作戰仿真傳感器模型探測處理通用方法
2015-06-01 12:30:37李元鋒劉建平石成英
系統工程與電子技術 2015年4期
關鍵詞:模型
李元鋒,劉建平,石成英,王 偉
(1.第二炮兵工程大學103教研室,陜西西安710025;2.中國人民解放軍61683部隊,北京100094;3.第二炮兵工程大學906教研室,陜西西安710025)
作戰仿真傳感器模型探測處理通用方法
李元鋒1,劉建平2,石成英1,王 偉3
(1.第二炮兵工程大學103教研室,陜西西安710025;2.中國人民解放軍61683部隊,北京100094;3.第二炮兵工程大學906教研室,陜西西安710025)
指揮、控制、通信、計算機、情報、監視和偵察(command,control,communication,computer,intelligence,surveillance and reconnaissance,C4ISR)模型是作戰仿真系統的中樞和靈魂,是作戰仿真的重點和難點。在分析作戰仿真情報、監視和偵察模型中的傳感器模型對于探測處理的建模需求基礎上,提出了傳感器模型探測處理的通用方法,介紹了所提方法的整體流程,通過計算過程詳細說明了所提方法的9個方面。通過模型的輸入輸出數據的結構并結合仿真驗證實驗,說明了該方法的適用性和通用性,提高了作戰仿真傳感器模型的運行效率,節約了開發成本,并為ISR建模與仿真提供了參考方法。
作戰仿真;傳感器模型;探測處理;通用方法
0 引 言
作戰仿真[13]是研究現代戰爭、創新作戰理論的科學方法,是論證作戰方案、分析軍事行動、驗證軍事效益的定性與定量分析的有效手段。指揮、控制、通信、計算機、情報、監視和偵察(command,control,communication,computer,intelligence,surveillance and reconnaissance,C4ISR)模型是作戰仿真系統的中樞和靈魂,是連接傳感器、作戰平臺、指揮人員等一切作戰模型的紐帶,是作戰仿真運行的基礎,是作戰仿真的重點和難點,不僅需要對各類傳感器、信息傳輸和處理系統進行建模,還需要對指控行為進行建模,構建觀察、判斷、決策、行動(observe,orient,decide and act,OODA)[4]的信息循環過程。一般傳感器建模[512]中探測處理方法是針對不同類別傳感器,針對其工作類型、功能要求對探測過程分別進行建模,開發成本高,周期長,且在仿真時需要處理的交互計算量大,不夠高效,在建模時如果能夠使用統一的探測處理方法進行建模,那么無疑會減少建模開發成本和時間,并且能夠降低運算量,能夠提高經濟效益和運行效率。
傳感器生產的情報產品種類繁多,工作模式各異,主要包括[13]:
(1)圖像情報(紅外、光電、合成孔徑);
(2)信號情報(電子情報、通信情報);
(3)測量特征情報(移動目標指示);
(4)人力資源情報。
在本文中,傳感器模型探測處理通用方法適用于7類傳感器,分別為電子情報傳感器、雷達傳感器、紅外傳感器、通信情報傳感器、光學情報傳感器、主動聲納和被動聲納。
1 傳感器模型建模需求
