基于觀測數據擬合的天文自主定位算法
2015-06-01 12:30:37蘇軾鵬韓云東王安國
系統工程與電子技術 2015年4期
李 偉,蘇軾鵬,韓云東,王安國
(海軍大連艦艇學院航海系,遼寧大連116018)
基于觀測數據擬合的天文自主定位算法
李 偉,蘇軾鵬,韓云東,王安國
(海軍大連艦艇學院航海系,遼寧大連116018)
根據海上天文定位原理,太陽上中天時的格林半圓時角等于測者所在位置的經度,但六分儀觀測難以確定太陽上中天的較準確時間,由此產生的經度誤差往往過大,不能滿足航海需求。采用數據擬合技術對太陽高度曲線進行擬合處理,能夠比較準確地求出太陽上中天的時間,從而給出了不需要推算船位的天文定位算法。通過海上大量實驗結果表明:該算法定位周期短、簡便易行且有利于減小偶然誤差。采用現有六分儀進行觀測,定位的緯度最大誤差為0.8,經度最大誤差為2.5,滿足海上航行的導航精度要求。
觀測數據;擬合;天文自主定位算法
0 引 言
天文導航以空間天體作為導航信標,是一種完全獨立的導航方式[1]。在晝間,太陽移線定位需要等待太陽方位出現一定幅度變化以后才可進行下一次觀測,最短需要70~90分鐘的時間。在此期間,推算艦位的積累誤差也在增加,而推算艦位作為傳統天文定位的必要參數將直接影響天文艦位解算精度[2]。
可以看出,若在白天利用觀測太陽上中天高度定位,求解緯度需要獲知太陽上中天的真高度;而要求解太陽上中天時的經度,則需要準確獲知天體上中天時的世界時。從精度上講,觀測太陽上中天高度求緯度,在熟練的操作水平下,若每隔3分鐘觀測一次,以觀測最大值和對應的時間作為依據進行計算求解,則緯度誤差一般不超過2′.0,這是因為,在天體上中天前后,其高度變化速度最慢[3]。但是在測者經度的求解上,由于太陽時角變化速度相對均勻(每分鐘約15′.0),若以相同的數據作為計算依據,則平均可產生20海里的計算誤差,這顯然不能滿足航海定位的精度要求。而對于這種性質的定位誤差,雖然數值較大,但傳統的天文作圖求解手段無法消除或改進,這是定位的主要困難[4]。
根據天文定位的基本原理,在天體上中天時,天體位于測者午圈之上,與測者天頂具有相等的天體時角,這樣測者經度就有求解的可能。而利用天體上中天前后進行觀測求緯度的方法已經較為成熟,將兩者進行有機結合便可進行計算求解實時艦位[5]。
1 基本原理
1.1 緯度的求解
在天文三角形中,天體真高度h、天體赤緯δ和測者緯度φ的關系[6]為

圖1為天文三角形示意圖。當天體上中天時,天體的地方半圓時角t=0°,然后把h替換為90°-Z(Z為天體頂距),這時,式(1)變為

整理可得

即

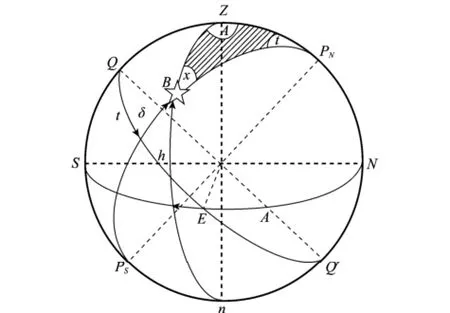
圖1 天文三角形
圖2 為測者緯度、天體赤緯和上中天方位關系示意圖。為方便使用,現對圖2所示子午頂距與太陽方位關系進行如下規定[7]:
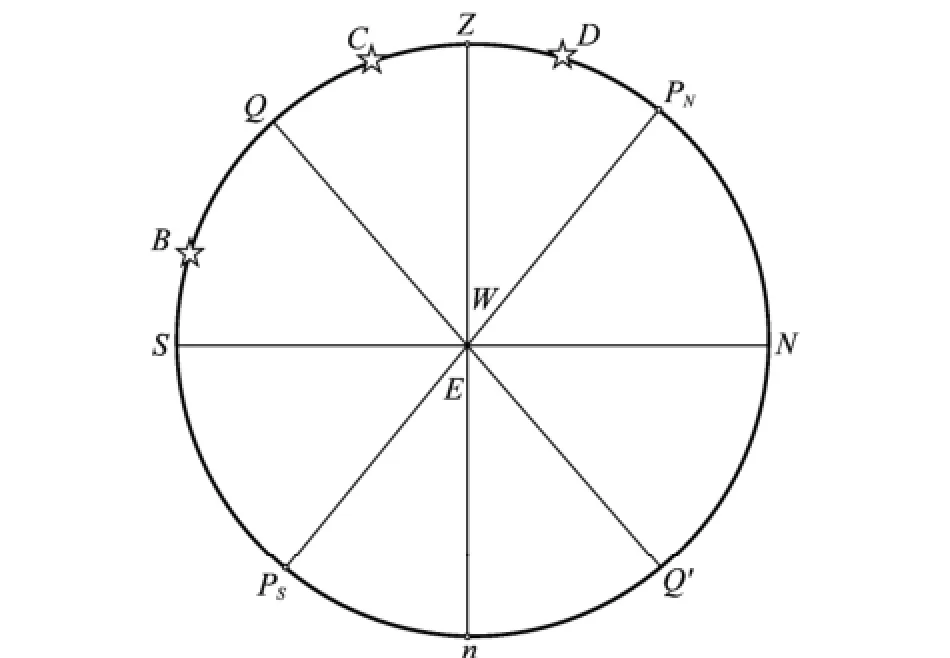
圖2 測者緯度、天體赤緯和上中天方位關系示意圖
上中天時,若天體方位為北,其子午頂距Z的命名為南;若天體方位為南,其子午頂距Z的命名為北。那么,觀測天體子午高求緯度可歸納為
當Z與δ同名時

