AFM壓電陶瓷驅(qū)動器類Hammerstein建模與參數(shù)辨識*
2015-05-09 05:56:53徐運揚徐康康
傳感技術(shù)學報 2015年1期
關(guān)鍵詞:模型
徐運揚,徐康康,沈 平
(中南大學高性能復雜制造國家重點實驗室,長沙 410012)
?
AFM壓電陶瓷驅(qū)動器類Hammerstein建模與參數(shù)辨識*
徐運揚,徐康康,沈 平*
(中南大學高性能復雜制造國家重點實驗室,長沙 410012)
AFM(Atomic Force Microscope,原子力顯微鏡)中的壓電陶瓷驅(qū)動器具有率相關(guān)遲滯非線性特性,這會影響AFM的掃描和定位精度。針對傳統(tǒng)靜態(tài)遲滯模型不能反映系統(tǒng)率相關(guān)動態(tài)遲滯特性的缺陷,提出Hammerstein模型以描述壓電陶瓷驅(qū)動器的靜態(tài)和動態(tài)遲滯特性。利用最小二乘支持向量機結(jié)合奇異值分解法對模型中的參數(shù)進行辨識。實驗結(jié)果表明,模型能體現(xiàn)壓電陶瓷驅(qū)動器的率相關(guān)遲滯特性,精度高于傳統(tǒng)靜態(tài)遲滯模型,建模方法對此類系統(tǒng)具有較好的應(yīng)用價值。
壓電陶瓷驅(qū)動器;非線性建模;Hammerstein模型;系統(tǒng)辨識;支持向量機
AFM中的壓電陶瓷驅(qū)動器是掃描和成像系統(tǒng)中的關(guān)鍵部件[1],其響應(yīng)速度快,具有納米級的定位精度。但同時其輸入輸出表現(xiàn)為非光滑、多值映射的遲滯回環(huán)特性,即同一個輸入電壓值可能對應(yīng)多個輸出位移[2],若不對遲滯進行補償,則會影響AFM掃描和定位精度,導致成像的畸變。因此,研究這種非線性關(guān)系并建立其準確的模型,并對遲滯加以補償,對提高壓電陶瓷驅(qū)動器的運動控制精度具有重要的意義。
對壓電陶瓷驅(qū)動器的遲滯建模,國內(nèi)外學者做了大量的工作。如基于Preisach模型的建模方法[3],雖然能較好地描述壓電陶瓷驅(qū)動器的遲滯非線性特性,但模型結(jié)構(gòu)復雜,建模過程需要大量特定的實驗,實際應(yīng)用不便。另外還有PI(Prandtl-Ishlinskii)模型[4],雖也能描述遲滯非線性,但由于其算子關(guān)于原點奇對稱而實際遲滯曲線大都是非對稱的,這會引入建模誤差,影響模型精度。其他的智能建模法,如神經(jīng)網(wǎng)絡(luò)[5],受限于算法本身,存在局部極小值點,容易陷入過訓練,且網(wǎng)絡(luò)結(jié)構(gòu)、類型的選擇過分依賴于經(jīng)驗,這都會影響模型的預(yù)測效果。以上模型均屬于靜態(tài)模型,實際上壓電陶瓷驅(qū)動器的驅(qū)動電壓和輸出位移間還存在率相關(guān)遲滯非線性特性[6],即遲滯的程度同輸入電壓的頻率有關(guān)。這說明壓電陶瓷驅(qū)動器的遲滯特性同時包含靜態(tài)非線性和線性動態(tài)特性[7]。因此有必要對模型的形式加以改進,以提高模型的精度。
