概述整車CAN總線測試
2015-05-30 23:00:01王朝均
決策與信息·中旬刊 2015年10期
[摘要]筆者為重慶力帆乘車有限公司電氣工程師——王朝均,將在本文中闡述CAN總線開發(fā)設計中故障測試、數(shù)據(jù)鏈路層、物理層等內容,為主機廠設計開發(fā)整車CAN通信提供參考依據(jù)。
[關鍵詞]整車;CAN總線;測試
近年來汽車電子技術發(fā)展迅速,CAN總線技術廣泛運用于我國汽車行業(yè)。車輛CAN總線面對電磁環(huán)境相對惡劣,特別是那些具有多功率、大電流、高電壓的車輛,這嚴重的增加了車輛CAN總線設計難度。將來的設計中應當有效評估車輛通信品質進而保證車輛的穩(wěn)定性和安全性。
一、測試工具
測試運用的工具包括:CANoe+CANcaseXL、CANstressDR和數(shù)字示波器。CANoe是ECU和網絡分析、測試、開發(fā)的專用工具,支持需求分析到系統(tǒng)實現(xiàn)的整體系統(tǒng)開發(fā)過程。檢測中CANcaseXL和CANoe硬件配套用于觀察ECU發(fā)送接收、估算總線負載率、記錄總線數(shù)據(jù)功能。
CANstressDR作為獨立運行硬件,能夠與CAN網絡直接串連,將各種干擾邏輯施加在CAN總線上,進而驗證CAN和ECU總線抗干擾能力。測試中CANstressDR的作用在于通過模擬施加故障干擾總線。
數(shù)字示波器作用在于觀察記錄總線電平狀態(tài),并對總線電平進行初步解析。數(shù)字示波器的主要參數(shù)為:1億次/秒采樣速率;分辨率+10ns。
二、測試方法
將車輛CAN網絡系統(tǒng)的集成測試平臺和測試設備串連到一起,只針對車輛CAN網絡系統(tǒng)集成測試平臺各個ECU外部接口進行測試,不改變ECU。根據(jù)圖1
進行測試設備連接。
三、測試內容和評價標準
(一)物理層測試
如圖2進行CAN總線物理連接,將負載電阻R串連在總線梁端,電阻作用在于抑制總線內部信號的反射。不應當在ECU內部設置R,防止內部設置R的ECU同總線連接斷開時,總線失去終端電阻。
當總線所有ECU總線發(fā)送器為關閉狀態(tài),也就是ECU內三極管都介質,總線處于隱性狀態(tài)。在該狀態(tài)所有ECU帶高內阻電壓電源生成總線平均電壓。接受操作可參考圖2顯示的電阻網絡。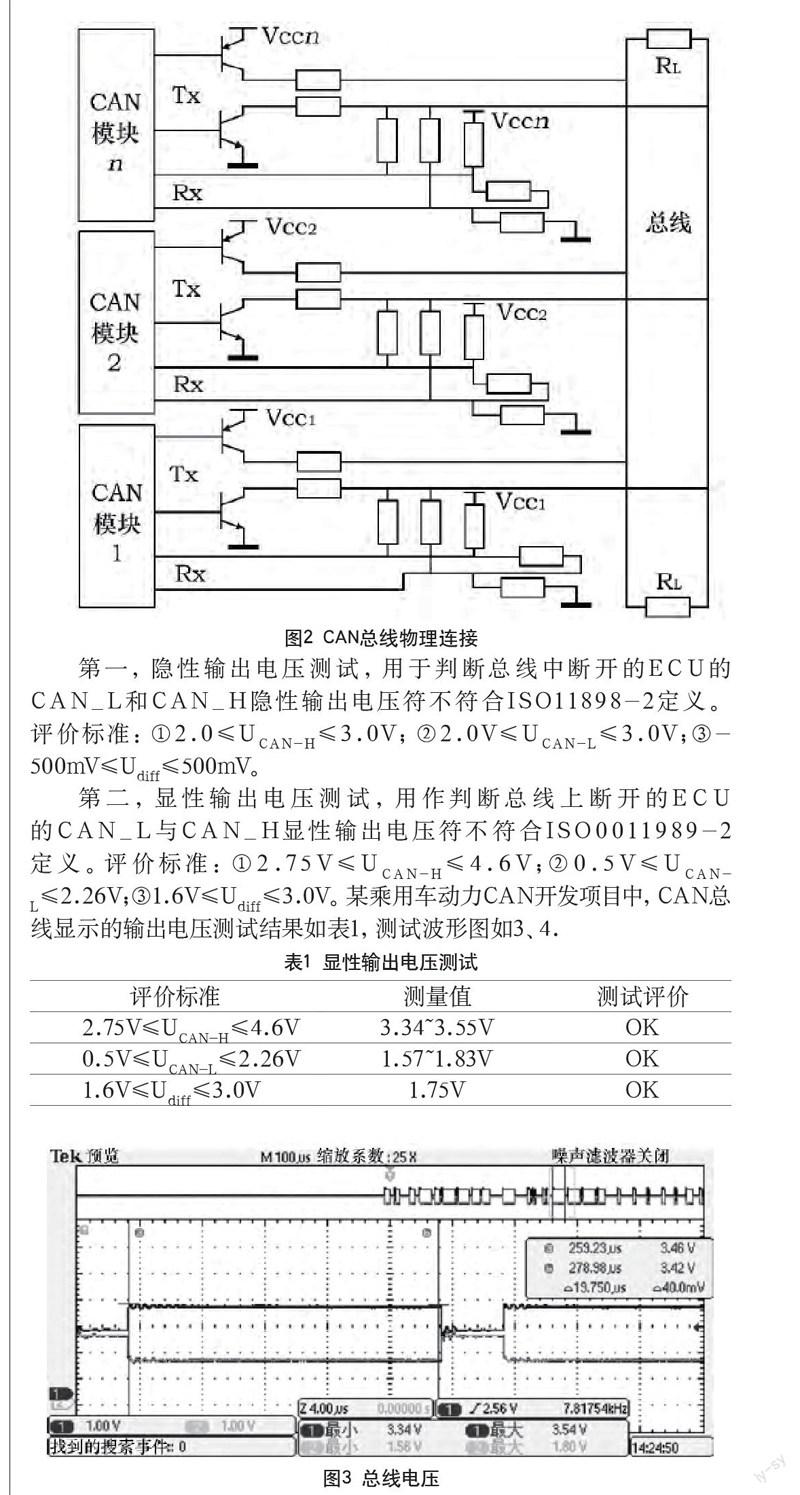
