星敏感器輔助的臨近空間飛行器姿態(tài)匹配傳遞對準方法
2015-05-23 03:53:12程向紅陳紅梅戴晨曦
中國慣性技術(shù)學報 2015年3期
關(guān)鍵詞:模型
程向紅,韓 旭,陳紅梅,戴晨曦
(1. 微慣性儀表與先進導航技術(shù)教育部重點實驗室,南京 210096;2. 東南大學 儀器科學與工程學院,南京 210096)
星敏感器輔助的臨近空間飛行器姿態(tài)匹配傳遞對準方法
程向紅1,2,韓 旭1,2,陳紅梅1,2,戴晨曦1,2
(1. 微慣性儀表與先進導航技術(shù)教育部重點實驗室,南京 210096;2. 東南大學 儀器科學與工程學院,南京 210096)
為解決臨近空間飛行器的精確、快速傳遞對準問題,提出了發(fā)射點慣性坐標系下基于星敏感器信息輔助的傳遞對準方案。根據(jù)星敏感器輸出的不同形式的姿態(tài)信息,如利用TRIAD算法獲得的姿態(tài)角信息或利用QUEST算法獲得的姿態(tài)四元數(shù)信息,分別建立了基于平臺失準角和基于加性四元數(shù)的非線性傳遞對準模型。針對非線性特性模型,采用UKF濾波算法進行了數(shù)學仿真。仿真結(jié)果表明,在2 s內(nèi),兩種方案的姿態(tài)角誤差均可以收斂到20"。仿真驗證了兩種算法的有效性,為臨近空間飛行器的傳遞對準提供了參考。
臨近空間飛行器;SINS/CNS;傳遞對準;加性四元數(shù)
臨近空間(Near space)是指距地面20~100 km的空域。臨近空間飛行器是指在近空間作長期或持續(xù)飛行的飛行器、亞軌道飛行器或在臨近空間飛行的高超聲速巡航飛行器。由于其重要的開發(fā)應用價值在國際上引起廣泛關(guān)注, 成為當今世界軍事強國關(guān)注的戰(zhàn)略發(fā)展方向[1]。臨近空間飛行器的武器系統(tǒng)(子慣導系統(tǒng))需要采用傳遞對準的方法利用主慣導系統(tǒng)獲得精確的導航信息。傳遞對準的速度和精度決定了臨近空間飛行器武器系統(tǒng)的作戰(zhàn)響應速度和打擊命中精度。
近幾年,有不少學者提出利用外部信息輔助傳遞對準。馬閃[2]提出在空間機動平臺完成粗對準后,利用彈載星敏感器引入的位置和姿態(tài)角信息,建立“位置+姿態(tài)角”匹配的對準方法,實現(xiàn)了對天基導彈的精對準。臨近空間空氣較為稀薄,大氣散射的太陽輻射較小,星敏感器的可探測星等增大,對星敏感器的利用有利,可采用星敏感器的高精度姿態(tài)信息輔助空間飛行器完成傳遞對準[3]。根據(jù)不同的姿態(tài)確定算法,星敏感器可以輸出姿態(tài)角信息或者姿態(tài)四元數(shù)信息,在傳遞對準的模型建立方面,可建立兩類誤差方程及對應的量測方程,一類是平臺失準角方程,另一類是四元數(shù)誤差方程。在平臺失準角建立的傳遞對準模型方面已有大量研究,印度Chaudhuri等學者建立了NWV(North West Vertical)坐標系下空間機動平臺的傳遞對準模型[4];不同飛行器需要在不同的坐標系下建立模型,陳凱提出了慣性坐標系下空間平臺失準角的傳遞對準方案,指出采用當?shù)厮阶鴺讼禃矶嘤嗟淖鴺宿D(zhuǎn)換,給實際應用帶來不便[5];謝波等提出了采用地球系的行進間動基座間接精對準算法,其穩(wěn)定性和快速性優(yōu)于地理系的精對準算法[6]。此外,宮曉琳、房建成等人提出將預測濾波方法應用于空間機動平臺的傳遞對準系統(tǒng)中,將慣性器件誤差在線估計并修正,提高了對準的速度和精度[7]。