Hammerstein模型是一類塊結(jié)構(gòu)的非線性動態(tài)模型[8],這類模型由線性動態(tài)模塊和非線性靜態(tài)模塊組成,其已被證明能描述一大類非線性系統(tǒng)[9]。模型簡單,參數(shù)辨識容易。受此啟發(fā),本文提出基于Hammerstein模型的壓電陶瓷驅(qū)動器遲滯模型,這種模型能描述壓電陶瓷驅(qū)動器的靜態(tài)非線性以及動態(tài)特性,并具有較高的預(yù)測精度。
對Hammerstein模型參數(shù)辨識的研究,Krzyzak[10]等使用遞推核回歸法和協(xié)相關(guān)法辨識Hammerstein模型的參數(shù),對模型的線性部分使用協(xié)相關(guān)系數(shù)求解,模型的非線性部分由遞推核回歸法得到。Chen[11]等提出遞推最小二乘法辨識對模型參數(shù)進行辨識。向微[12]等將線性動態(tài)部分和非線性靜態(tài)部分分別用Laguere級數(shù)和非線性基表示,辨識得到兩部分的參數(shù)。Pelckmans和Goethal等[13]把最小二乘支持向量機LS-SVM(Least Squares Support Vector Machine)用于Hammerstein模型參數(shù)的辨識,通過采用冗余參數(shù)法以及增加約束,辨識得到了線性部分和非線性部分的系數(shù)。由于最小二乘支持向量機能很好地表示非線性過程[14],且其參數(shù)具有冗余性,因此,本文采用最小二乘支持向量機算法,通過增加約束條件,結(jié)合奇異值分解,辨識Hammerstein模型中的參數(shù)。實驗結(jié)果表明,率相關(guān)遲滯Hammerstein模型能體現(xiàn)系統(tǒng)輸出與輸入信號頻率間的動態(tài)特性,較傳統(tǒng)靜態(tài)遲滯模型更能體現(xiàn)壓電陶瓷驅(qū)動器的真實特性。
1 問題構(gòu)造
AFM壓電陶瓷驅(qū)動器的輸入輸出特性包含靜態(tài)非線性以及線性動態(tài)特性,可用Hammerstein模型進行描述[7]。靜態(tài)非線性部分體現(xiàn)系統(tǒng)的靜態(tài)遲滯非線性,動態(tài)部分體現(xiàn)系統(tǒng)的率相關(guān)動態(tài)特性。
Hammerstein模型是一類塊結(jié)構(gòu)的非線性動態(tài)模型,它由一個靜態(tài)非線性環(huán)節(jié)和一個動態(tài)線性環(huán)節(jié)串聯(lián)組成。壓電陶瓷驅(qū)動器Hammerstein模型的結(jié)構(gòu)如圖1所示。

圖1 Hammerstein模型結(jié)構(gòu)圖
