基于力反饋搖桿的移動機器人遙操作系統的研究
2015-06-12 01:58:10楊海偉
機械制造 2015年3期
□ 崔 巖 □ 楊海偉 □ 崔 澤
1.齊重數控裝備股份有限公司 設備保障部 黑龍江齊齊哈爾 161005
2.上海大學 機電工程與自動化學院 上海 200072
遙操作用于機器人領域已有很長一段歷史,在遙操作中,操縱者借助主、從端設備可以遠距離執行任務,尤其適合于一些危險環境的作業任務,如:海底、太空、核場所等。在遙操作中,一般主要借助遠端傳回的視頻信息進行控制,然而由于視頻反映的信息形式單一,操作者很難獲知系統的精確狀態,此外僅憑視頻信息也不容易掌握諸如機器人遇到周圍有煙霧或光線不好的情形或視頻傳輸故障等突發事件,所以僅依靠視頻反饋的遙操作有很大的局限性,這時遙操作系統就需要通過其它措施來增加操作的可靠性。筆者借助MicroSoft Siderwinder Force Feedback 2搖桿提供力反饋,用以提高虛擬環境中的力覺感受,增加對機器人操作的可靠性、穩定性。移動機器人常用的是速度控制,由于主操作設備運動空間受限,所以位置控制很少使用,但兩者結合或許可以達到比單一控制更好的效果,本文基于力反饋以及視頻和狀態反饋信息,對移動機器人的兩種控制方法進行了分析研究。
1 移動機器人遙操作系統
移動機器人遙操作系統可以分為服務器端、客戶端、無線網絡3部分,系統結構如圖1所示,客戶端包括力反饋搖桿和筆記本電腦,服務器端包括移動機器人本體和內置控制計算機,兩者通過無線網絡通信,對近距離無線傳輸,可以不用無線路由器,只需建立一個Ad-hoc無線網絡即可。
在圖1遙操作系統中,通過操縱力反饋搖桿驅動移動機器人運動,搖桿上輸出量有坐標值x、y和控制方法變量m,其中y和m作為切換控制器的輸入,經切換控制器后輸出y1或y2,x、y1和y2分別乘上各自的比例系數后就成為位置控制和速度控制的控制參數φ、S、V。這些控制參數通過無線網絡傳遞給移動機器人端,再經過逆運算轉換為左、右電機的理想控制參數qd,通過編碼器數據q構成閉環控制,從而驅動機器人以一定的速度和方向朝預計位置運動。操作者通過觀察遠程傳回的反饋信息確定機器人的位置,并將其當前位置和預計位置比較,根據比較結果修正施加在搖桿上的力,使實際位置與理想位置盡量吻合。
1.1 搖桿與移動機器人之間的運動學映射
力反饋搖桿采用MicroSoft Siderwinder Force Feedback 2搖桿,將搖桿的前、后、左、右方向映射成機器人的前進、后退、左轉,右轉,對移動機器人有兩種控制策略:①速度控制方法,即速度值大小與搖桿偏離中心點的坐標值成正比;②位置控制方法,即位移值大小與搖桿偏離中心點的坐標值成正比。為了防止由于操作者的不小心或是一些震動等原因使搖桿發生微小偏離而導致機器人的誤操作,對搖桿進行死區設置,如圖2所示,在中間矩形區域內的動作不會反映到機器人端,兩種控制方法用如下方程描述:

式中:φ、V、S分別是移動機器人的轉角、速度和位置;KV、KS、KA是比例常數;x、y 為搖桿的位置坐標,定義如下:


▲圖2 搖桿死區設置
其中:xdzone、ydzone是正常數。
搖桿的位置坐標表示搖桿在死區范圍內的運動,對移動機器人沒有影響;只有在死區范圍外的運動,才會產生對移動機器人的控制信號。
1.2 移動機器人運動學
分別定義世界坐標系和機載坐標系,機載坐標系下的移動機器人的位置和方向可以用向量P=(x,y,θ)T表示。因為一個移動機器人的運動可以用線性速度V和角速度ω來表示,對差動驅動移動機器人,可以用以下方程表示:

式中:L為檢測獲得的移動機器人與障礙物之間的距離;VR為機器人右輪速度;VL為機器人左輪速度。
在世界坐標系中,速度值P與機載坐標系中速度q有以下關系:


將公式(5)積分,可以得出機器人位置向量P:

式中:[x y θ]T為機器人的實際位置;[x0y0θ0]T為機器人的初始位置。
利用以上方程可以算出在每個控制周期內移動機器人的位置,速度V和ω由安裝在電機上的編碼器測得。
2 控制方法的切換
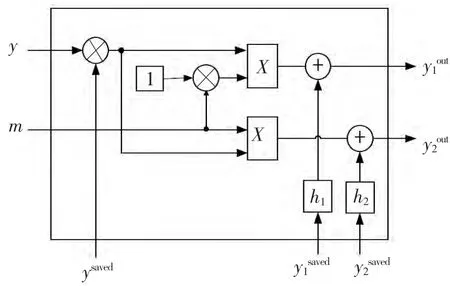
▲圖3 切換控制器內部結構
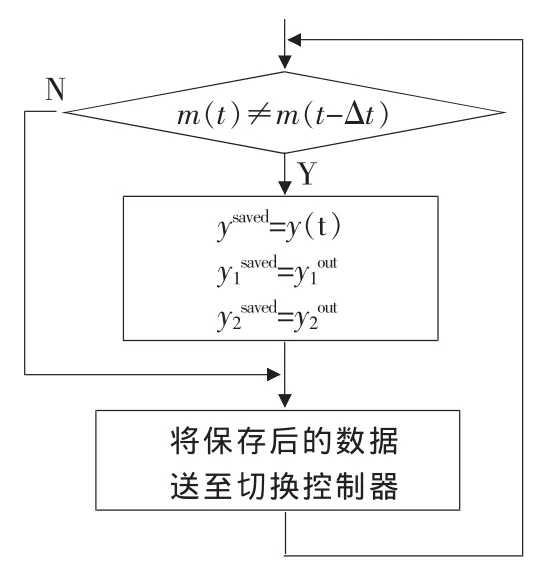
▲圖4 重置算法
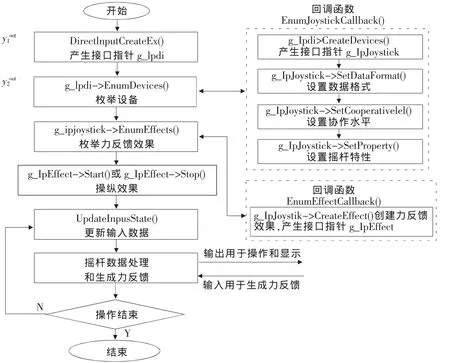
▲圖5 力反饋編程步驟
對移動機器人的控制有位置控制和速度控制兩種方法,在兩種控制方法之間切換必須考慮切換前后移動機器人的狀態變化。切換控制器的內部結構如圖3所示,切換控制器的5個輸入量為搖桿Y向輸出值y、控制方法變量m、每一次控制切換時預保存的搖桿輸出值和切換控制器的輸出值, 后3個變量是通過重置算法實現,具體過程如圖4所示。輸出量是移動機器人的控制參數。圖3中的h1和h2分別是速度控制和位置控制時的離散變量,其值可以取0或1。0表示切換后保持與切換前相同的狀態,1表示將先前的狀態設置為0,比如從速度控制切換到位置控制,切換后將速度先設置為0,即移動機器人先停止。控制方法變量m也是個離散值,同樣可以取0或1。0表示是位置控制方法,1表示是速度控制方法,變量m與搖桿上按鈕1關聯,缺省值為1,即速度控制,第一次按下按鈕1后,m值為0,則切換到位置控制方法,再次按下按鈕1,又切換回速度控制。
3 力反饋功能實現
為了實現力反饋搖桿的位置輸出、力反饋實現以及輸出顯示,采用Visual C++6.0結合Direct X7.0版本的DirectInput組件編程,DirectInput組件包括3個COM 接口[1]:①接口 IDirectInput7 枚舉、創建并取回DirectInput設備的狀態,初始化DirectInput對象并調用Windows控制面板的一個實例;②接口IDirectInputDevice7取得并釋放對DirectInput設備的訪問,管理設備屬性和信息、設置操作、執行初始化、創建和實現力反饋并調用一個設備控制面板;③接口IDirectInputEffect用來管理力反饋設備的作用效果,創建、修飾、打開和停止效果。編程步驟如圖5所示。
要比較準確地反映機器人與周圍障礙物之間的距離信息和得到比較滿意的力反饋效果,力反饋函數的構造是很重要的,一般函數構造準則是:虛擬力大小同移動機器人與障礙物之間距離成反比。兩者越近,反饋力越大。 力反饋函數可以是線性[2][3][5],也可以是非線性[4],其不僅與機器人和障礙物之間距離相關,而且與驅動特性、環境結構相關,本文中僅考慮距離因素的影響,反饋力的大小為:

式中:Ke、Ki是比例常量;L0為安全距離;y為搖桿輸出的Y向值。
從式(8)中可以看出,當移動機器人與障礙物之間的距離L小于L0時,會在力反饋搖桿上產生虛擬反饋力Fe,距離L越小,Fe越大,通過Fe可以很好地實現避障功能。Fi的作用是使搖桿偏離Y軸后向Y軸恢復,反映到移動機器人就是使移動機器人停止。結合式(1)、(2)和(9),可知,Fi是與移動機器人速度和位置成比例的,所以Fi在一定程度上反映了移動機器人的狀態信息,通過Fi可以保證移動機器人在速度控制模式下運動更加平穩。
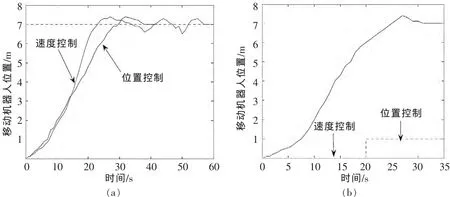
▲圖6 在沒有反饋力情況下移動機器人的控制
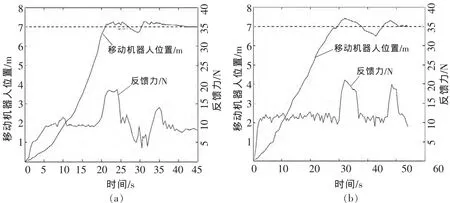
▲圖7 在具有反饋力情況下移動機器人的速度控制和位置控制
4 試驗與結果分析
實驗過程:讓移動機器人從一定點開始運動,在距定點7.5 m處放置一個障礙,移動機器人以盡可能快的速度到達距定點7 m的位置,然后定位在7 m位置處。實驗基于力反饋以及視頻和狀態反饋信息,對移動機器人的兩種控制方法進行了分析研究。具體分兩種情況:①在視頻和狀態反饋信息時,兩種控制方法的實驗情況如圖6所示;② 在視頻、狀態以及力反饋信息時,兩種控制方法的實驗情況如圖7所示。
圖6(a)是在沒有力反饋、只借助視頻和狀態信息反饋的情形下,對移動機器人分別實施速度控制和位置控制。可以看出,位置控制大約需要36 s的時間去完成實驗,即定位在7 m處;而速度控制從定點運動到7 m位置只要22 s的時間,這比位置控制下第一次到達7 m處所需的時間28 s要少,然而完全定位在7 m處則將近要60 s時間。圖6(b)是在一次實驗中分時采用速度控制和位置控制,因為根據圖6(a)知道,速度控制運動速度快,然而定位不夠好,而位置控制定位好,但速度較慢,所以結合兩者,在前面時間內用速度控制,在約6 m處時切換到位置控制,從圖6(b)中可以看出,完成實驗所需時間大約31 s,這說明相對單獨采取一種控制方法,兩者結合可以更快速地完成實驗。
在圖6中只借助于視頻和狀態反饋信息,移動機器人有時會與前方障礙發生碰撞,所以在實驗中增加了力反饋來輔助遙操作。從圖7(a)中可以看出,速度控制時結合力反饋,不但可以避障,整個遙操作過程都很穩定,不會出現大的波動,定位在7 m處所需的時間也比沒有力反饋的情形要少。相對于沒有力反饋情況,力反饋會給移動機器人的位置控制帶來一定副作用,這從圖7(b)中可以看出,雖然力反饋可以在一定程度上幫助移動機器人避障,但有力反饋時,和圖6(a)中沒有力反饋的位置控制相比較,移動機器人會在7 m位置出現較大的波動,同時需要更長的時間才能定位在7 m處。這是因為位置控制的比例系數Ks比較大,導致位置控制會有很高的敏感性。所以力反饋在位置控制模式下不太適合,尤其是在不要避障的情形時。
從以上分析可知,視頻和狀態信息可以反映移動機器人的環境和狀態信息,但不能保證移動機器人不與障礙發生碰撞,而結合力反饋,在更好地感知工作環境的同時,還可以很好地避障。移動機器人的位置控制在定位上效率更高,而速度控制可以快速到達目的地,但定位耗時較長,兩種控制方式結合可以利用各自的優勢。速度控制結合力反饋可以保證操作的穩定性,同時在一定程度上提高定位效率,但位置控制由于其比例系數Ks比較大的緣故,力反饋不適合與位置控制結合。
5 結論
本文在不同反饋信息情況下,對移動機器人的位置控制和速度控制兩種方法進行了比較分析,同時分析了力反饋在遙操作中的作用。實驗結果表明,通過兩種方法的結合,可以在保證速度的同時更好地定位,采用力反饋可以避障、增加臨場感和提高移動機器人遙操作的穩定性。
[1] 武永康.DirectInput原理與 API參考[M].北京:清華大學出版社2001.
[2] Ildar Farkhatdinov,Jee Hwan Ryu.A User Study of a Mobile Robot Teleoperation [C].Hong kong:The 4th International Conference on Ubiquitous Robots and Ambient Intelligence,2007.
[3] A Fattouh,M Sahnoun,G Bourhis.Force Feedback Joystick Control of a Powered Wheelchair:Preliminary Study [C].Hauge,Nttherlands:IEEE International Conference on Systems,Man and Cybernetics,2004.
[4] Sangyoon Lee,Gaurav.Haptic Control of a Mobile Robot:A User Study[C].Lausanne,Switzerland:IEEE/RAJ International Conference on Intelligent Robots and Systems,2002.
[5] Soonshin Han,Jang Myung Lee.Teleoperation of a Mobile Robot Using a Force Reflection Joystick with a Single Hall Sensor [C].Jeju,Korea:16th IEEE International Conference on Robot and Human Interactive Communication,2007.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
制造技術與機床(2017年3期)2017-06-23 08:11:21
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
祝您健康(1987年3期)1987-12-30 09:52:32
