用于履帶驅動的壓電振子接觸摩擦行為*
2015-06-10 00:34:46舒承有章洪軒金家楣
振動、測試與診斷 2015年1期
黃 翀, 王 亮, 舒承有, 章洪軒, 金家楣
(南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)
?
用于履帶驅動的壓電振子接觸摩擦行為*
黃 翀, 王 亮, 舒承有, 章洪軒, 金家楣
(南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)
為了提高傳統壓電振子驅動履帶運動的工作效率以及運行速度,對壓電振子的工作模式進行了改進。利用壓電振子圓環部分繞節圓的扭轉振動替代彎曲振動,將兩個扭轉振動駐波合成扭轉振動的行波,獲得了更適合壓電振子驅動履帶運動的工作模態,以提高壓電振子的驅動效率。新的工作模式不僅增加了壓電振子與履帶的接觸區域數,同時也減小了圓環部分的行波波谷與履帶接觸造成的能量損耗。通過有限元分析對壓電振子進行了設計,制作了原理樣機并進行了接觸、摩擦行為實驗分析。研究了不同預壓力作用下,壓電振子在不同硬度、粗糙度的履帶材料表面上的運動特性,發現:材料的硬度越大,壓電振子的負載能力越強;存在一個硬度、粗糙度、預壓力之間的最佳搭配,使得壓電振子運動速度達到最大。實驗結果為后續的履帶設計以及驅動系統的整體優化奠定了基礎。
履帶; 行星探測; 壓電振子; 摩擦行為; 實驗研究
引言
星際探測是人類進一步開發生存資源和拓展生存空間的基礎工作,對構建持續健康的人類生存環境意義重大。月球和火星作為主要的星際探測對象,俄羅斯、美國、日本和歐盟等國家或組織投入了大量的人力和物力進行研究,已取得豐碩成果[1-3]。中國也規劃了探月計劃和火星探測計劃,“玉兔”號月球探測車已經成功著陸[4]。作為科學探測儀器的載體,巡視探測車的性能(越障能力、承載能力、機動能力和環境適應能力等)成為探測任務高效、可靠完成的質量保障。目前,行星探測車主要包括輪式結構、腿式結構和履帶式結構三類[5]。輪式結構可實現高速移動,機動性能和效率相對較高,且有地面輪式機構的經驗可借鑒,因此在月面行駛系統中被普遍采用[6]。如何進一步提高越障能力和機動性能以適應月面多變的形貌是目前輪式結構需要突破的關鍵技術問題。腿式結構越障能力強,但運動速度慢,其復雜的機構對于可靠性控制是一個巨大的挑戰。履帶結構的越障能力強、承載能力好,但重量和能耗大,由于輪系機構容易受到月面粉塵的污染而限制了履帶式結構的進一步發展[7-9]。
本課題組針對月面復雜多變的地貌,結合履帶式結構具有地形適應能力強、動載荷小及結構緊湊的特點,并基于超聲電機的工作原理[10-12],提出了壓電驅動的履帶式月面巡視驅動系統[13-14]。將壓電陶瓷元件固定在連接4個圓環結構的平行四邊形框架上構成壓電振子,通過激勵水平梁和斜梁結構的縱向振動模態,在圓環結構上耦合形成旋轉的彎曲行波,經摩擦作用驅動圓環外表面的履帶運動。該方案具有結構簡單緊湊、無鏈輪、惰輪和負重輪等機構及無需潤滑的運動副等優點,同時利用壓電振子在超聲頻率的工作模式起到了自清潔的效果,解決了月塵進入驅動系統內部導致機構失效的問題。由于上述方案依靠圓環部分的彎曲行波驅動履帶運動,不僅工作效率較低、運行速度慢,還存在履帶與圓環部分的接觸區域數少以及由于行波波谷與履帶接觸產生的阻礙作用等問題[15-16]。