傳感器能收集各種各樣的目標信息,包括物理情報數據(如目標位置、海拔、深度、航向、速度、類別、身份和戰斗毀傷狀態等)和行動情報數據(如戰場威脅排序、威脅就緒狀態、威脅意圖等),此外,傳感器的有效探測距離和探測概率在很大程度上取決于其運行的電磁、聲學和自然環境(如地形、水深和大氣海洋分界面等)。因此傳感器模型必須足夠簡單,既要滿足想定規模和快速運行的要求,同時又必須足夠精細,能夠解決用戶的業務分析問題,在這種平衡制約條件下,傳感器模型必須滿足下列需求:
(1)探測概率作為輸入參數由用戶控制;
(2)傳感器可搭載于空間、空中、海面、海下或陸地平臺上,每個傳感器系統的探測范圍隨搭載平臺運動;
(3)影響傳感器覆蓋范圍的因素有:距離、方位角、俯仰角、目標接近速度、其他相關的目標信號增強因素等,對這些因素進行不同程度的限制,決定了復雜的、三維的傳感器覆蓋范圍;
(4)假設某個傳感器系統覆蓋范圍內存在目標,使用不同形式的“掃描率”探測模型。在此模型中,每個Δt(Δt為連續探測時機間的間隔)與收集不同類型數據的探測概率相關。對Δt和數據收集概率的選擇通常為可以獲得的、用于傳感器系統、目標和感興趣區域自然環境的瞬時概率和累積概率的符合條件對象。
2 傳感器模型探測處理通用方法
2.1 方法流程
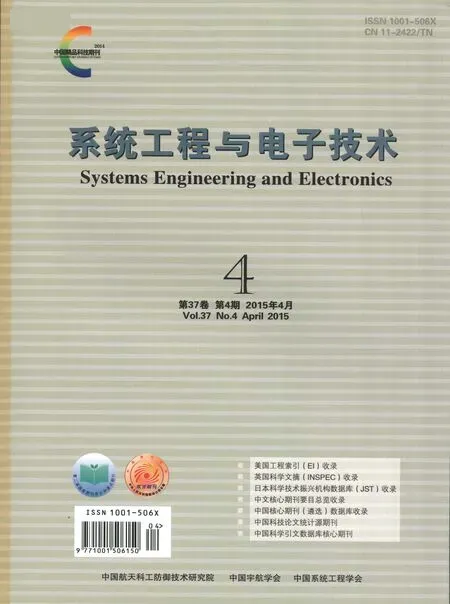
建模總體方法為,通過每個活動的傳感器對目標進行掃描,對于每一個目標,首先檢測傳感器的掃描時間和目標活動時間是否匹配,其次為了方便輸入和簡化計算目的,對于傳感器搭載的平臺進行適當坐標轉換,隨后對于目標的作戰隸屬方、目標類型進行目標適應性檢測,并對傳感器的視場進行檢查,針對特定類型傳感器(如雷達、聲納、紅外等傳感器)的特定屬性進行檢查(考慮計算環境、電子干擾因素影響等),如果通過檢查,計算傳感器的累積探測概率,并根據跟蹤目標軌跡的性能計算跟蹤質量,最后生成探測報告,如圖1所示。
2.2 傳感掃描時間檢查
傳感器必須具有實時探測目標的能力,在傳感器掃描前,傳感器搭載平臺必須處于激活狀態且傳感器必須處于工作狀態,傳感器的掃描時間必須為仿真系統步長時間的整數倍。舉例說明,想定仿真時間步長為3 s,傳感器掃描周期為6 s,第一次掃描時間為3 s,那么傳感器將在3 s,9 s,15 s,21 s等時間進行掃描。如果步長周期為7 s,那么掃描時間為3 s,12 s,15 s,21 s等。
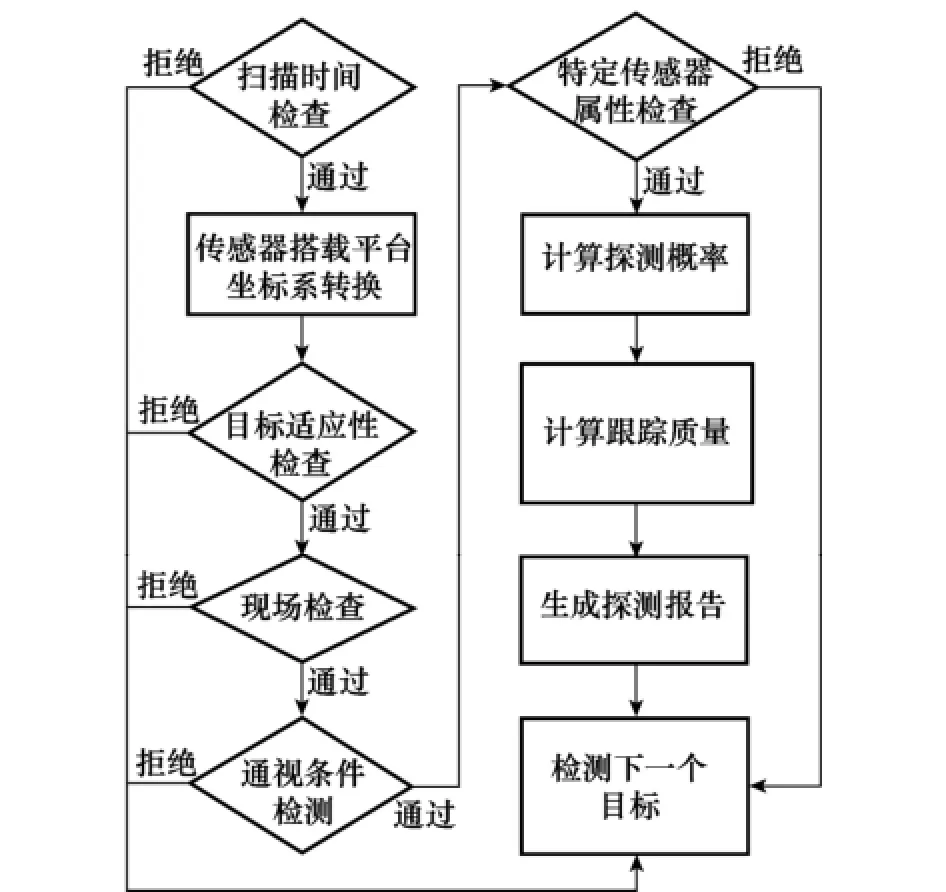
圖1 傳感器模型探測處理通用方法
2.3 傳感器搭載平臺坐標轉換
(1)使用坐標系
在仿真中,傳感器的坐標系使用直接關系到傳感器視場(field of view,FOV)的計算以及傳感器與目標視線位置的計算是否方便,考慮到計算的方便性和輸入數據的方便性兩個方面,使用下列坐標系:
①地心直角坐標系(earth centered erath fixed,ECEF)[14]
ECEF隨地球的旋轉而旋轉,它以地心為原點,Z軸指向北極點,X軸和Y軸位于地球赤道平面內,X軸指向赤道與本初子午線的交點,Y軸指向赤道與90°子午線的交點,該坐標系在系統進行運算時較為方便,其他坐標系一律轉換為該坐標系進行計算。
② 速度軸坐標系