u(t)代表t時刻的輸入電壓,它經(jīng)過靜態(tài)遲滯非線性模塊f(·)得到中間變量v(t),該變量再經(jīng)過線性動態(tài)模塊G(·),同e(t)疊加后得到t時刻的位移輸出y(t),其中e(t)代表未建模的系統(tǒng)特性和隨機擾動。
對壓電陶瓷驅(qū)動器而言,其某一時刻的輸出與歷史電壓變化以及位移變化情況有關(guān),其輸入輸出關(guān)系能用以下基于Hammerstein結(jié)構(gòu)的方程表達[9]:

(1)
其中u(t)=[u1(t),…,unu(t)]T表示輸入電壓信號,yi(t)表示輸出位移值,m,n表示系統(tǒng)輸入輸出的階數(shù),nu表示輸入電壓信號u(t)的采樣個數(shù)。β=[β1,…,βn]T和Ck=[c1,…,cl,…,cnu]T以及cl=[cl(1),…,cl(m)]T均為系統(tǒng)的回歸參數(shù)。
式(1)中遲滯非線性模塊f[u(t-k)]通常可采用前文提到的靜態(tài)遲滯模型或多項式、樣條線性函數(shù)等描述。但靜態(tài)遲滯模型如Presaich模型存在模型形式復雜,難以求解和不利于在線控制的特點;PI模型算子關(guān)于原點奇對稱而與實際非對稱遲滯曲線不符,存在原理性建模誤差,模型精度有限。神經(jīng)網(wǎng)絡(luò)受限于其算法,容易陷入過學習和局部極小的情況,影響模型的泛化能力。多項式、樣條函數(shù)由于形式相對簡單,對遲滯現(xiàn)象的描述精度有限。因此,尋找合適的模型結(jié)構(gòu)用以描述靜態(tài)遲滯非線性有利于壓電陶瓷驅(qū)動器模型精度的提高。
2 驅(qū)動器率相關(guān)Hammerstein建模
2.1 基于LS-SVM的率相關(guān)Hammerstein模型表示
支持向量機是基于統(tǒng)計學習理論的新型機器學習方法,同其他傳統(tǒng)機器學習方法如神經(jīng)網(wǎng)絡(luò)相比,其關(guān)注結(jié)構(gòu)經(jīng)驗最小化而非經(jīng)驗風險最小化,這使得支持向量機在小樣本學習、強非線性系統(tǒng)等領(lǐng)域比傳統(tǒng)學習方法更具優(yōu)勢[16]。因此可利用支持向量機對壓電陶瓷驅(qū)動器靜態(tài)遲滯非線性部分進行描述。
y[u(t)]=ωTφ[u(t)]+d,ω∈Z,b∈R
(2)
式中的參數(shù)ω,d待求。根據(jù)結(jié)構(gòu)風險最小原理,該回歸問題可轉(zhuǎn)化為一個等式約束問題,其最優(yōu)化目標函數(shù)如下:
(3)
滿足等式約束條件:
yi=ωTφ[u(t)]+d+ei,i=1,2,…,N
(4)
目標函數(shù)(3)的第1項對應(yīng)模型的泛化能力,第2項表示模型的精確性,正的常數(shù)ρ是模型泛化能力和精確性的一個折中參數(shù),可以根據(jù)需要進行調(diào)整,ei是第i個實驗數(shù)據(jù)和預(yù)測輸出間的誤差。