緯度方向與Z(或δ)相同。
當Z與δ異名時

大項減小項,緯度方向與大項相同(Z或δ)。
1.2 經度的求解
在圖2中,天體上中天時,天體與測者天頂同位于測者午圈之上,具有相同的天體時角[8]。根據天球定義和海上天文定位原理,此時測者經度就等于天體的格林半圓時角。
若獲知天體上中天時的世界時,則可根據天體視運動規律,查表或計算求得天體的格林西行時角tG,進而求得測者經度λ[9]。
即
當tG<180°時,λ(西經)=tG;
當tG>180°時,λ(東經)=360°-tG。
根據天體周日視運動和球面幾何原理,對于特定緯度的測者來說,天體高度公式[10]可表示為

式中,t為太陽地方半圓時角。
以平均緯度(45°)和太陽的平均赤緯(0°)代入式(7),并把時角表示為世界時T(以時為單位)的形式,可得太陽真高度h(單位為度,以0°經線測者為例)的數學表達式為

式中,η為時差,最大不超過7分鐘,可由年歷查得。據此,由三角函數和反三角函數的性質可知:當世界時為12時前后時,太陽高度達到最大值[11]。
以平均時差代入式(8)可得太陽高度關于時間(11時50分至12時10分)的變化曲線,如圖3中“原高度曲線”所示。
由圖3可以看出,在(12-1/6,12+1/6)的范圍內,太陽真高度關于時間的函數圖像在平面坐標系內是一段連續可導的平滑曲線,對其按(T-12)的冪進行泰勒公式展開[12]


由泰勒公式性質可知,當T接近于12時,拉格朗日型余項是比(T-12)3高階的無窮小,而(T-12)3最大為(1/6)3(°),也就是說,在(T-12±1/6)時,式(9)可寫為

表達式變為關于T的二次函數曲線。據此,在區間(T-1/6,T+1/6)上等間距取5個點(如表1所示)進行數據擬合,在Matlab集成環境下,可得基于最小二乘的太陽擬合高度的二次曲線表達式為