速度軸坐標系以平臺為原點,X軸沿平臺速度矢量方向,Y軸垂直于X軸指向左側,Z軸與X、Y軸構成右手坐標系,該坐標系能夠方便地設置運動平臺的屬性數據。
③東-北-天坐標系(east-north-up,ENU)[15]
ENU以傳感器搭載平臺點(以經緯度定義)為原點,X軸指向北方向,Y軸指向東方向,Z軸延當地鉛垂方向指向上。X軸和Y軸定義了ENU的地平面,ENU一般用于設置靜止平臺的屬性數據。
一般在輸入傳感器搭載平臺位置時,用戶習慣使用速度軸坐標系和ENU進行輸入,但模型在系統中參與計算時,為了簡化計算過程,需要將速度軸坐標系和ENU轉換為ECEF。由于速度軸坐標系使用較多,在本文中給出速度坐標系和ECEF的轉換關系和轉換過程,轉換關系如圖2所示。
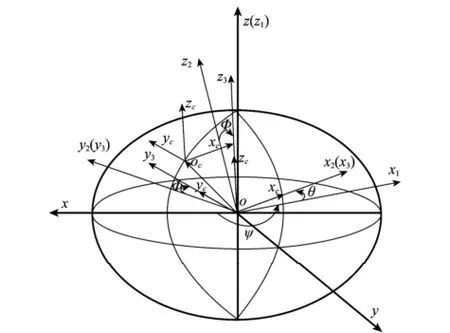
圖2 速度軸坐標系與ECEF轉換關系
假設傳感器搭載平臺的瞬時的中心位于OC點,坐標系為XC-YC-ZC,ECEF原點為O,坐標系為X-Y-Z,Ψ為XC軸在平面XOY內的投影與X軸之間的夾角,Θ為XC軸與平面XOY之間的夾角,Φ為YC軸與平面XOY面之間的夾角,轉換步驟如下:
步驟1 先將速度軸坐標系沿著地心矢徑方向平移到地心O點。
步驟2 第一次旋轉,繞ECEF的Z軸旋轉Ψ角度,形成新的坐標系O-X1Y1Z1,如圖2所示。
步驟3 第二次旋轉,繞新的坐標系的Y 1軸旋轉Θ角度,使X 2軸與XC軸重合,形成新的坐標系O-X2Y2Z2,如圖2所示。
步驟4 第三次旋轉,繞新坐標系X2旋轉Φ角度,使得Y2軸、Z2軸分別與YC軸、ZC軸重合。至此,就完成了地心直角坐標系向速度軸坐標系的轉換。
從速度坐標到ECEF 的轉換矩陣為

2.4 目標適應性檢查
目標適應性檢查需要檢測目標的作戰方和目標可探測信號與傳感器探測特征的對應關系,如果目標是友方或己方目標,那么不需要進行探測計算。目標可探測信號和傳感器探測特征必須滿足對應關系,如果不滿足條件,則不能進行探測。如圖3所示,圖3中實線的雙向箭頭表示探測與被探測關系,虛線表示不僅是一種傳感器探測特征類型,而且是一種被探測信號,如雷達本身是電磁發射源,同時也能夠探測雷達反射信號,主動聲納本身既是聲源,也可以探測聲波的反射。
圖3 目標發射信號與傳感器探測特征關系
同時,還需要檢查傳感器和目標的距離(絕對、相對)閾值、目標速度(絕對、相對)閾值、目標高度(絕對、相對)閾值等條件,如果檢查通過,則進行下一項檢查。
2.5 傳感器視場檢查
根據傳感器視場類型,將傳感器視場類型設為3種,分別為矩形、圓形和無。
(1)矩形視場
如果傳感器是矩形視場,需要通過俯仰角、方位角和傳感器的最大探測距離這3個參數來確定目標是否處于傳感器探測區域中。方位角的測量以傳感器視場中心軸矢量在水平面的投影為中心,俯仰角的測量是以視場中心軸矢量在垂直平面上投影為中心,計算過程如下:
首先檢測目標到傳感器的距離為

式中,range為傳感器到目標的距離;D為傳感器在速度軸坐標系中指向目標的矢量,表示為

式中,Pt為目標在ECEF中的位置矢量;Ps為傳感器在ECEF中的位置矢量。如果range計算所得值小于傳感器的最大觀察距離,那么目標就處在傳感器的探測區域內,可以進行探測。
