2019年3期)2019-06-06 02:10:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00