以四元數(shù)誤差方程建立的傳遞對準模型也有一些研究成果,四元數(shù)誤差包括乘性四元數(shù)誤差和加性四元數(shù)誤差。乘性四元數(shù)誤差仍然保持旋轉(zhuǎn)的關(guān)系,受四元數(shù)規(guī)范化的約束,對乘性四元數(shù)傳遞對準的研究主要集中在對濾波算法的研究[8-9];而加性四元數(shù)誤差是兩個四元數(shù)的相應元素的代數(shù)差,不受四元數(shù)規(guī)范化約束。目前大多數(shù)文獻只是在量測方程中引入四元數(shù)信息,而從系統(tǒng)方程到量測方程的建立均引入四元數(shù)信息的文獻還比較少,文獻[10][11]推導了基于加性四元數(shù)的速度匹配量測模型,但并未對姿態(tài)匹配作為量測方程的傳遞對準方案進行研究。
本文提出了以發(fā)射點慣性坐標系為導航系的星敏感器輔助的臨近空間飛行器傳遞對準方案,利用星敏感器的高精度姿態(tài)信息修正子慣導的誤差。根據(jù)星敏感器輸出的不同形式的姿態(tài)信息,分別建立了基于平臺失準角和基于加性四元數(shù)的非線性傳遞對準模型。針對兩種非線性模型,采用UKF濾波算法進行數(shù)學仿真。仿真結(jié)果表明,兩種算法的子慣導姿態(tài)角誤差均可以在2 s內(nèi)收斂,且收斂精度相當。
1 坐標系以及四元數(shù)定義
發(fā)射點慣性坐標系i:原點為發(fā)射點O,OXi軸指向發(fā)射方向,OYi軸指向天向,由右手定則決定OZi軸方向,發(fā)射后固化在慣性空間中。
機體坐標系bm:原點為機體質(zhì)心,OXbm軸為機體縱軸對稱軸,指向機體頭部,OYbm軸在機體縱向?qū)ΨQ面內(nèi),并垂直于縱軸OXbm向上,OZbm按右手定則確定。
彈體坐標系bs:原點為彈體質(zhì)心,OXbs軸為彈體縱軸對稱軸,指向彈體頭部,OYbs軸在彈體縱向?qū)ΨQ面內(nèi),并垂直于縱軸OXbs向上,OZbs按右手定則確定。
因諸多文獻中對四元數(shù)的角標定義不一,使得四元數(shù)的運算具有不同表達形式,所以本文作上述約定,
2 星敏感器輔助的傳遞對準方法
慣導系統(tǒng)與星敏感器的組合工作模式有全平臺模式、慣導平臺與星敏感器捷聯(lián)模式以及全捷聯(lián)模式。全捷聯(lián)模式是最靈活且最具有發(fā)展前景的工作模式。全捷聯(lián)模式對陀螺儀、加速度計的精度以及星敏感器的動態(tài)性能要求較高,但是各種新型陀螺儀、加速度計以及CMOS APS星敏感器的出現(xiàn),使這一問題能夠得以解決[12]。因此,本文采用全捷聯(lián)工作模式,設星敏感器與飛行器固連,星敏感器坐標系與機體坐標系重合,不考慮星敏感器的安裝誤差角,星敏感器輸出的姿態(tài)信息即為主慣導的姿態(tài)信息。
星敏感器通過探測天球上恒星星圖來確定星敏感器相對于慣性坐標系的姿態(tài)。通過不同的姿態(tài)確定算法,如TRIAD算法和QUEST算法,可獲得姿態(tài)角或姿態(tài)四元數(shù)信息。根據(jù)不同形式的姿態(tài)信息,選擇不同的姿態(tài)匹配方式,在發(fā)射點慣性坐標系下分別建立基于平臺失準角和基于加性四元數(shù)的傳遞對準模型。
2.1 基于平臺失準角的傳遞對準模型
選取子慣導的三個數(shù)學平臺失準角(φx, φy, φz)、子慣導陀螺的常值漂移(εx, εy, εz)、三個撓曲變形角(λx, λy, λz)以及三個撓曲變形角速度(ωx, ωy, ωz)建立傳遞對準狀態(tài)如下:

對應的狀態(tài)方程分別為:① 數(shù)學平臺失準角方程為

② 撓曲變形角模型
撓曲變形主要受陣風擾動、發(fā)動機噪聲以及溫度場變化等因素的影響,可以視為由隨機擾動干擾的隨機變量,即白噪聲激勵的馬爾科夫過程。設撓曲變形引起的撓性失準角為λ,則二階馬爾科夫過程如下:
式中:λ = [λxλyλz]T的標準差為σ = [σxσyσz]T;η = [ηxηyηz]T為白噪聲,方差為Sη=[SηxSηySηz]T,即η~N(0,Sη);β=[βxβyβz]T為常數(shù)。Sη、σ和β之間有如下關(guān)系:

每個隨機過程的相關(guān)時間τi與相應的β有如下關(guān)系:βi=2.146τi(i=x,y,z),τi為相關(guān)時間。
狀態(tài)方程如下:

③ 量測方程

式中,(φm×)是主慣導的失準角構(gòu)成反對稱陣,可視為白噪聲。假設主子慣導之間存在誤差角θ=[θ1θ2θ3]T= λ+η,其中,λ為撓曲變形角,η為白噪聲,則
式(7)可進一步表示為
結(jié)合姿態(tài)矩陣與歐拉角關(guān)系,可得姿態(tài)匹配量測方程:
2.2基于加性四元數(shù)的傳遞對準模型
選取子慣導的姿態(tài)四元數(shù)誤差δQ=(δq0, δq1, δq2, δq3)、子慣導陀螺的常值漂移(εx, εy, εz)、三個撓曲變形角(λx, λy, λz)以及三個撓曲變形角速度(ωx, ωy, ωz)建立傳遞對準狀態(tài)如下:

① 四元數(shù)誤差方程:
由四元數(shù)微分方程可知:其中,



對式(14)兩邊求導,并把式(15)(16)代入得
狀態(tài)方程如下:

② 量測方程

星敏感器提供的主慣導姿態(tài)信息相對于子慣導姿態(tài)而言是精確的,所以=,由于四元數(shù)的規(guī)范化,


所以,
3 仿真與分析
設飛行器初始經(jīng)緯度為東經(jīng)116.346°,北緯39.984°,仿真過程為飛行器巡航階段。對準初始時刻,飛行器的速度為3 Ma,高度為50 km,由于高超環(huán)境,飛行器產(chǎn)生高頻振動,設飛行器在縱搖、航向以及橫滾方向的振動頻率分別為100 Hz、80 Hz、60 Hz,幅值均為1.2′。子慣導初始縱搖角、航向角和橫滾角誤差分別為50°、40°和30°。陀螺儀x、y、z方向常值漂移均為0.05 (°)/h,隨機噪聲為0.005 (°)/√h。加速度計在x、y、z方向常值偏置均為0.1 mg,隨機噪聲為0.01 mg。撓曲變形角二階馬爾科夫過程x、y、z方向的時間常數(shù)均為0.5 s,撓曲變形角的標準差均為3'。星敏感器輸出的姿態(tài)精度為3″。SINS的數(shù)據(jù)更新頻率為500 Hz,UKF濾波周期為0.1 s,仿真時間20 s。圖1為兩種傳遞對準算法前10 s的姿態(tài)誤差圖。
由圖1可以看出,兩種傳遞對準算法均可以使姿態(tài)角誤差在2 s內(nèi)收斂。為了比較兩種傳遞對準模型的姿態(tài)角誤差收斂精度,給出兩種算法在2~5 s時間內(nèi)的姿態(tài)角誤差均值和標準差,如表1所示。從表1中可以看出,兩種算法的姿態(tài)誤差角收斂精度相當,三個姿態(tài)角誤差均可以收斂到20″以內(nèi)。
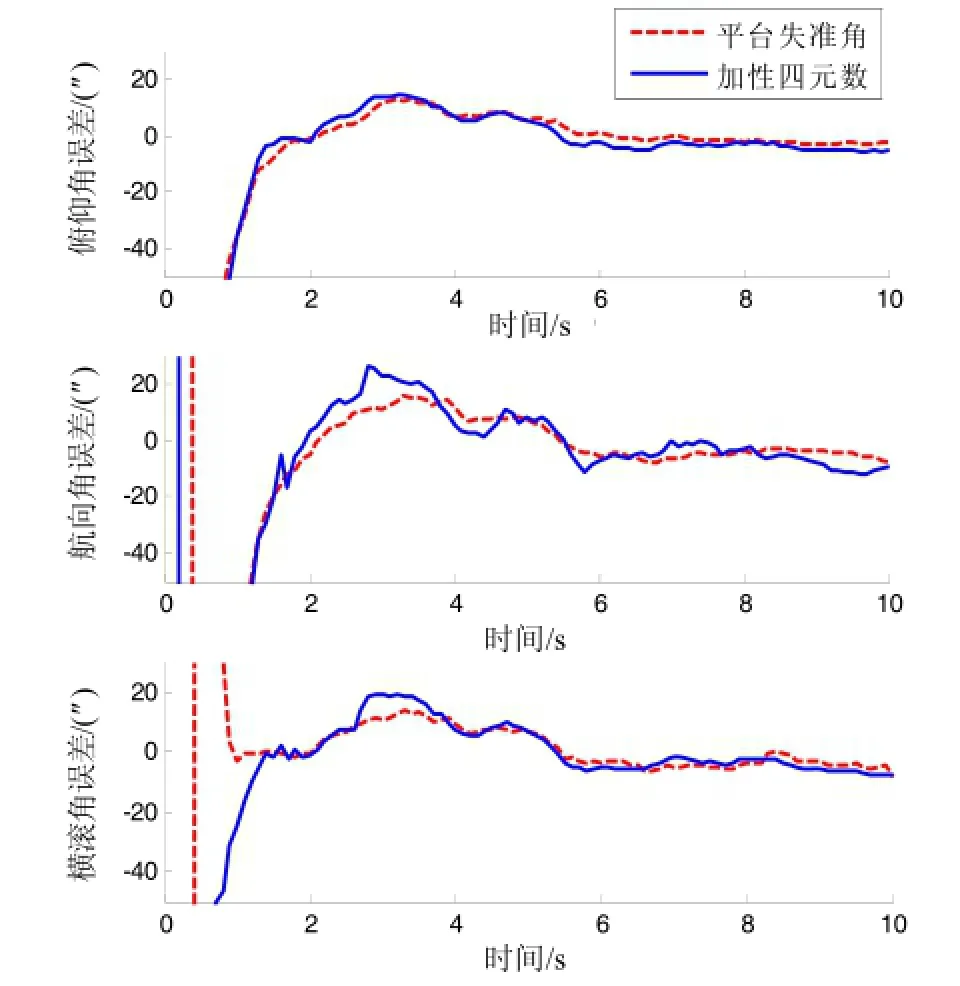
圖1 兩種傳遞對準模型的姿態(tài)誤差Fig.1 Attitude errors of two transfer alignment models
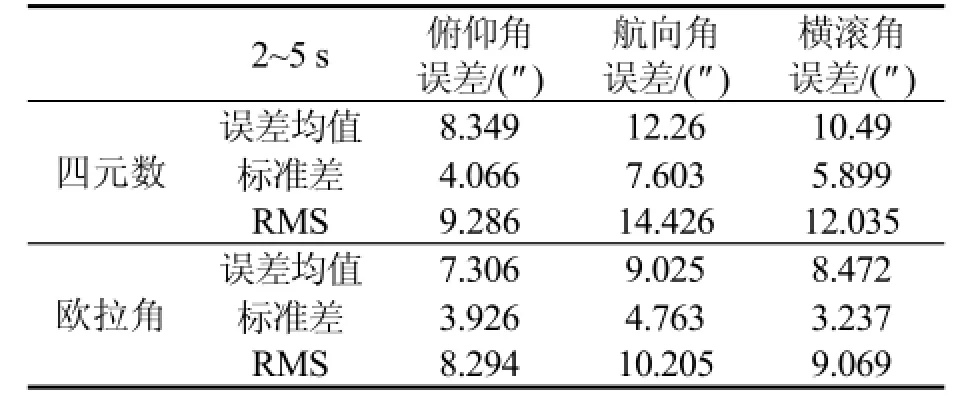
表1 兩種方法的姿態(tài)誤差估計Tab.1 Attitude errors of two transfer alignment models
4 結(jié) 論
針對臨近空間飛行器的特點,提出發(fā)射點慣性坐標系下的傳遞對準模型,利用星敏感器的高精度姿態(tài)信息修正子慣導的誤差。分別建立了基于平臺失準角和基于加性四元數(shù)的非線性傳遞對準模型。針對兩種非線性模型,采用UKF濾波算法進行了數(shù)學仿真。仿真結(jié)果表明,2 s內(nèi),兩種方案的姿態(tài)角誤差均可以收斂到20″。仿真驗證了兩種算法的有效性,為臨近空間飛行器的傳遞對準提供了參考。
(References):
[1] Chen Hong-mei, Cheng Xiang-hong, Dai Chen-xi. Accuracy efficiency and stability analysis of sparse-grid quadrature Kalman filter in near space hypersonic vehicles[C]//2014 Position, Location and Navigation Symposium. 2014: 27-36.
[2] 馬閃, 王新龍. 天基導彈的動基座快速精確傳遞對準方法[J]. 紅外與激光工程, 2007, 36: 503-507.
Ma Shan, Wang Xin-long. Rapid precise transfer alignment of space based missile on moving base[J]. Infrared and Laser Engineering, 2007, 36: 503-507.
[3] Lai Ji-zhou, Yong Jun, Xiong Zhi, et al. SINS/CNS tightly integrated navigation positioning algorithm with nonlinear filter[J]. Control and Decision, 2012, 27(11): 1649-1652.
[4] Chaudhuri S K, Nandi P K. Transfer alignment for space vehicles launched from a moving base[J]. Defense Science Journal, 2005, 55(3): 245-252.
[5] Chen K, Zhao G, Meng Z, et al. Transfer alignment for experiment's INS on space moving platform[C]//4th IEEE Conference on Industrial Electronics and Applications. 2009: 1823-1827.
[6] 謝波, 江一夫, 嚴恭敏, 陳勇. 捷聯(lián)慣導基于地球系的動基座間接精對準算法[J]. 中國慣性技術(shù)學報, 2014, 22(5): 593-596.
Xie-Bo, Jiang Yi-Fu, Yan Gong-Min, Chen Yong. Indirect fine-alignment algorithm of in-motion SINS based on ECEF-frame[J]. Journal of Chinese Inertial Technology, 2014, 22(5): 593-596.
[7] 宮曉琳, 房建成, 郭雷. SINS快速精確傳遞對準技術(shù)研究[J]. 宇航學報, 2008, 29(4): 1228-1232.