當ECU接通的總線驅動電路大于一個時,也就是成對三極管里接通的對數(shù)大于一個,總線就會產生一個顯性位。這樣終端電阻就會通過電流,這樣總線兩根線間就會產生差動電壓。總線上的差動電壓能夠通過電阻網絡轉換成接收電路的比較器輸入處相應的顯性或隱性電平,進而檢測出隱性和顯性狀態(tài)[1]。
第一,隱性輸出電壓測試,用于判斷總線中斷開的ECU的CAN_L和CAN_H隱性輸出電壓符不符合ISO11898-2定義。評價標準:①2.0≤UCAN-H≤3.0V;②2.0V≤UCAN-L≤3.0V;③-500mV≤Udiff≤500mV。
第二,顯性輸出電壓測試,用作判斷總線上斷開的ECU的CAN_L與CAN_H顯性輸出電壓符不符合ISO0011989-2定義。評價標準:①2.75V≤UCAN-H≤4.6V;②0.5V≤UCAN-L≤2.26V;③1.6V≤Udiff≤3.0V。某乘用車動力CAN開發(fā)項目中,CAN總線顯示的輸出電壓測試結果如表1,測試波形圖如3、4.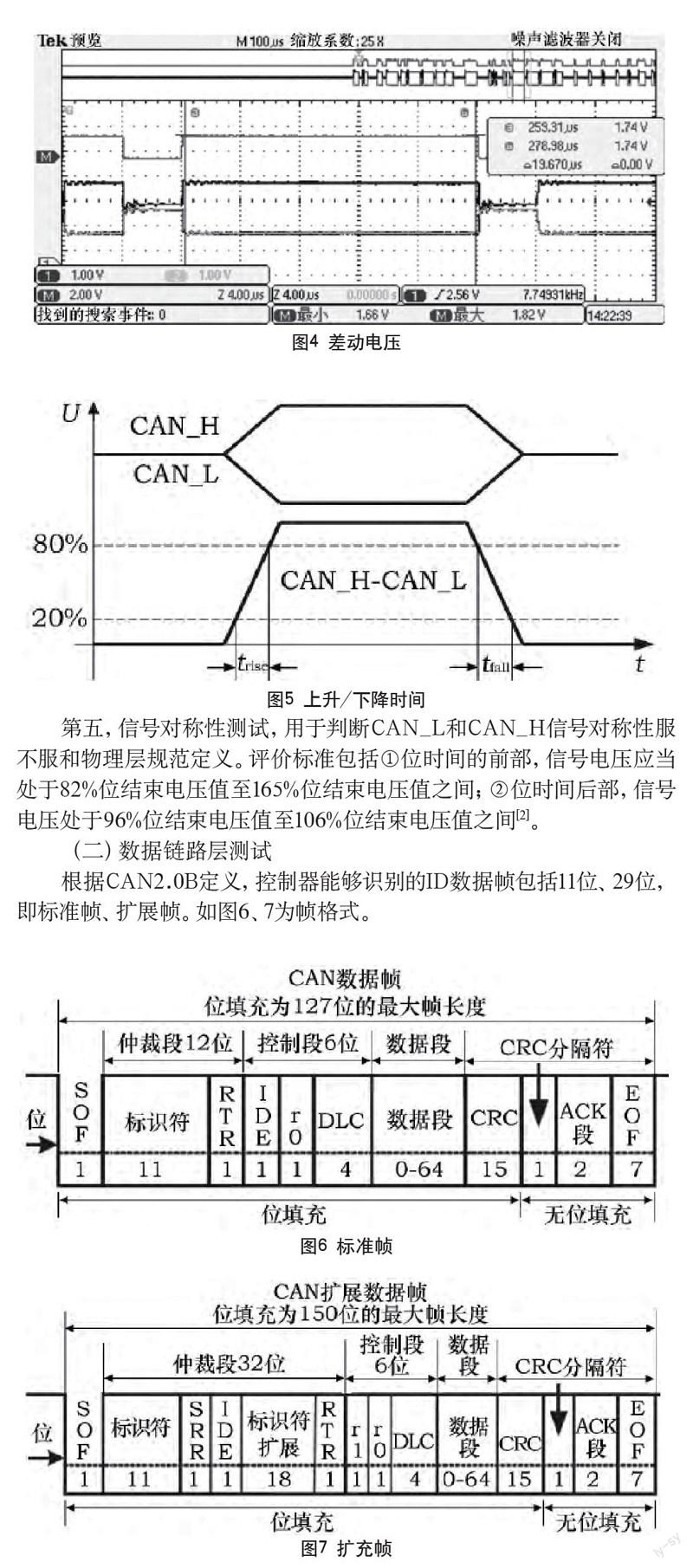
第三,位下降/上升時間測試,用于判斷ECU發(fā)送CAN總線信號的顯性轉隱性和隱性轉顯性的時間,判斷位下降/上升時間符不符合測試規(guī)范要求。圖5為位下降/上升的時間。評價標準:①20ns≤trise≤200ns;②20nstfall≤400ns。
第四,位時間精度測試,用于判斷ECU發(fā)送CAN報文時間的精確度符不符合物理層規(guī)范定義。評價標準:位時間精確度為±0.5%。
第五,信號對稱性測試,用于判斷CAN_L和CAN_H信號對稱性服不服和物理層規(guī)范定義。評價標準包括①位時間的前部,信號電壓應當處于82%位結束電壓值至165%位結束電壓值之間;②位時間后部,信號電壓處于96%位結束電壓值至106%位結束電壓值之間[2]。
(二)數(shù)據(jù)鏈路層測試
根據(jù)CAN2.0B定義,控制器能夠識別的ID數(shù)據(jù)幀包括11位、29位,即標準幀、擴展幀。如圖6、7為幀格式。
第一,擴展報文幀和標準報文幀兼容性測試,用于判斷ECU能夠兼容11位ID標準幀的CAN報文、29位ID擴展幀的CAN報文。評價標準:測試中ECU能夠兼容29位ID擴展幀和11位ID標準幀,不可發(fā)送任何錯誤幀。