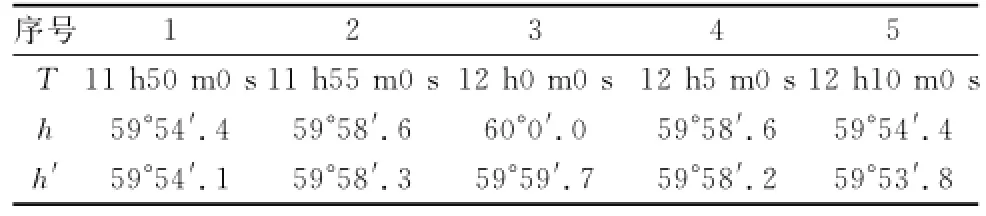
表1 天體真高度與擬合高度對比
由表1數據看以看到:擬合高度曲線的最大值與原高度曲線最大值(即為子午高)只有0′.3的誤差,對應產生同樣大小的緯度誤差;而在時間上,二次曲線的對稱軸為11.998時,即為11 h59 m53 s,對應產生的經度誤差為1′.6。
2 誤差分析
在測者靜止的情況下:
對于緯度,算法采用求擬合函數極值的方法求解太陽上中天時的頂距,而太陽赤緯又隨時間變化不明顯(在分點時,20分鐘最大變化量為0′.3),故緯度誤差主要取決于擬合高度曲線的最大值與真實值的誤差。在不考慮觀測誤差的情況下,由式(9)分析,誤差不應超過1/216度即0′.4。在極端情況下,若觀測值均同向偏離0′.2,則可導致0′.6的緯度定位誤差。
對于經度,由式(8)和圖3可知,太陽真高度曲線關于其上中天時刻對稱,而求解經度正是通過擬合其對稱軸的方法獲取。所以,經度誤差的大小主要取決于觀測數據是否真實客觀。若上中天前的觀測值普遍偏大而上中天后的觀測值普遍偏小,則擬合曲線對稱軸左移,反之則右移。由于太陽時角變化較快,所以,經度誤差對于這種偏離較為敏感。對于熟練的測者,在極端情況下,若一側觀測高度均偏高(或偏低)0′.2而另一側觀測高度均偏低(或偏高)0′.2,則可導致對稱軸左移(或右移)10 s,對應產生2′.5的經度定位誤差。
在測者移動的情況下:
在移動的載體上進行觀測,可按照修正異頂差的方法,在觀測時間不變的前提下,根據載體移動的航跡向和對地航速,把所有觀測高度修正到最后一次觀測的同頂高,這樣可定出最后一次觀測時的天文艦位。
修正異頂差的誤差,若采用查表的方法,則主要來源于把大地球面當做平面來處理的計算誤差。經測算,在30分鐘內,航速不超過50 kn(節)的情況下,最大誤差不超過0′.2。若采用球面三角形進行計算,則基本不產生修正誤差。
由定位誤差分析可知,修正誤差主要對緯度的定位精度產生影響。
3 擬合算例
2013年4月13日,具有熟練觀測水平的某測者在某次測天定位實踐中,在太陽上中天前后連續觀測5組數據(時間間隔無須相等,數值如表2所示),由羅經測得太陽上中天時方位為北。

表2 某次太陽上中天前后的觀測數據
對表2數據進行最小二乘的數據擬合,為保證擬合精度,橫軸時間單位精確到分鐘。擬合后可得圖4所示的二次曲線,其表達式為

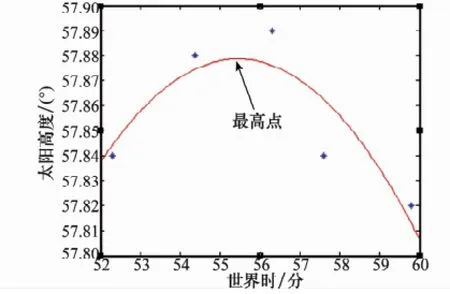
圖4 太陽真高度最小二乘法的數據擬合
根據擬合曲線表達式可得,太陽在世界時3 h 55 m27 s時達到最大值57°52′.8。
根據太陽上中天時的世界時可求得此時測者經度為121°16′.5E;太陽赤緯為9°5′.0N。
由式(5)可得此時測者緯度為41°12′.2N。
在2012年鄭和艦環球航行的遠航實習教學中,在不同緯度的海區進行了5組擬合實驗,表3~表7是擬合艦位與差分全球定位系統(global position system,GPS)艦位對比結果。