為了解決上述壓電振子存在的問題,本課題組對四環形壓電振子的工作模態進行了重新規劃。利用圓環部分繞節圓的扭轉振動替代彎曲振動,將兩個扭轉振動駐波合成扭轉振動的行波,使壓電振子與履帶的接觸區域數成倍增加,減小了圓環部分行波波谷與履帶接觸造成的能量損耗。通過有限元分析對壓電振子進行設計,制作了原理樣機并進行了接觸、摩擦行為實驗分析。
1 結構設計
圖1為四環形壓電振子的結構示意圖。與文獻[13]設計的壓電振子在結構上最大區別是6組壓電陶瓷元件的布置方式發生了改變,由布置在水平梁和斜梁結構的上、下表面改為兩側面,對壓電振子產生的直接影響是改變了工作模態。文獻[13]設計的壓電振子采用水平梁部分的3階縱振和斜梁部分的1階縱振在圓環上耦合形成面內的三階彎曲行波,而改進后的壓電振子采用水平梁部分的13階彎振和斜梁部分的3階彎振耦合激發出圓環部分的具有6個波峰波谷并排呈現且繞節圓扭轉的旋轉行波。壓電陶瓷元件采用黏貼方式布置在水平梁和斜梁部分的彎振振型的最大應變處。此外,為了增大圓環上的振幅,在水平梁和斜梁分別與圓環結構連接處設置了變截面結構。

圖1 四環形壓電振子的結構示意圖Fig.1 The structure of piezoelectric vibrator
改進后的四環形壓電振子在履帶車上的安裝方式與文獻[13]不同。由于改變了壓電陶瓷元件在水平梁和斜梁上的黏貼位置,導致水平/斜梁的工作模態發生改變,所以原來設置在水平梁側面用于連接車體的安裝孔被設置在水平梁的上、下表面,且設置在彎振的節點位置。履帶張緊在四環形壓電振子的圓環外表面。車體通過連接板固定在兩個四環形壓電振子上,連接板通過銷釘與壓電振子水平梁上的安裝孔連接,履帶車的結構如圖2所示。
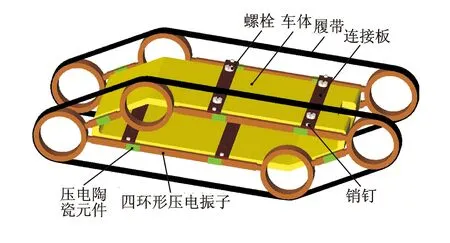
圖2 履帶行駛系統的裝配圖Fig.2 The assembling of tracked travelling system
2 工作原理
2.1 壓電振子的工作模態
根據對壓電振子的改進設計,水平梁部分和斜梁部分的振型由縱振變為彎振,而圓環部分由原來的三階彎曲旋轉行波變為具有6個波峰波谷并排呈現且繞節圓扭轉的旋轉行波。具體的激勵方式如下:a.上、下水平梁結構各設置兩組壓電陶瓷元件在正弦電壓的驅動下激發出水平梁部分的13階彎振,而圓環部分被激發出具有6個波峰波谷并排呈現且繞節圓扭轉的駐波,如圖3(a)所示。由于在上、下水平梁各設置的兩組壓電陶瓷元件的極化方向相反,因此被激發出來的兩個13階彎振在空間相位上具有π的相位差,如圖3(b)所示。b.左、右斜梁結構各設置的一組壓電陶瓷元件在余弦電壓的驅動下激發出斜梁部分的3階彎振,而圓環部分同樣被激發出具有6個波峰波谷并排呈現且繞節圓扭轉的駐波,如圖3(c)所示。同樣,由于左、右斜梁上壓電單元的極化方向相反,因此被激發出的3階彎振振型在空間相位上具有π的相位差,如圖3(d)所示。由水平梁部分與斜梁部分的彎振振型分別激發出圓環部分具有6個波峰波谷并排呈現且繞節圓扭轉的駐波具有π/6的空間相位差,恰好滿足了在圓環部分上形成具有6個波峰波谷并排呈現且繞節圓扭轉振動的旋轉行波的要求。