將傳感器到目標的矢量轉換為速度軸坐標系,由此計算目標的方位角和俯仰角。

式中,D={xd,yd,zd}T為ECEF傳感器到目標的矢量;Ts為ECEF到速度軸坐標系的轉換矩陣,如式(1)所示。假設α為目標方位角,β為目標俯仰角,計算公式為

(2)圓形視場
如果傳感器視場是圓形視場,那么需要測度兩個因素,一是傳感器與目標的距離,另一個是傳感器目標矢量與視場中心軸矢量的夾角,計算方法為

式中,α為傳感器目標矢量與視場中心軸矢量之間的夾角;B為視場中心軸矢量對應的單位矢量;Ds為速度軸坐標系中的傳感器目標矢量。
如果計算的角度小于傳感器定義的視場角,那么通過視場檢查。
(3)無
當視場類型為無時,不需要進行視場檢查。
2.6 通視條件檢查
通視條件檢查一般檢測探測目標和傳感器之間是否有地形遮蔽。設置地球曲率放大倍數結合傳感器的高度、位置和目標的高度、位置進行計算并與檢查條件對比,如果可以通視則通過檢查。一般情況,對于雷達和電子信號傳感器地球曲率放大倍數通常設置為4/3,對于光學和紅外傳感器,一般設置為1。
2.7 特定類型傳感器屬性檢查
不同領域的傳感器,具有不同的功能和類型,針對不同類型傳感器,需要檢驗不同的特征屬性、環境、干擾因素影響檢查,以雷達和聲納的主要特征屬性[1618]進行比較說明。
(1)雷達
雷達傳感器對外發送電磁信號,并能根據回波計算出目標的位置和速度等信息。對于在距離r的目標,雷達收到的回波信號能量計算公式為

式中,PR為雷達接收功率;PT為雷達發射功率;G=4πAe/λ2為天線增益;1/4πr2為回波的空間衰減因子;Ae為天線有效面積;σ為目標橫截面面積。那么雷達探測距離方程為

式中,S為雷達接收功率PR最小值。其中,雷達接收到的目標回波能量必須大于等于S值,才有可能探測到目標。從雷達距離方程,可推導出式(9),說明了RCS值為σ0時的雷達目標距離r0與RCS值為σ1時的雷達目標距離r1的關系。

對于比較小的目標(雷達橫截面非常小),其RCS值會隨雷達頻率在某個頻段范圍內發生變化而變化。假設雷達頻率為f0(波長為λ0)時目標的RCS值為σ0,雷達頻率為f1(波長為λ1)時,目標的RCS值為σ1,兩個RCS值之間的關系非常復雜,但可以簡單表示為

式中,在1 GHz≤f1≤10 GHz時e=2,否則e=0。已知雷達頻率為f0時,某個小目標的RCS值為σ0,可用式(10)計算出在雷達頻率為f1時,該小目標的RCS值為σ1。需要指出,雷達頻率的變化只適用于RCS值比較小的情況,不應當導致RCS值增加至3~30 m2,因而,如果頻率的變化導致計算出的σ1變化幅度超過了這個數值,應使用式(11)。

在雷達傳感器中,需要重點檢查的是信噪比參數,如果雷達接收功率過小,那么無法看到目標。同時還需要考慮大氣吸收損耗、多路徑傳輸以及地雜波和海雜波的影響計算信噪比。如果處于干擾環境中,需要信干比計算判定探測概率。
(2)聲納
以主動聲納為例進行說明,對主動聲納傳感器而言,聲納方程的表現形式為