表3 2012年5月7日,GPS讀數:φ38°46′.0N,λ121°.16′.0E

表4 2012年5月29日,GPS讀數:φ4°12′.0N,λ91°.36′.0E

表5 2012年6月30日,GPS讀數:φ46°30′.0N,λ13°.16′.0W

緯度誤差:0′.6;經度誤差:2′.2。

表7 2012年9月2日,GPS讀數:φ21°24′.0S,λ155°.38′.0E
(2)GPS數據的解算模型為WGS-84坐標系下的地球橢球體,而天文定位的解算模型為大地球體,二者在局部的最大位置誤差為0′.5。
4 結 論
大量實驗結果表明:
(1)可利用數據擬合的方法求解太陽上中天時的時間進行船舶定位,對于熟練的觀測者來說,緯度最大定位誤差為0′.8,經度最大定位誤差為2′.5。
(2)該方法可最大限度地減小觀測的偶然誤差。根據偶然誤差的正態分布規律,其觀測值應該對稱分布在真值曲線周圍。而從最小二乘的原理和實例數據可以看出,離散分步的觀測值均勻散落在擬合曲線周圍,有效減小了偶然誤差對于定位精度的影響。
(3)為保證觀測的及時有效,應提前檢查規正六分儀、測定指標差,確保觀測數據可用。若太陽上中天方位為南,應該在太陽圓周方位到達170左右即開始觀測采樣;若太陽上中天方位為北,應該在太陽圓周方位到達010左右即開始觀測采樣。采樣數據務求準確,采樣時間間隔不必相等。
至此,我們可以得到如下結論:用數據擬合的方法確定太陽上中天的高度和時間的方法在理論上是完全可行的,其定位精度完全可以滿足一般航海的要求。這種天文自主定位算法不需要推算艦位,沒有積累誤差,為修正推算艦位和其他形式的天文定位提供了必不可少的前提,可有效提升艦船在大洋航行的自主導航能力。
[1]Wang A G,Jia C Y,Sun P.Precise apparent position calculation of star in navigation[J].Journal of Traffic and Transportation Engineering,2004,4(4):117 120.(王安國,賈傳熒,孫鵬.航用恒星視位置高精度計算[J].交通運輸工程學報,2004,4(4):117 120.)
[2]Wang G R,Liu Q.A new algorithm of calculating the apparent place of fixed star[J].Applied Science and Technology,2006,33(2):36 39.(王桂如,劉強.一種求恒星視位置的新算法[J].應用科技,2006,33(2):36 39.)
[3]Titterton D H,Weston J I.Strap down inertial navigation technology[M].London:Peter Peregrinus Ltd,1997:56 77.
[4]US Naval observatory.Celestial augmentation of inertial navigation systems:a robust navigation alternative[R].Washington:SPAWAR System Center,2000.
[5]Liebe C C,Gromov K,Meller D M.Toward a stellar gyroscope for spacecraft attitude determination[J].Journal of Guidance Control and Dynamics,2004,27(1):91 99.
[6]Berman C M.Static thrust study of an airboat propeller[R].USA:AIAA 2003 113,2003.
[7]Atkinson D,Agnew J,Miller M.The B-2 navigation system[C]∥Proc.of the IEEE Aerospace and Electronics Conference,1993:345 354.
[8]Kaplan G H.Determining the position and motion of a vessel from celestial observations[J].Navigation Journal of the Institute of Navigation,1995,42(4):631 648.
[9]Psiaki M L.Autonomous orbit determination for two spacecraft from relative position measurements[J].Journal of Guidance Control and Dynamics,1999,22(2):305 312.
[10]Hye Y,Oung K,Joh J.Self-organizing guide star selection algorithm for star trackers:thinning method[C]∥Proc.of the IEEE Aerospace Conference Proceedings,2002:2275 2283.
[11]Bae B S,Schutz E.Geosciences laser altimeter system precision altitude determination[R].Center for Space Research:The University of Texas at Austin,2002:148 154.
[12]Colozza A J.APEX 3D propeller test preliminary design[R].USA:NASA/CR 2002(21):1866.
Data fitting based algorithm for astronomy autonomous positioning according to observation data
LI Wei,SU Shi-peng,HAN Yun-dong,WANG An-guo
(Navigation Department,Dalian Naval Academy,Dalian 116018,China)
According to maritime astronomy positioning principle,the special nature of the sun can be used for astronomical positioning.When the sun transits,the green semicircle angle is equal to observer’s longitude.According to the law of the sun’s apparent motion,when one uses a sextant,it is difficult to determine the transit time of the sun,and the longitude error will be introduced.In order to solve this problem,combined with data fitting techniques,first the feasibility of fitting solar altitude curve is discussed and demonstrated,then a celestial autonomous positioning method is proposed that doesn’t need projected position.Experimental results showed that the positioning cycle with the algorithm is short,it is simple to carry out and helps to reduce accidental errors.Under skilled observation level,maximum error of latitude and longitude are 0.8 and 2.5,which can fully meet the needs of the general maritime activities.
observation data;fitting;astronomy autonomous positioning algorithm
P 128.2
A
10.3969/j.issn.1001-506X.2015.04.28
李 偉(1980 ),男,講師,博士研究生,主要研究方向為現代天文導航技術。E-mail:apuredrop@163.com
蘇軾鵬(1980 ),男,講師,碩士,主要研究方向為現代氣象導航技術。E-mail:apuredrop@tom.com
韓云東(1977 ),男,副教授,博士,主要研究方向為現代電子導航技術。E-mail:gyro-han@163.com
王安國(1954 ),男,教授,博士,主要研究方向為現代天文導航技術。E-mail:apuredrop@sina.com
1001-506X(2015)04-0907-04
2014- 03- 14;
2014- 08- 26;網絡優先出版日期:2014- 10- 28。
網絡優先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141028.1618.008.html
國家科技支撐計劃(2012BAH36B00)資助課題