圓環部分的扭轉行波振型保證了履帶與壓電振子接觸區域全為行波波峰區域,減小了文獻[13]中設計的壓電振子圓環部分的彎曲行波振型存在行波波谷與履帶接觸造成的能量損耗,同時在圓環部分的振幅不變的情況下增加了履帶與壓電振子的接觸區域數,提高了壓電振子驅動履帶的效率。
2.2 圓環表面的振動特性
由于水平梁部分的13階彎振和斜梁部分的3階彎振在圓環上耦合形成繞節圓且具有6個波峰波谷并排呈現的扭轉旋轉行波,因此分析圓環表面的振動特性能進一步了解壓電振子的工作原理。圖4為圓環上質點的振動特性。圖4(a)提取了圓環表面上任意的一條沿軸向的直線ab作為分析的對象。圖4(b)和4(c)描述了直線ab的振動特性。其中:質點a和b分別為直線ab在圓環前、后端面與外曲面相交的點;c為直線ab與節圓的交點。當扭轉行波在圓環上形成后,質點a的振幅從A到-A周期性的變化,而質點b則從-A到A周期性的變化,且在任何一個時刻,質點a和b的振幅絕對值相等、方向相反;而質點c始終處在節圓處靜止不動。當質點a的振幅從A變化到0時,即質點b的振幅從-A變化到0,直線ac和bc上的質點同樣從它們振幅絕對值最大位置變化到0,且直線ac和bc上的質點的最大振幅絕對值沿著ac方向和bc方向逐漸減小至0。
圓環上的任意一條沿軸向的直線的振動特性都如圖4所示。在扭轉行波行進的一個周期內,只有當直線ab上的所有質點都處于平衡位置時才會與履帶接觸,但此時所有質點的切向速度為零,即摩擦力不做功;而當質點a和b的振幅不為零時,直線ab上只有振幅為正值的質點a或b才會與履帶接觸。將上述理論拓展到整個圓環曲面,始終只有圓環處在波峰區域的質點與履帶接觸并且協同驅動履帶運動。這樣的驅動方式保證了所有接觸點切向力方向一致,避免了行波波谷與履帶接觸引起的反向驅動能量損耗,提高了壓電振子驅動履帶運動的效率。
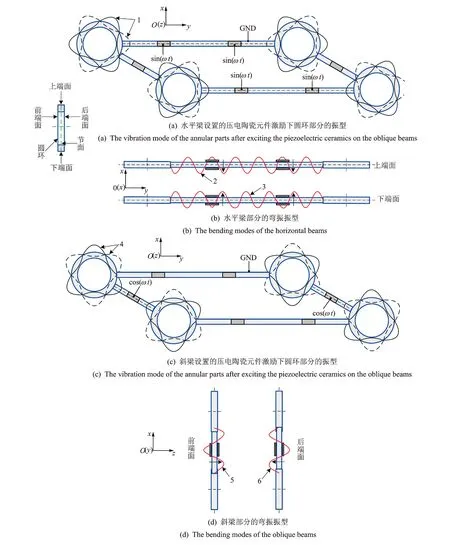
1.水平梁部分彎振激發出的圓環部分的扭轉振型;2.上水平梁部分的13階彎振振型;3.下水平梁部分的13階彎振振型;4.斜梁部分彎振激發出的圓環部分的扭轉振型;5.左斜梁部分的3階彎振振型;6.右斜梁部分的3階彎振振型
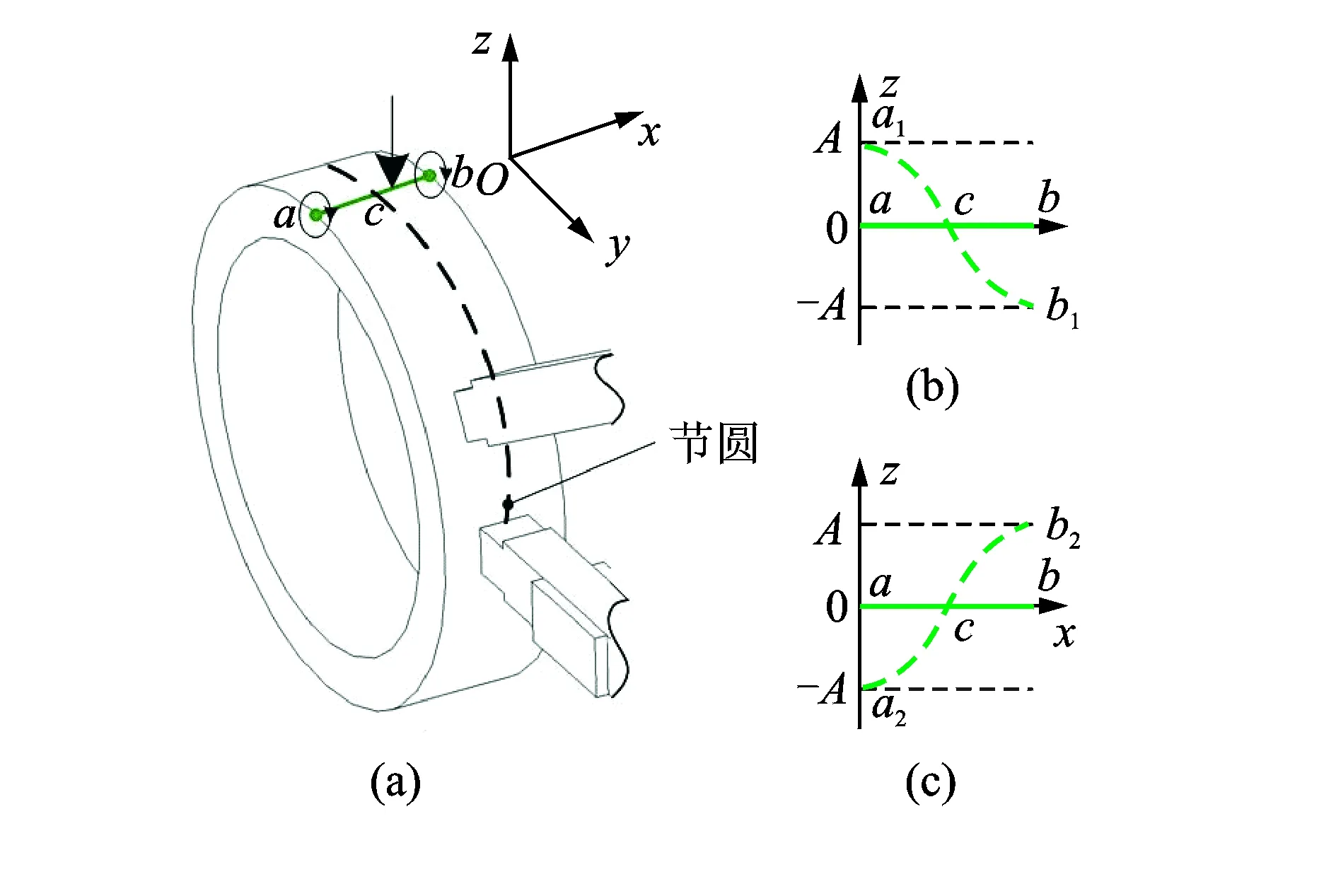
圖4 圓環表面的振動特性Fig.4 The vibration characteristics of the surface of the annular part
2.3 壓電振子的仿真分析
為了驗證對壓電振子工作模態分析的正確性以及結構設計的合理性,課題組利用商業有限元軟件ANSYS對壓電振子進行模態分析。通過對結構參數的調整,選取的模態振型如圖5所示。A相振型頻率為51.701 kHz,此時斜梁部分呈現為3階彎振,圓環部分被激發出具有6個波峰波谷并排呈現且繞節圓扭轉的駐波;B相振型頻率為51.768 kHz,水平梁部分呈現為13階彎振,同樣圓環部分再次被激發出具有6個波峰波谷并排呈現且繞節圓扭轉的駐波。水平梁部分與斜梁部分的彎振振型分別激發出圓環部分上的扭轉駐波振型具有π/6的空間相位差。根據模態分析的結果確定了壓電振子的幾何參數,并通過諧響應分析證明了圓環部分產生了具有6個波峰波谷并排呈現且繞節圓扭轉的旋轉行波。
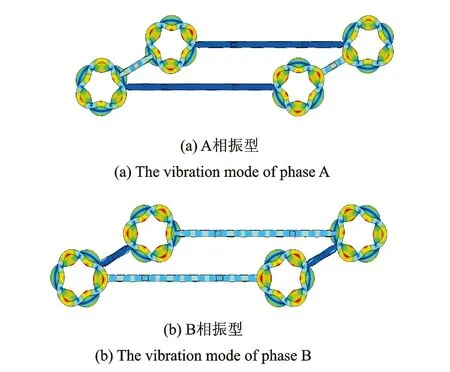