第二,100%總線負載下報文接受能力的測試,用于判斷CAN總線負載率為100%時,ECU能夠處理接受到的CAN總線信息,并在CAN總線負載率達到正常水平后恢復。評價標準:①在運用低優(yōu)先級ID增加總線負載率的檢測過程中,ECU應當處理接收到的所有CAN總線信息,同時連續(xù)發(fā)送總線信息;②在運用高優(yōu)先級ID增加總線負載率至100%時,ECU可以出現(xiàn)CAN總線報文的發(fā)送失敗情況,總線負載率重回正常水平后,ECU恢復CAN總線報文發(fā)送;③在全部測試過程中,ECU不應發(fā)送任何錯誤幀。
(三)網絡錯誤處理測試
第一,單個節(jié)點脫開測試,用于檢測單個節(jié)點斷開后ECU中CAN總線通信狀態(tài),并檢測修復該故障后ECU能夠正常進行CAN總線通信。評價標準:①單個節(jié)點斷開后,該節(jié)點ECU可以不具有CAN總線報文接收和發(fā)送功能,不可引起該節(jié)點ECU出現(xiàn)任何形式損壞。其余節(jié)點應當可以繼續(xù)數(shù)據(jù)通信;②恢復斷開的節(jié)點后,該節(jié)點ECU應重新實現(xiàn)CAN總線報文的接收和發(fā)送功能。
第二,接地或節(jié)點電源斷開測試,用于檢測某節(jié)點同電源脫開后或同搭鐵脫開后ECU的CAN總線通信狀態(tài),進而檢測該故障修復后ECU弄否重新實現(xiàn)CAN總線通信。評價標準:①節(jié)點與電源脫開或者在低電壓狀態(tài)時,CAN總線網絡不能被拉低,剩余節(jié)點能夠繼續(xù)數(shù)據(jù)通信,故障節(jié)點ECU可以不具備CAN總線報文接受和發(fā)送功能;②節(jié)點與搭鐵點脫開,CAN總線網絡不能被拉高,剩余節(jié)點可以繼續(xù)數(shù)據(jù)通信,故障節(jié)點ECU可以不具有CAN總線報文接受和發(fā)送的功能;③故障節(jié)點故障恢復后,該節(jié)點ECU應重新實現(xiàn)CAN總線報文接受和發(fā)送功能。
第三,CAN_H斷路測試或CAN_L斷路測試,CAN_H斷路測試用于檢測CAN_H斷路時ECU中CAN總線的通信狀態(tài),并檢測修復該故障后ECU中CAN總線的通信狀態(tài)。評價標準:①CAN_H斷路時,在不同于斷開點一側節(jié)點間,數(shù)據(jù)通信無法進行。在CAN_H斷開點的同側節(jié)點間,能以實現(xiàn)數(shù)據(jù)通信;②修復CAN_H斷路故障后,節(jié)點ECU能夠重新實現(xiàn)數(shù)據(jù)通信。CAN_L斷路測試用于檢測CAN_L斷路后ECU中CAN總線的通信狀態(tài),并檢測修復該故障后ECU的CAN總線通信狀態(tài)。評價標準:①CAN_L斷路后,在不同于CAN_L斷開點的一側的節(jié)點間,數(shù)據(jù)通信無法實現(xiàn)。在CAN_L斷開點的同一側節(jié)點間能夠恢復數(shù)據(jù)通信;②修復CAN_L斷路故障后,各節(jié)點ECU能夠實現(xiàn)數(shù)據(jù)通信。