Gong Xiao-lin, Fang Jian-cheng, Guo Lei. Study on the rapid and accurate transfer alignment for SINS[J]. Journal of Astronautics, 2008, 29(4): 1228-1232.
[8] Wang Ya-feng, Sun Fu-chun, Liu Hua-ping, Min Hai-bo. Central difference particle filter applied to transfer alignment for SINS on missiles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 375-386.
[9] JIANG Yi-fu, XIE Bo, WEN Jun. SINS in-motion alignment and position determination for land-vehicle based on quaternion Kalman filter[C]//Proceedings of the 32nd Chinese Control Conference. Xi’an, 2013: 5083-5088.
[10] MU Yu-tao, FANG Hai-tao. One alignment method for SINS in vehicular environment[C]//Proceedings of the 30th Chinese Control Conference. 2011: 1570-1575.
[11] 張濤, 徐曉蘇. 基于簡化無跡Kalman濾波的非線性SINS初始對準[J]. 中國慣性技術(shù)學報, 2011, 19(5): 537-542.
Zhang Tao, Xu Xiao-su. Nonlinear initial alignment of INS based on simplified UKF[J]. Journal of Chinese Inertial Technology, 2011, 19(5): 537-542.
Transfer alignment approach to near space vehicles based on star sensors
CHENG Xiang-hong1,2, HAN Xu1,2, CHEN Hong-mei1,2, DAI Chen-xi1,2
(1. Key Laboratory of Micro-inertial Instrument and Advanced Navigation Technology of Ministry of Education, Nanjing 210096, China; 2. School of Instrument Science & Engineering, Southeast University, Nanjing 210096, China)
A transfer alignment method based on star sensors in the launch-point inertial coordinate system is proposed aiming at solving the problem of rapid response and precise transfer alignment of near space vehicles. The nonlinear transfer alignment models based on misalignment angle and additive quaternion are established according to the different forms of attitude information from star sensors, such as the attitude angle by TRIAD algorithm or the attitude quaternion by QUEST algorithm. Mathematical simulation is conducted by applying UKF to deal with the nonlinear feature of the transfer alignment model, and the results show that three attitude angles of the two transfer alignment algorithms can all converge to 20" within 2 s. The simulation verifies the effectiveness of the two algorithms and provides a reference for the transfer alignment of near space vehicles.
near space vehicles; SINS/CNS; transfer alignment; additive quaternion
U666.1
A
1005-6734(2015)03-0311-04
10.13695/j.cnki.12-1222/o3.2015.03.006
2015-02-04;
2015-05-26
中國航天科技集團公司衛(wèi)星應用研究院創(chuàng)新基金資助(2014_CXJJ_DH_08);總裝預研項目(513090604)
程向紅(1963—),女,教授,博士生導師,從事慣性技術(shù)及其應用研究。E-mail:xhcheng@seu.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