圖5 壓電振子的兩相振型Fig.5 Two-phase vibration modes of the piezoelectric vibrator
2.4 測振實驗
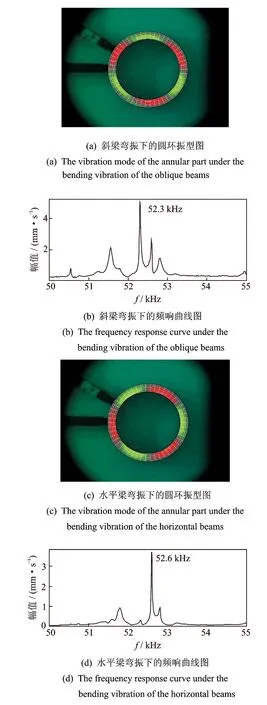
圖6 壓電振子的測振結果Fig.6 The results of vibration test for the piezoelectric vibrator
根據有限元分析結果確定了壓電振子的幾何參數并制作了樣機。為了驗證有限元分析結果,課題組利用二維多普勒激光測振系統對壓電振子進行了測振實驗,得到了斜梁部分和水平梁部分在彎振激勵下圓環部分的兩相振型和頻響曲線,如圖6所示。由于圓環的外表面是曲面,無法通過二維多普勒激光測振系統進行測量,因此利用泊松效應,通過測量圓環端面的振型來推斷其外表面的振型。
當斜梁部分被余弦信號激勵呈3階彎振振型,圓環部分的振型如圖6(a)所示,圓環部分的一個波峰位于斜梁與圓環連接處,其頻率為52.3 kHz,頻響曲線如圖6(b)所示。當水平梁部分被正弦信號激勵呈13階彎振振型,圓環部分的振型如圖6(c)所示,圓環部分的一個波峰位于水平梁與圓環連接處,頻率為52.6 kHz,頻響曲線如圖6(d)所示。測振結果表明,對壓電振子重新規劃后的工作模態是可行的,并且由水平梁部分和斜梁部分激發出圓環部分的兩個扭轉駐波的頻率相差只有300 Hz。
3 壓電振子接觸摩擦行為實驗
壓電振子作為履帶行駛系統的關鍵部件,與履帶之間的接觸特性和摩擦行為研究可指導履帶設計以及整個驅動系統的整體優化。壓電振子通過摩擦作用驅動履帶運動,不僅與壓電振子的運動機理密切相關,同時也涉及履帶的硬度、接觸表面的粗糙度以及與壓電振子的接觸壓力等因素。因此,對壓電振子進行接觸摩擦行為的實驗研究來探索履帶的設計,有利于改善行駛系統的性能和提高壓電振子的驅動效率。
3.1 實驗系統
建立基于不同履帶材料接觸表面的硬度以及粗糙度的實驗測試系統,對探索壓電振子在不同硬度和粗糙度的履帶接觸表面下隨著不同預壓力變化的運動特性至關重要。壓電振子的設計是根據其工作模態確定的,而履帶的設計需要根據壓電振子用于驅動履帶的圓環部分的接觸摩擦行為特性來確定。因此,以壓電振子在硬度和不同粗糙度的履帶材料表面的運動特性為依據建立了測試系統進行接觸摩擦行為實驗,如圖7所示,由2個功率放大器,1個信號發生器和1個示波器組成。履帶接觸表面的硬度由4種不同的材料決定,如圖8所示,包括鋁合金、錫青銅、Q235鋼和65錳。履帶接觸表面的粗糙度是對上述4種材料的表面進行加工處理得到。壓電振子下水平梁部分連接的兩個圓環與履帶材料加工后的表面接觸,上水平梁部分連接的兩個圓環與一根鋼尺接觸。由于用于與圓環接觸的鋼尺表面具有凹槽,壓電振子在工作模態下無法驅動鋼尺運動,因此適合在鋼尺上施加不同質量的砝碼來實現不同預壓力下振子的運動特性實驗。為了準確測量壓電振子的運動速度,采用了攝像機全程記錄壓電振子的運動情況,然后對攝像機所記錄的視頻進行分析,得到壓電振子的平均運動速度。
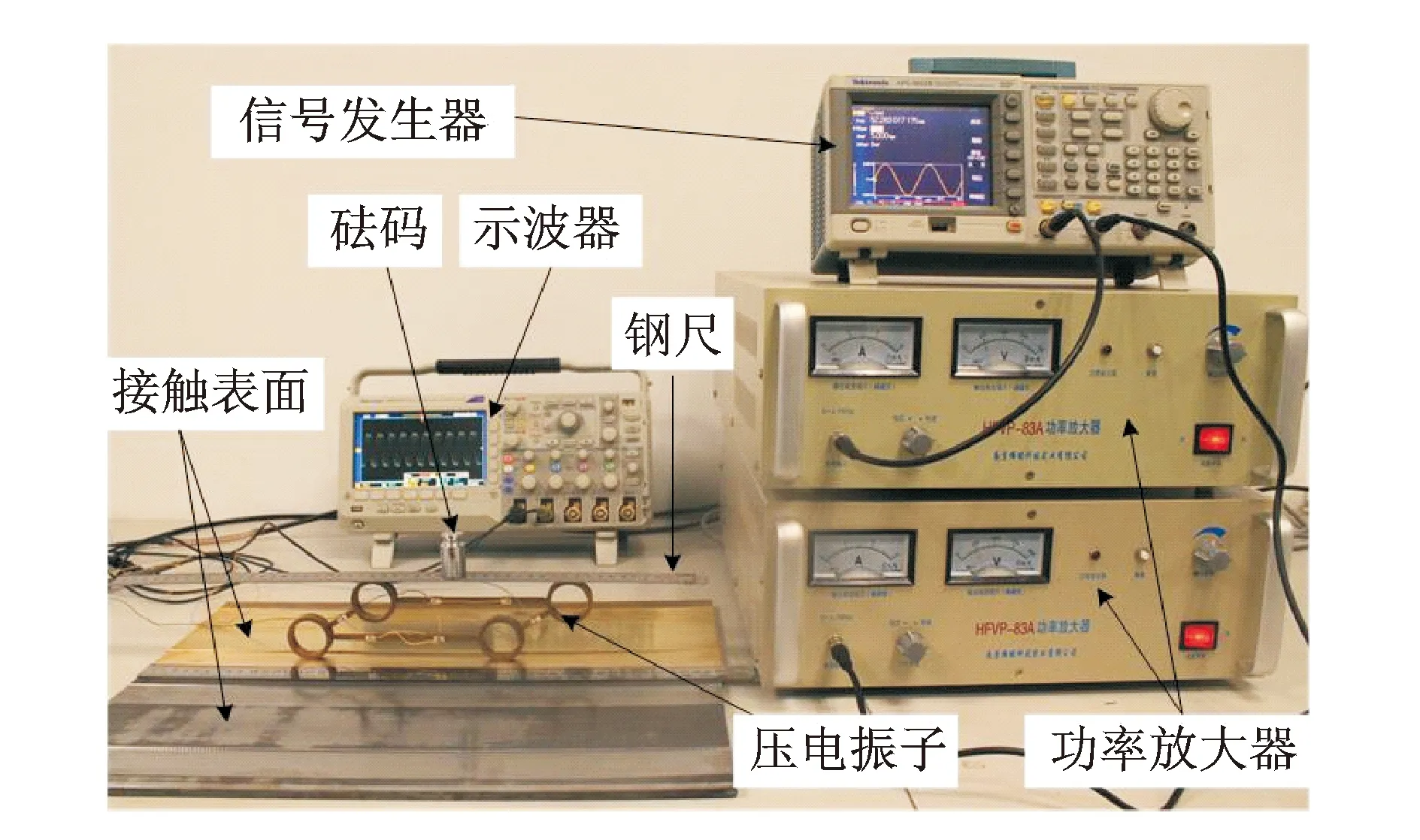
圖7 摩擦行為測試實驗系統Fig.7 Test system of friction behavior
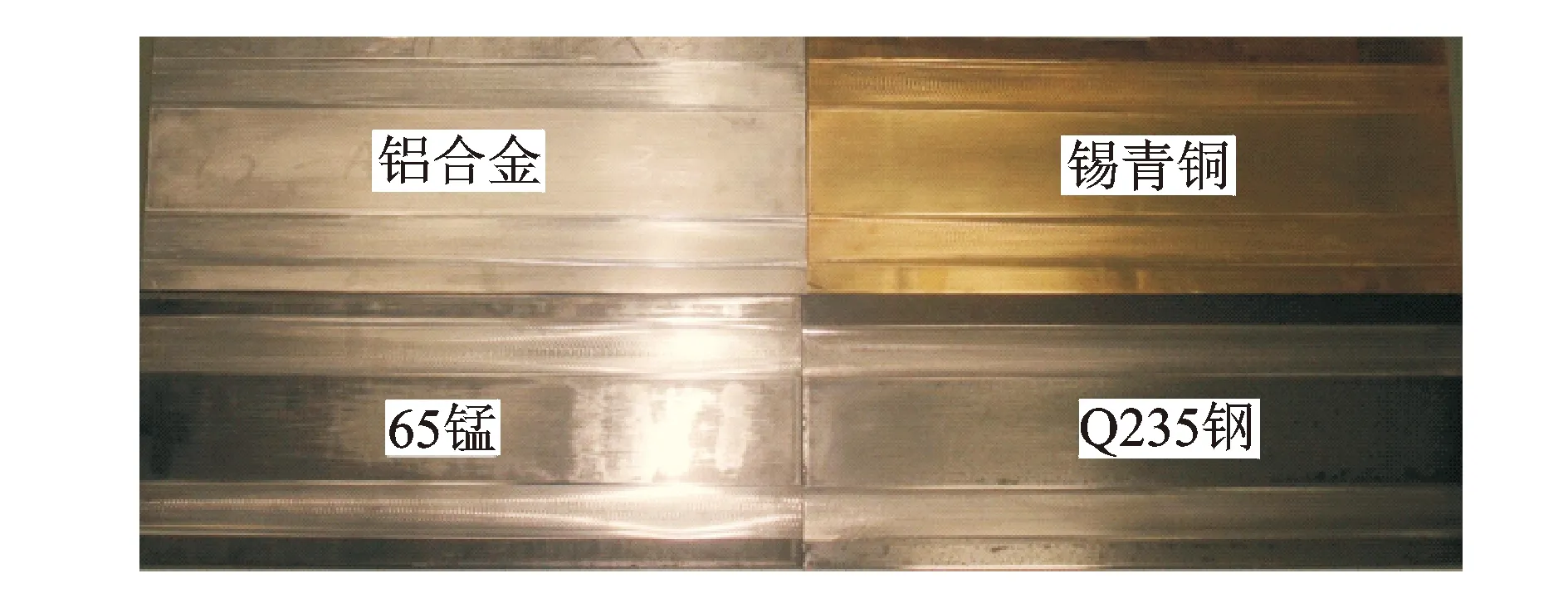