第四,CAN_L和CAN_H同時斷路檢測,用于測試CAN_L和CAN_H同時斷路時ECU中CAN總線通信情況,并檢測修復該故障后各ECU種CAN總線的通信狀態(tài)。評價標準:①CAN_L和CAN_H于同一位置斷開,在不同于斷開點的一側節(jié)點間,數(shù)據(jù)通信無法實現(xiàn)。在和斷開點同側的節(jié)點間,能夠恢復數(shù)據(jù)通信;②修復CAN_L和CAN_H同時故障后,ECU能夠重新進行數(shù)據(jù)通信。
第五,CAN_H與電源短路測試或CAN_L與電源短路測試。CAN_H評價標準:①電源電壓不小于總線正常電壓,ECU可以不具有CAN總線報文的接收和發(fā)送功能。②修復CAN_H與電源斷路故障后,各節(jié)點可以恢復CAN總線報文的接收和發(fā)送功能。CAN_L評價標準:①短路后,ECU可不具有總線報文接收和發(fā)送功能,不可以任何形式損壞ECU.②修復故障后,各節(jié)點能夠實現(xiàn)總線報文的接收和發(fā)送功能。
第六CAN_L與搭鐵短路測試和CAN_H與搭鐵短路測試。CAN_L評價標準:短路后,總線電壓沒有超過正常范圍,總線可以進行數(shù)據(jù)通信。CAN_H評價標準:①短路后,不要求ECU具有總線報文接收和發(fā)送的功能,不可損壞ECU.②修復故障后,各節(jié)點能夠重新實現(xiàn)總線報文接收和發(fā)送的功能。
第七,CAN_H對CAN_L短路測試。①短路后,ECU不需要具有總線報文接收和發(fā)送功能,不能損壞ECU.②修復故障后,各節(jié)點能夠再次進行總線報文的接收和發(fā)送功能。
結語
本文詳盡的分析了CAN總線開發(fā)設計中故障測試、數(shù)據(jù)鏈路層、物理層等內容,希望本文測試結果能夠為主機廠設計開發(fā)整車CAN通信提供參考依據(jù)。
參考文獻
[1]王歡,杜全輝,尹華軍.純電動轎車CAN總線系統(tǒng)開發(fā)[J].汽車工程學報,2011,(05):147-152.
[2]田園,朱茂桃,蓋福祥.CAN總線故障注入的仿真研究[J].機械設計與制造,2014,(05):202-204+207.