式中,Ls為目標發出的聲源級;Nw為從目標到聲納接收機的傳播損失;NTS為目標強度,即目標反射的聲音強度;LN為聲納噪聲級;AG為聲納基陣的增益,表示基陣能抑制的噪聲;DT為探測閾值,用于限定探測的S/N;SE為超出的信號值,為接收到的S/N數值與必要的S/N數值間的差值;LS-2Nw+NTS代表聲納接收機能接收到的信號級;LN-AG代表聲納處理后剩下的噪聲級,這5個參數共同計算出信噪比,以供聲納進行探測處理。與被動聲納方程相同,主動聲納方程中的所有參數都是隨機變量(各變量互相獨立,以dB為單位,都符合正態分布),主動聲納方程是各參數平均值之和。類似地可用方程式描述這些隨機變量間的不同關系,從而可以確定SE的概率密度。此概率密度函數可用于計算瞬時探測概率,即密度函數曲線下SE≥0的面積。在聲納模型中,還需要考慮水位、潮流、海流、水聲、噪聲等環境、干擾因素對于信號傳播造成的影響。
2.8 探測概率的計算
傳感器的累積(多次)探測概率(cumulative probability of detection,CDP)指的是該傳感器在以[t1,t2]定義的搜索時段內,至少探測到目標一次的概率。CDP的計算依賴于瞬時探測概率(假設此概率在t1與t2間的任何時刻都已知),以及針對時間[t1,t2]內發生的各單次探測間的相關性所作出合理性假設。由于CDP中包含了各單次探測間的統計上的相關性,對作戰情報、搜索和監視效能具有更大影響,因而CDP比單次探測概率在作戰仿真分析中具有更重要的作用。
累計探測概率考慮到輸入參數配置間的關聯性,假設傳感器模型的單次探測概率為Pd,假設后臺探測處理過程的各探測時段完全相關,但其間被一系列波動(例如突變)中斷,這些波動在連續的完全相關的時段間引入了獨立性。每一個完全相關的時段T是符合均值為1/λ的指數分布的隨機變量,那么傳感器第n次探測的累積探測概率CDP為
式中,β=1-e-λΔt;Δt為傳感器探測時間間隔,并假定Pd(i)呈單峰分布,換言之,從第1次到第M次探測,Pd(i)不會降低,從第M次探測到更高,Pd(i)不再升高。
2.9 計算目標軌跡跟蹤質量
采用蒙特卡羅方法對傳感器的目標跟蹤質量進行處理,設置跟蹤模式丟失目標軌跡的概率、搜索模式的掃描間隔等參數,結合傳感器自身的分辨力參數,生成對于目標的跟蹤質量。
2.10 生成探測報告
根據探測的情報信息生成相應的目標報告,可以為目標位置報告、目標航線和速度的報告、目標海拔和高度的報告、目標戰術ID的報告以及目標威脅等級的報告等。
3 模型輸入輸出數據
3.1 輸入數據結構
傳感器模型的輸入數據結構如圖4所示,主要包括兩大部分:第一部分為通用傳感器屬性部分,包括傳感器的調度計劃、性能屬性參數、報告屬性和能夠被其他類型傳感器探測的屬性。第二部分為指定類型傳感器特殊屬性部分,如針對雷達傳感器,需要設置基準雷達橫截面面積(radar cross section,RCS)、探測信號類型、工作媒介、基準工作頻率、發射電磁波段、發射功率等參數。
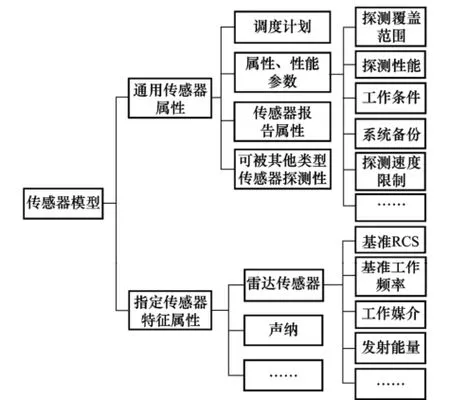
圖4 傳感器模型輸入數據
3.2 輸出數據
根據傳感器的輸入數據模型設置傳感器模型輸出,包括3類輸出指標,即
(1)事件發生時間;
(2)在一定時間范圍發生的事件數量;
(3)在某個時間點事件的狀態值。