圖8 履帶的材料Fig.8 Materials of the track
3.2 預壓力對運動特性的影響
為了驗證設計的四環形壓電振子的可行性,筆者進行了不同電壓驅動下的運動特性研究。利用圖7所示的測試實驗系統,將鋁合金、錫青銅、Q235鋼和65錳的表面加工成光滑平面(粗糙度約為0.025 μm)。壓電振子在上述粗糙度的4種履帶材料接觸表面的運動特性如圖9所示。其中,壓電振子處于無負載狀態下且與履帶材料表面接觸的預壓力由自身重力提供,施加在振子上的驅動電壓從130 V變化至250 V,變化步長為30 V,定子的工作頻率固定為52.4 kHz。由圖9的實驗結果可知,隨著激勵電壓的增加,壓電振子的運動速度呈線性增加。壓電振子在Q235鋼的接觸表面上運動,隨著電壓增加,速度增加的幅度最大;而在錫青銅和65錳的接觸表面上運動,速度變化較為平緩。當電壓為250 V時,壓電振子在Q235鋼的接觸表面上的運動速度能達到36.7 mm/s。
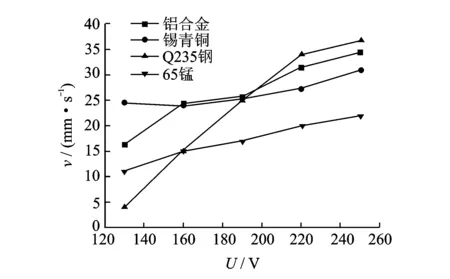
圖9 壓電振子在不同電壓驅動下的運動特性Fig.9 The kinetic characteristics of piezoelectric vibrator under different driving voltages
壓電振子在載荷狀態下進行不同硬度、相同粗糙度(粗糙度約為0.025 μm)的履帶接觸表面的運動特性實驗,對進一步研究壓電振子的摩擦行為具有重要的指導意義。利用鋼尺表面的凹槽與壓電振子的圓環接觸無法被驅動的特性來實現壓電振子負載運動實驗。在保證振子重心不變的情況下,通過在鋼尺上施加不同質量的砝碼,給壓電振子施加預壓力。與空載狀態下相比,鋼尺與壓電振子的兩個圓環的接觸改變了其邊界條件。將負載對壓電振子運動特性的研究轉化為外界對壓電振子施加預壓力的方法來研究振子的運動特性,能夠提供一定的邊界參數來指導履帶的設計。施加在壓電振子上的預壓力從1 N開始增加至振子速度為零的最大預壓力為止,并且實驗過程中施加在壓電振子上的工作電壓峰峰值為200 V,工作頻率為52.4 kHz。實驗結果如圖10所示,壓電振子在4種金屬材料的接觸表面上運動,在不同的預壓力條件下具有不同的運動速度,達到最大預壓力時速度為0。
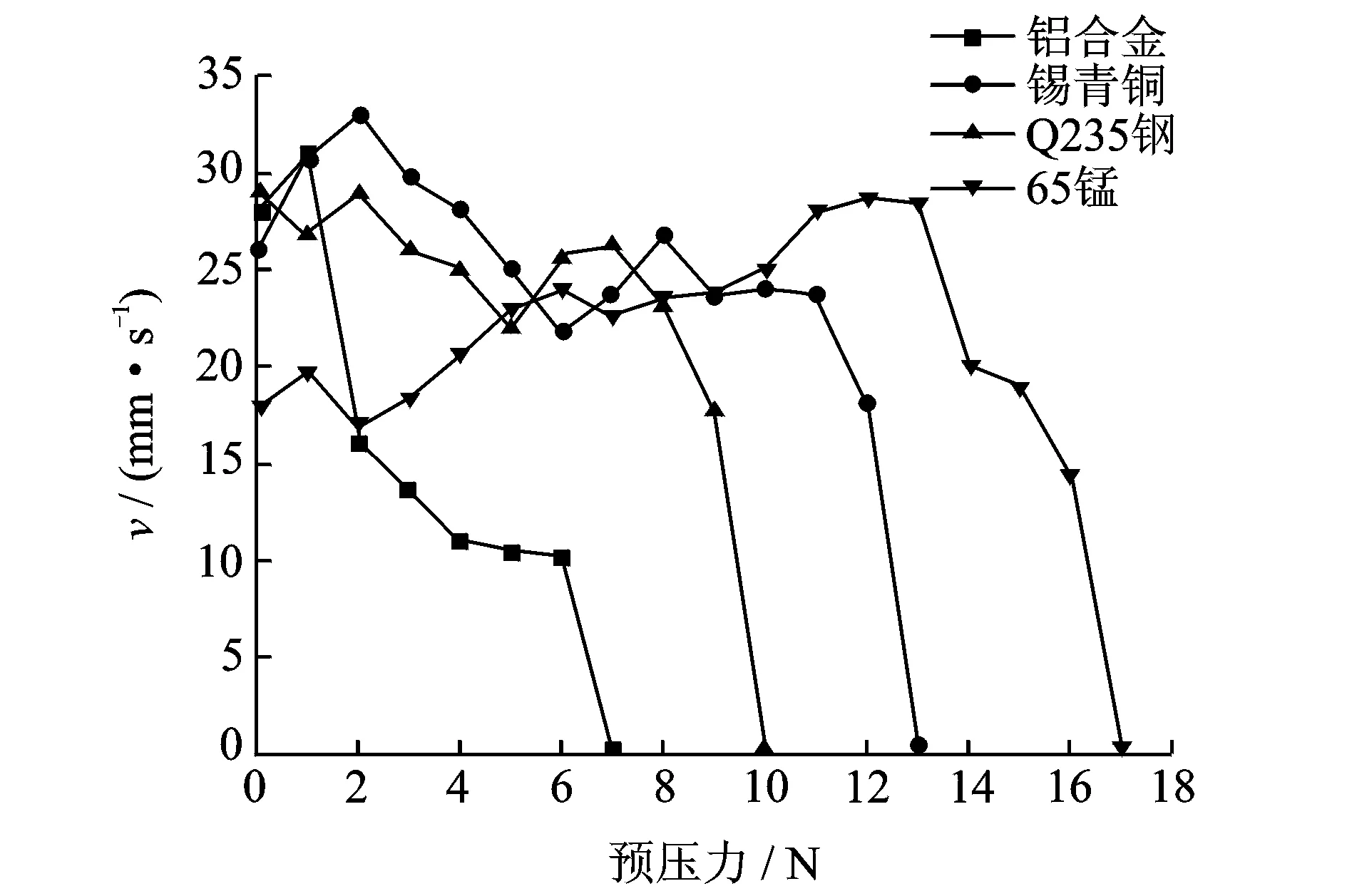
圖10 不同預壓力下的速度變化曲線Fig.10 The variation curves of velocity under different pre-pressures
由實驗結果分析可知,對于任意一種硬度的履帶接觸表面,壓電振子都存在一個最佳預壓力值,即在最佳預壓力下壓電振子的運動速度最大。在判定最佳預壓力時,不考慮壓電振子處于無負載狀態下的速度變化情況。無負載狀態下壓電振子與履帶表面接觸的預壓力由自身重力提供,因此測得的運動特性反映了振子的本體特性。粗糙度相同的、不同硬度的履帶接觸表面,壓電振子的最佳預壓力的范圍不一樣。在錫青銅的接觸表面,最佳預壓力對應的壓電振子的運動速度最大,而在Q235鋼的接觸表面下的速度最小。鋁合金、錫青銅和Q235鋼的3種履帶材料的接觸表面對應的最佳預壓力都在2N左右,而65錳的接觸表面對應的最佳預壓力在12N左右。可以看出,履帶接觸表面的硬度對壓電振子的運動性能影響非常大。當預壓力超過最佳預壓力的值后,壓電振子的速度呈遞減的趨勢下降,對于任何一種硬度的材料,都具有相同的遞減趨勢。當預壓力達到一定值后,壓電振子的速度接近0。最大預壓力反映了壓電振子驅動履帶車的負載能力,壓電振子的速度接近0時預壓力越大,履帶車的負載能力越強。履帶材料的接觸表面硬度越大,壓電振子的最大負載能力越強。由于鋁合金的硬度最小,因此壓電振子的負載能力最差;而65錳硬度最大,壓電振子的負載能力是鋁合金接觸表面上的2.5倍。在Q235鋼的接觸表面,壓電振子的負載能力沒有反映出隨著硬度增加負載能力增強的特性,主要原因是Q235鋼接觸表面的粗糙度在加工過程中沒有得到保證,過于光滑導致壓電振子的負載能力降低。對于粗糙度小的接觸表面來說,高硬度的履帶材料能有效提高壓電振子的驅動性能。
3.3 粗糙度對運動特性的影響
壓電振子在不同硬度履帶接觸表面的運動特性實驗證明,履帶材料的硬度對壓電振子的運動特性有較大影響。為了進一步探討履帶材料接觸表面的粗糙度對壓電振子運動特性的影響,通過對圖8所示的4種金屬材料表面進行加工處理,得到5種粗糙度的規格表面,即表面粗糙度分別為6.4,3.2,1.6,0.8和0.4 μm。利用圖7所示的實驗裝置測量了壓電振子在不同預壓力、不同粗糙度和不同硬度的接觸表面運動特性。通過實驗發現,在粗糙度為6.4 μm的接觸表面,無論是哪種硬度的材料,壓電振子都無法運動。即便施加了預壓力,壓電振子始終處于靜止狀態。分析其原因,歸結于粗糙度為6.4 μm的接觸表面的微觀狀態下的凹痕或者凸起大于壓電振子圓環上的質點所做橢圓運動能跨過的最大凹痕或最大凸起。針對其他4種粗糙度的接觸表面,進行了壓電振子處于空載狀態下的運動特性實驗,得到了壓電振子的運動速度隨接觸表面粗糙度的變化曲線,如圖11所示。
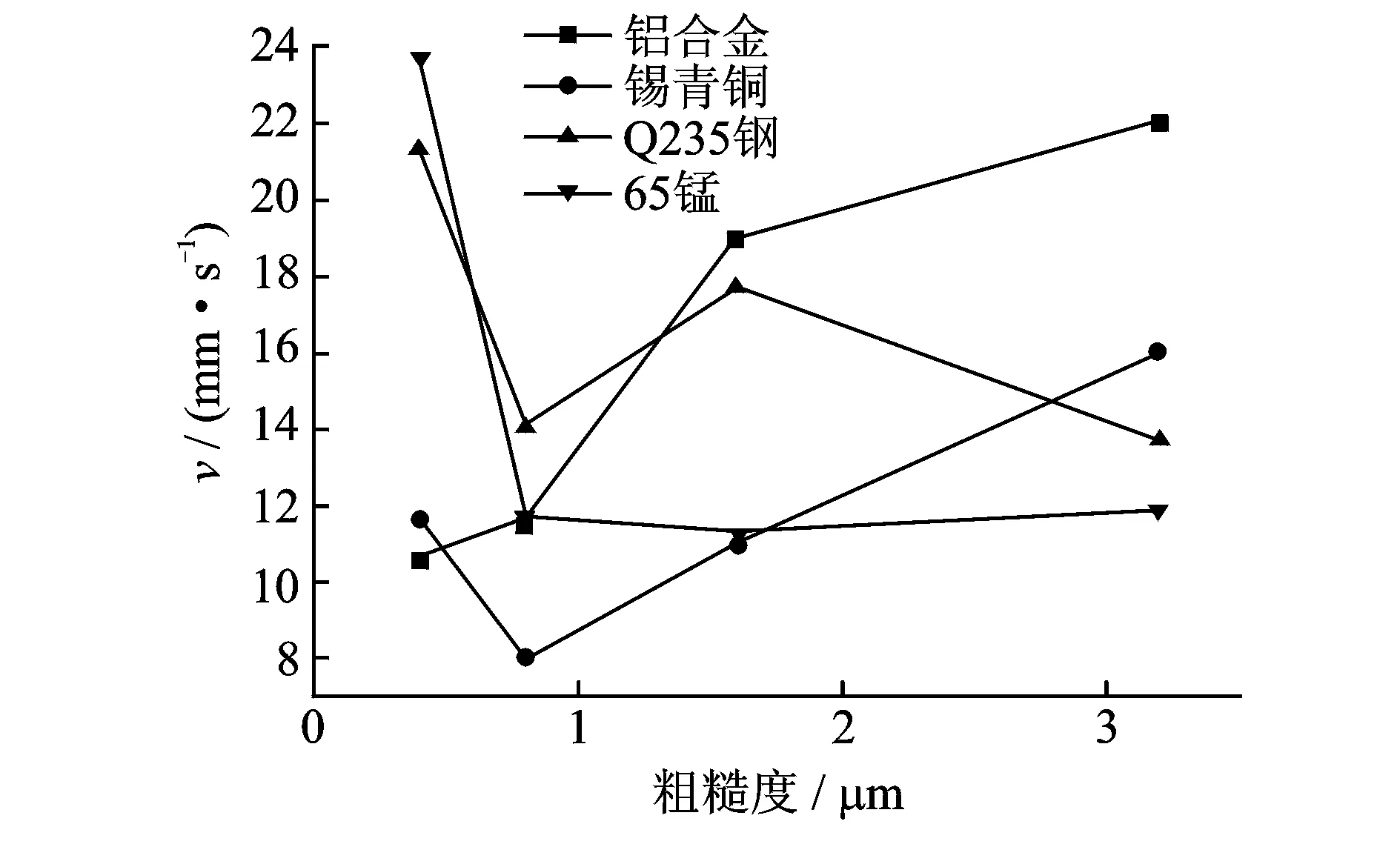
圖11 壓電振子在空載下的運動速度隨接觸表面粗糙度的變化曲線Fig.11 The relations between velocity and roughness of the contact surface for piezoelectric vibrator under un-load
由圖11可知,壓電振子處在空載狀態下,與履帶接觸表面的預壓力由自身重力提供,在不同硬度的履帶材料表面,運動速度隨粗糙度的變化趨勢相同。由于鋁合金的材質相對較軟,因此壓電振子在其接觸表面的運動特性與其他材料略有不同。當履帶接觸表面粗糙度為0.4 μm時,壓電振子在65錳表面上的運動速度最大,而在鋁合金上的運動速度最小。當履帶接觸表面粗糙度為3.2 μm時,壓電振子在鋁合金接觸表面上運動速度最大,而在65錳上的運動速度最小。可以看出,在任意一個粗糙度的履帶材料接觸表面,有一個相對應的硬度使得壓電振子的運動速度最大。因此,對于設計與壓電振子特性相匹配的履帶,需要綜合考慮履帶材料的硬度和用與壓電振子接觸的表面粗糙度。