事件發生時間類指標包括第一探測時間、第一次目標分類時間、第一次目標辨識時間等。在一定時間范圍內的事件發生數量包括監視探測的事件數量、監視分類事件數量等。在某個時間點的時間狀態值包括第一次探測距離、第一次目標分類距離等。
4 仿真實驗驗證
為了說明傳感器模型通用探測處理方法的有效性和適用性,將傳感器模型寫入基于Agent的作戰仿真系統,該系統使用平臺為Windows操作系統,采用VC++語言編寫,能夠體現作戰任務級紅藍雙方戰場空間實體的對抗過程并采集響應的探測、跟蹤、交戰結果。
設置紅藍雙方對抗想定,紅方戰場空間實體包括1個艦隊(由航母、驅逐艦、護衛艦、核潛艇組成),艦隊搭載預警機中隊、直升機預警中隊和戰斗機中隊。藍方戰場空間實體包括1個艦隊(由航母、巡洋艦、驅逐艦、支援艦組成),艦隊搭載預警機中隊、電子干擾中隊和戰斗機中隊。紅藍雙方主要使用雷達、聲納等傳感器進行探測交互,通過“探測-決策 打擊 評估”的流程實現海空交戰,想定的高級作戰概念圖(operation view 1,OV-1)如圖5所示。
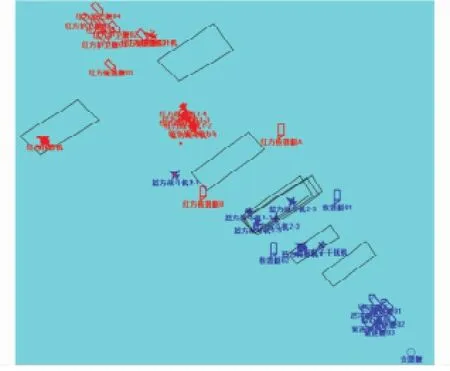
圖5 紅藍雙方高級作戰概念圖(OV-1)
以紅方單個機載雷達和藍方艦船單個主動聲納為例,說明模型的輸入參數。紅方單個機載雷達基準探測距離為400 km,基準RCS為3 m2,探測包絡設置為楔形,探測方位角為120°,俯仰角范圍為[-60°,60°],基本工作頻率設置為5 000 MHz,發射能量設置為6 k W。藍方艦船主動聲納最大探測距離設置為15 km,最小探測距離設置為1 km,發射信號功率為100 W。傳感器通過通用探測處理對目標進行交互,實現探測跟蹤、分類辨識等功能。
采集的輸出指標主要為探測性能指標,包括紅方傳感器的第一目標探測時間、第一目標探測距離、第一次目標分類時間、第一次目標辨識時間、監視探測、監視分類、監視辨識事件數量等。
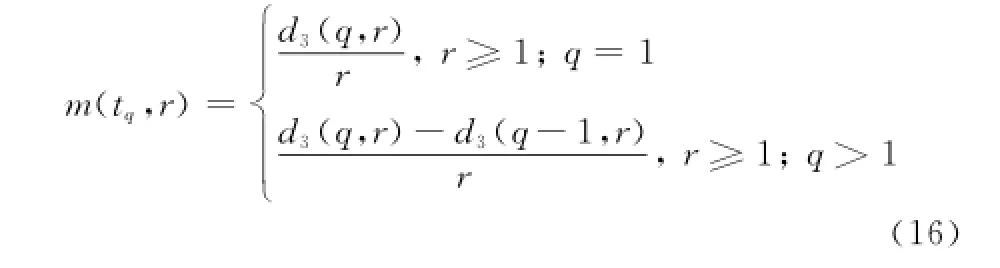
以監視探測事件數量類指標為例,說明其計算方法。假設C(tq,r)是記錄了r個樣本數量時間間隔為[tq-1,tq](或者q=1時,時間間隔為[0,t1])內發生指定事件類型的數量。在仿真運行過程中存儲的中間數據為
從式(15)的中間數據計算最終的事件數量和報告時間tq的關系,tq時刻r個運行樣本評估指標的樣本均值m計算公式為
tq時刻r個運行樣本評估指標的樣本標準差s的計算公式為
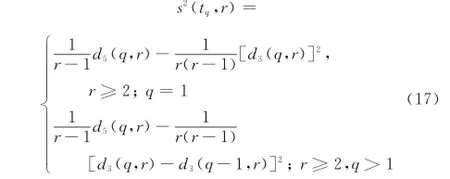
在95%置信度情況下樣本均值m的樣本標準方差計算公式為

想定持續時間為4 h,時間步長為30 s,使用隨機數運行多個樣本,運行樣本數量為100次。列出部分采集指標輸出結果。
第一次探測時間指標的部分輸出如表1所示。
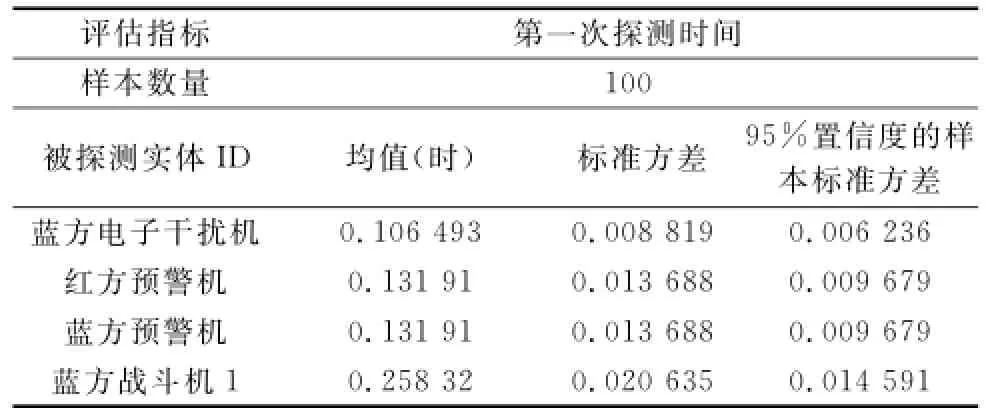
表1 第一次探測時間指標部分輸出
第一次探測距離指標的部分輸出如表2所示。
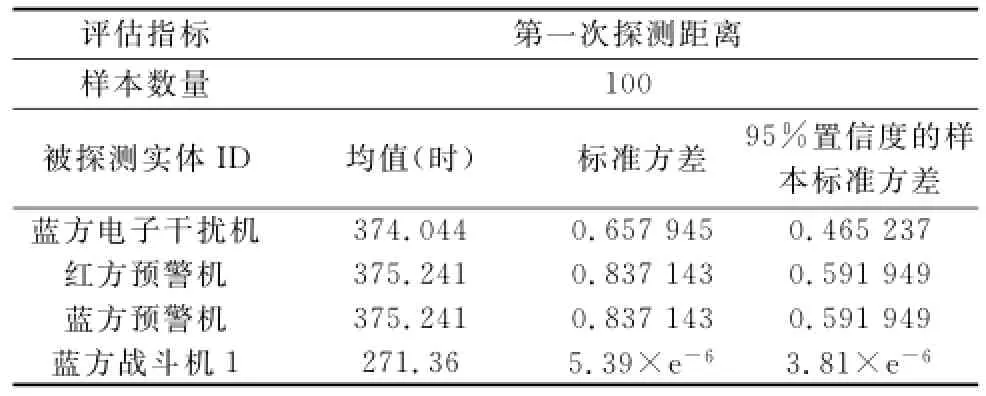
表2 第一次探測距離指標部分輸出