用于履帶行駛系統的壓電振子是在負載狀態下工作的,因此研究外界不同預壓力對壓電振子在不同粗糙度的履帶接觸表面運動特性的影響十分必要。通過對壓電振子進行不同預壓力下的不同硬度和粗糙度的接觸表面運動特性實驗,得到了一系列實驗結果。通過對結果進行分析,提取了最佳預壓力下壓電振子與履帶接觸表面粗糙度的關系曲線,如圖12所示。可見,當接觸表面的粗糙度為0.4 μm或0.8 μm時,材料的硬度越大,壓電振子的運動速度也越大。需要特別指出的是鋁合金的接觸表面,壓電振子的速度比其他材料下的速度要小很多。當履帶接觸表面的粗糙度為1.6 μm或3.2 μm時,壓電振子在鋁合金和錫青銅的接觸表面運動,隨著粗糙度增加,運動速度也增加;而在Q235鋼和65錳接觸表面,運動速度基本保持不變。因此對于硬度較小的履帶材料,接觸表面粗糙度越高,壓電振子的運動速度越大;而對于硬度較高的履帶材料,接觸表面粗糙度越高,壓電振子的運動速度變化越平緩。
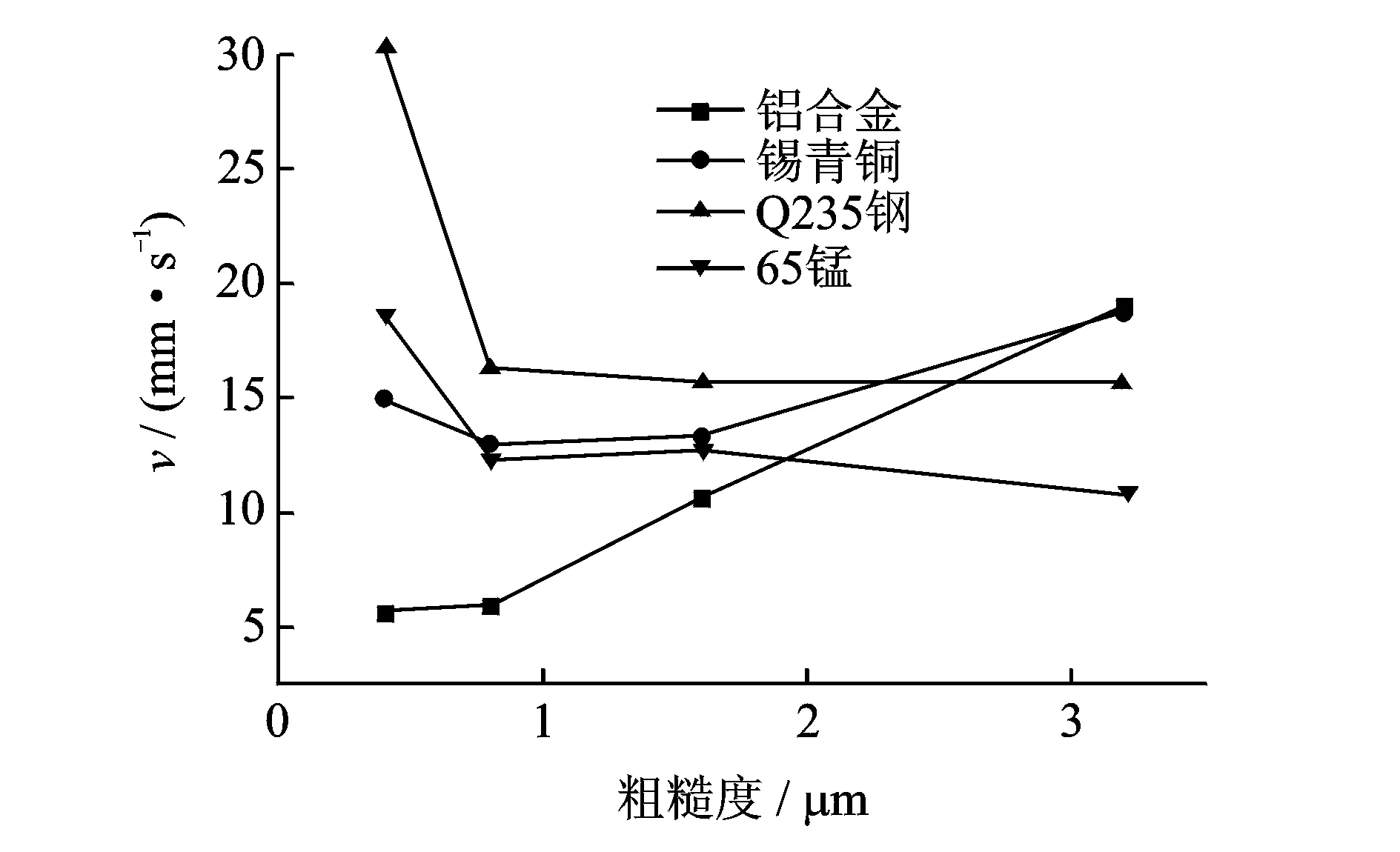
圖12 最佳預壓力下的速度隨粗糙度的變化曲線Fig.12 The relations between velocity and roughness of interface under optimized pre-pressures
綜上所述,壓電振子的運動特性與其接觸表面的材料硬度、粗糙度以及外界施加的預壓力密切相關,即設計的履帶能否高效地被壓電振子驅動與履帶材料的硬度、表面粗糙度以及與振子接觸的張緊力是密切相關的。上述實驗反向證明,重新規劃工作模態后的四環形壓電振子是可行的,只要設計的履帶合理,安裝在壓電振子的圓環表面能夠被驅動。最合適的履帶需要將材料硬度和表面粗糙度匹配起來進行設計,同時需要考慮履帶安裝在壓電振子上施加給圓環部分的預壓力以及附著在車體上的外部載荷的大小。因此,履帶的設計首先需要從壓電振子的運動特性出發,基于壓電振子與履帶材料接觸表面的摩擦行為特點,限定履帶的材料參數以及幾何參數;其次,需要考慮整個行駛系統對履帶和壓電振子兩者之間接觸表面的影響,特別是外部載荷對預壓力的影響。
4 結 論
1) 通過有限元仿真分析得到的壓電振子工作模態與測振實驗結果吻合。
2) 通過壓電振子在粗糙度約為0.025μm的履帶材料接觸表面的運動特性實驗,證明了隨著電壓升高,壓電振子的運動速度線性增加;同時,隨著接觸表面的硬度增加,壓電振子的負載能力變強。
3) 在空載狀態下,壓電振子在高粗糙度的履帶接觸表面上運動,隨著履帶材料的硬度增加,運動速度反而降低,而在低粗糙度的履帶接觸表面上運動,隨著履帶材料的硬度增加,運動速度增加。
4) 在負載狀態下,壓電振子在低硬度、高粗糙度的履帶接觸表面上的運動速度變化大,在高硬度、高粗糙度的履帶接觸表面上運動速度基本不變。無論何種履帶材料的硬度,壓電振子在低粗糙度的接觸表面上運動速度變化大。本研究工作為后續的履帶設計以及整個驅動系統的優化奠定了基礎。
[1] Bertrand R, Bruckner J, van Winnendael M.The nanokhod micro-rover-a versatile platform for surface exploration of celestial bodies[C]∥4th International Conference on Exploration and Utilisation of the Moon (ICEUM 4). Noordwijk, Netherlands: ESA Publications Division, 2000: 149-154.
[2] Kubota T, Tada K, Kunii Y. Smart manipulator actuated by ultra-sonic motors for lunar exploration[C]∥Proceedings of IEEE International Conference on Robotics and Automation: the Half-Day Workshop on Towards Autonomous Agriculture of Tomorrow. Pasadena, US: IEEE, 2008: 3576-3581.
[3] Kunii Y, Tada K, Kuroda Y, et al. Micromanipulator with lightweight and low power consumption by using ultra-sonic motor for planetary explore mission[C]∥Proceedings of 10th IEEE International Conference on Advanced Robotics (ICAR 2001), the Fundamentals: from Present to Tomorrow. Budapest, Hungary: IEEE, 2001: 457-462.
[4] 于登云.中國探月工程發展及對空間環境與材料研究的需求[J].航天器環境工程, 2012 (6):677-681.
Yu Dengyun. China's lunar exploration program and researches on space environment and materials[J]. Spacecraft Environment Engineering, 2012 (6):677-681. (in Chinese)
[5] 劉方湖, 陳建平, 馬培蓀, 等.行星探測機器人的研究現狀和發展趨勢[J].機器人,2002, 24(3): 268-275.
Liu Fanghu, Chen Jianping, Ma Peisun, et al. Research status and development trend towards planetary exploration robots[J]. Robot, 2002, 24(3): 268-275. (in Chinese)
[6] 汪永明, 余曉流, 湯文成. 輪腿式月球車移動機構構型組合設計[J]. 機械設計, 2011, 28(1): 37-40.
Wang Yongming, Yu Xiaoliu, Tang Wencheng. Configuration combination design for mobile mechanism of wheel-legged lunar rover[J]. Journal of Machine Design, 2011, 28(1): 37-40. (in Chinese)
[7] Park W, Chang Y, Lee S, et al. Prediction of the tractive performance of a flexible tracked vehicle[J]. Journal of Terramechanics, 2008, 45(1): 13-23.
[8] Quan Qiquan, Ma Shugen. Development of a modular crawler for tracked robots[J]. Advanced Robotics, 2011, 25(13-14): 1839-1849.
[9] 張森森, 王世杰, 李雄耀, 等. 月塵的性質及危害評述[J]. 地球科學: 中國地質大學學報, 2013(2): 339-350.
Zhang Sensen, Wang Shijie, Li Xiongyao, et al. Properties and harmfulness of lunar dust: a review[J]. Earth Science: Journal of China University of Geosciences, 2013(2): 339-350. (in Chinese)
[10]趙淳生.超聲電機技術與應用[M].北京:科學出版社,2007:1-11.
[11]趙淳生. 21世紀超聲電機技術展望[J]. 振動、測試與診斷,2000(1): 10-15.
Zhao Chunsheng. Ultrasonic motor techniques in the 21st century[J]. Journal of Vibration, Measurement & Diagnosis,2000(1): 10-15. (in Chinese)
[12]金家楣,張建輝,趙淳生. 新型多軸旋轉超聲電機原理[J]. 振動、測試與診斷,2008,28(4):369-372.
Jin Jiamei, Zhang Jianhui, Zhao Chunsheng. Principle of a new type of ultrasonic motor rotating around multi-axis[J]. Journal of Vibration, Measurement & Diagnosis, 2008, 28 (4): 369-372. (in Chinese)
[13]Jin Jiamei, Qian Fu, Yang Ying, et al. A piezoelectric tracked vehicle with potential application to planetary exploration[J]. Chinese Science Bulletin, 2012, 57(11): 1339-1342.
[14]金家楣,錢富,張建輝,等.履帶驅動裝置、方法及履帶式行走機構:中國,ZL201010514275.9[P]. 2011-02-02.
[15]錢富.圓環面內彎曲行波壓電執行器的研究[D]. 南京:南京航空航天大學,2011.
[16]王寅,金家楣,黃衛清. 一種面內行波旋轉超聲電機的模態試驗方法[J]. 振動、測試與診斷,2011(5):596-599.
Wang Yin, Jin Jiamei, Huang Weiqing. Modal testing method for rotary ultrasonic motor using in-plane travelling wave[J]. Journal of Vibration, Measurement & Diagnosis, 2011(5): 596-599. (in Chinese)

*國家自然科學基金資助項目(51375225);江蘇省自然科學基金資助項目(BK2012797);南京航空航天大學創新基地(實驗室)開放基金資助項目(kfjj120201);江蘇高校優勢學科建設工程資助項目
2014-11-27;
2014-12-10
10.16450/j.cnki.issn.1004-6801.2015.01.029
TH117.1
黃翀,男,1989年5月生,碩士研究生。主要研究方向為壓電驅動履帶行駛系統。曾發表《Friction behavior analysis of piezoelectric lunar tracked vehicle》(《The 11th International Workshop on Piezoelectric Materials and Applications in Actuators》.Suzhou:[s.n.],2014)等論文。 E-mail: huangchong0521@126.com