紅方傳感器在想定的第1、2、3、4小時監視探測、分類、辨識的事件數量對比圖如圖6所示。圖6中橫坐標單位為小時,1表示從0~1小時,以此類推。縱坐標單位為個數,藍色柱狀圖表示傳感器監視探測事件數量均值,橙色柱狀圖表示傳感器監視分類事件數量均值,灰色柱狀圖表示傳感器監視辨識事件數量均值。可以看出紅藍雙方在交戰初期(0~1小時)內探測、分類、辨識的事件數量明顯多于其他時間。
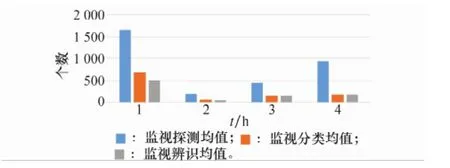
圖6 紅方傳感器監視探測、分類、辨識事件數量
針對想定中的藍方艦船的某一型號對空預警雷達,通過因特網公開資料搜集該雷達的數據。該雷達探測距離為370 km,探測高度為100~50 000 ft,方位角為[0°,360°],俯仰角為[-3°,5°],天線發送增益為35 d B,天線接收增益為35 dB,傳輸功率為37 k W,虛警概率為10-5,傳輸損耗為3.3 d B,脈沖寬度為4μs,信號處理損失為1.9 d B,探測目標雷達截面積為1 m2,在高脈沖重復頻率近距離的情況下實際探測包絡和利用該仿真模型三維剖面包絡對比如圖7所示。
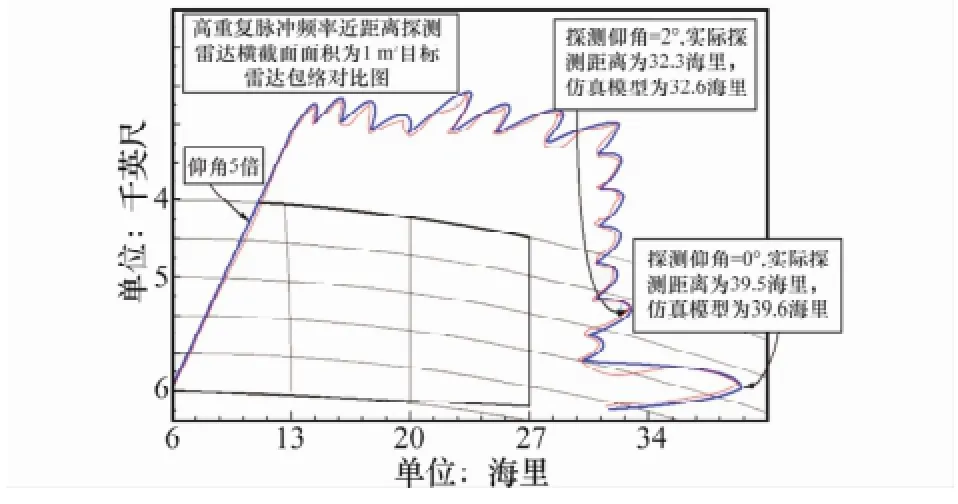
圖7 實際包括和仿真模型探測包括對比圖
圖7 中,紅色探測包絡為實際探測包絡,藍色探測包絡為仿真模型包絡。可以看出,在仰角為2°時,實際探測距離為32.3海里,仿真模型探測距離為32.6海里。在仰角為0°時,實際探測距離為39.5海里,仿真模型探測距離為39.6海里。實際探測包絡和仿真模型包絡的探測距離誤差很小,平均誤差小于0.5海里,可以滿足仿真結果。通過實驗結果,可以看出,通過通用方法可以有效實現傳感器模型對于目標的探測處理,生成目標的物理情報數據和行動情報數據,對于傳感器模型具有可信性、適用性和通用性。
5 結 論
本文從需求上分析了建立傳感器模型探測處理通用方法的必要性,為了解決探測處理的通用性、傳感器開發成本高和計算量大的問題,介紹了傳感器探測通用處理方法流程,對于流程中的每部分的計算進行詳細介紹,結合模型輸入參數和輸出數據結構,并結合作戰仿真驗證想定實驗說明了通用傳感器模型的通用性、適用性,并且降低了模型的計算量,為作戰仿真中情報、監視和偵察領域的模型建模提供了較好的參考方法。
參考文獻:
[1]Law A M.Simulation modeling and analysis[M].New York:The Mc Graw-Hill Companies,2007:5- 8.
[2]Huang K D,Qiu X G.The technology of modeling and simulation[M].Changsha:National University of Defense Technology Press,2010:1- 6.(黃柯棣,邱曉剛.建模與仿真技術[M].長沙:國防科技大學出版社,2010:1- 6.)
[3]Hu X F,Luo P.Themodeling and simulation complex warfare system[M].Beijing:National Defense University Press,2005:9-30.(胡曉峰,羅批.戰爭復雜系統建模與仿真[M].北京:國防大學出版社,2005:9- 30.)
[4]Brehmer B.The dynamic OODA loop:amalgamating boyd’s OODA loop and the cybernetic to command and control[C]∥Proc.of the 10th International Command and Control Research and Technology Symposium,2006:1- 5.
[5]Collins R T,Lipton A J.Algorithms for cooperative multi-sensor surveillance[J].Proceedings of the IEEE,2001,89(10):1456- 1477.
[6]Adamy D L.Introduction to electronic warfare modeling and simulation[M].Boston:SciTech Publishing,2006:56- 70.
[7]Lim E W C.Discrete event simulations-development and applications[M].Rijeka:Intech,2012:63- 73.
[8]Menthe L,Sullivan J.A rand analysis tool for intelligence,surveillance and reconnaissance-the collections operations model[R].USA:Rand Cooperation,2008:1- 36.
[9]Leachtenauer J C,Driggers R G.Surveillanceand reconnaissance imaging systems:modeling and performance prediction[M].Norwood:Artech House,2001:34- 54.
[10]Mao S J,Ju Z Q.C4ISRsystem simulation experiment technology[M].Beijing:Military Science Press,2007:87- 141.(毛少杰,居真奇.C4ISR系統仿真實驗技術[M].北京:軍事科學出版社,2011:87- 141.)
[11]Yang C Z.Electronic countermeasures warfare simulation[M].Beijing:Blue Sky Press,2004:24- 46.(楊承志.電子對抗作戰仿真[M].北京:藍天出版社,2004:24- 46.)
[12]Xu R M.The warfare modeling and simulation[M].Beijing:Military Science Press,2012:220- 240.(許瑞明.作戰建模與仿真[M].北京:軍事科學出版社,2012:220- 240.)
[13]Lei L,Shi X.Surveillance and reconnaissance[M].Beijing:National Defense Industry,2008:12- 20.(雷厲,石星.偵察與監視-作戰空間的千里眼和順風耳[M].北京:國防工業出版社,2008:12- 20.)
[14]Cui Y Q,Wei X,You H,et al.Mobile sensor registration in ECEF coordinates using the MLR algorithm[C]∥Proc.of the IEEE Chinese Institute of Electrics International Conference on Radar,2011:1784- 1787.
[15]Arnold C N,Barnes M J,Berger M,et al.ENU-induced phenovariance in mice:inferences from 587 mutations[J].Bio Med Central Research Notes,2012,5(1):1- 14.
[16]Chen Y G,Li X H.The capability analysis and evaluation of radar network[M].Beijing:National Defense Press,2006:43-76.(陳永光,李修和.組網雷達作戰能力分析與評估[M].北京:國防工業出版社,2006:43- 76.)
[17]Klaus H,Oscar K.Design and analysis of experiments,special designs and applications[M].Hoboken:Wiley,2012:121- 140.
[18]Anghinolfi D,Capogrosso A,Paolucci M,et al.An agentbased simulator for the evaluation of the measurement of effectiveness in the military naval tasks[C]∥Proc.of the 17th IEEE International Conference on System Theory,Control and Computing,2013:733- 738.
General method of sensor model detection processing of warfare modeling and simulation
LI Yuan-feng1,3,LIU Jian-ping2,SHI Cheng-ying1,WANG Wei3
(1.The 103 Department,The Second Artillery Engineering University,Xi’an 710025,China;2.Unit 61683 of the PLA,Beijing 100094,China,3.The 906 Department,The Second Artillery Engineering University,Xi’an 710025,China)
The model of command,control,communication,computer,intelligence,surveillance and reconnaissance(C4ISR)is the soul of warfare simulation system,and it is also the key and difficulty in warfare simulation.On the basis of analyzed the ISR sensor model of warfare modeling and simulation model for detection process modeling requirements,a general method for detecting of sensor model is proposed,and the overall flow of the method is introduced.The calculating process of the nine aspects of the methodology is described in detail.The input and output data binding model structure is described.Combined with the simulation experiments,the applicability and versatility of proposed method to improve the operating efficiency of the model are illustrated.The development costs are saved and a reference model for the ISR modeling and simulation is provided.
warfare simulation;sensor model;detection process;general method
A
10.3969/j.issn.1001-506X.2015.04.13
李元鋒(1982 ),男,工程師,博士研究生,主要研究方向為作戰仿真。E-mail:jonasdhb@163.com
劉建平(1966 ),男,高級工程師,博士,主要研究方向為作戰仿真、系統工程。E-mail:ljp123@163.com
石成英(1964-),男,教授,博士,主要研究方向為系統工程。E-mail:sunyinchao523@163.com
王 偉(1990-),男,碩士研究生,主要研究方向為作戰仿真。E-mail:125886950@qq.com
1001-506X(2015)04-0802-07
2014- 04- 07;
2014- 07- 01;網絡優先出版日期:2014- 10- 22。
網絡優先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141022.1325.005.html
國家自然科學基金(91024030)資助課題
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19