根據(jù)LS-SVM理論,Hammerstein模型中第k時刻的非線性項可表示為:
cl(k)f(ul(t-k))=cl(k)(ωTφ(ul(t-k))+d)
(5)
(6)

該式即為基于LS-SVM的壓電陶瓷驅(qū)動器率相關(guān)遲滯Hammerstein模型。
2.2 基于LS-SVM的Hammerstein模型參數(shù)辨識
式(6)表示的最優(yōu)化問題可以寫成如下形式:
(7)
(8)
式中t=r,…,T,r=max(m,n)+1。
為求解方程(7)在約束條件(8)下的優(yōu)化問題,使用拉格朗日乘子法構(gòu)造拉格朗日函數(shù)如下:
(9)
式中αt,δk是拉格朗日乘子。由拉格朗日函數(shù)的最優(yōu)值條件:
(10)
得到如下線性方程組:

(11)
式中:
Qu(T×T)(τ,t)=φT(u(τ))φ(u(t)),t,τ=1,…,T
待求的參數(shù)αt,δk,βi,c可以通過求解方程組(11)得到,下面通過奇異值分解法求解回歸參數(shù)Ck(k=1,…,m),構(gòu)造式(12):
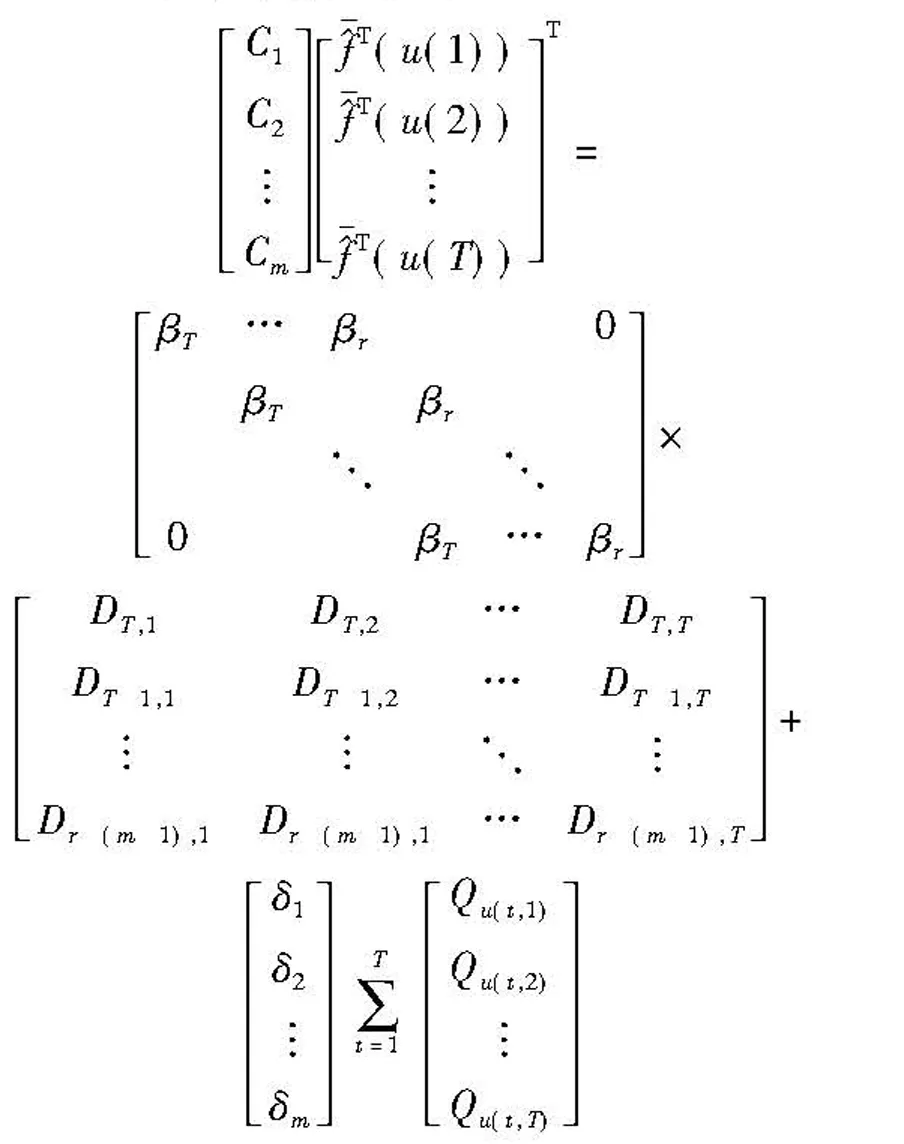
(12)
式(12)右邊為已知項,因此對其進行
奇異值分解即可求得系數(shù)矩陣Ck。至此,式(1)中的參數(shù)β和Ck得以確定。
3 實驗研究
為驗證模型的效果,對壓電陶瓷驅(qū)動器0~100 Hz輸入頻率下的率相關(guān)遲滯特性進行建模。實驗設(shè)備如圖2所示。

圖2 實驗儀器圖
AFM是美國Veeco公司的Dimension Icon,其壓電陶瓷驅(qū)動器X、Y、Z3個軸向上均能承受-220 V~+220 V的電壓。實驗采樣頻率為20 kHz,設(shè)備工作在開環(huán)模式下,取X軸向的壓電陶瓷驅(qū)動器輸入輸出特性進行研究。
實驗結(jié)果表明,輸入信號頻率低于1 Hz時,壓電陶瓷驅(qū)動器的遲滯環(huán)幾乎不發(fā)生變化,因而取1 Hz輸入頻率下驅(qū)動器的輸入輸出數(shù)據(jù)建立靜態(tài)模型,該模型體現(xiàn)壓電陶瓷驅(qū)動器的靜態(tài)遲滯特性。
PI模型[17-18]是Presaich模型的一種子模型,較傳統(tǒng)Presaich模型而言,其結(jié)構(gòu)簡單,運算量更小,該模型輸出不隨輸入頻率的變化而改變,屬于靜態(tài)模型。在輸入信號頻率變化時,將PI模型與率相關(guān)遲滯Hammerstein模型的輸出結(jié)果進行比較,可以直觀地看到率相關(guān)模型對頻率變化的描述效果。
利用頻率范圍0~100 Hz的隨機信號來激勵壓電陶瓷驅(qū)動器,測得其輸出值并歸一化。利用基于最小二乘支持向量機的參數(shù)辨識法辨識得到Hammerstein模型中的參數(shù)。模型輸入輸出階數(shù)調(diào)整方法如下:先將m,n設(shè)為某固定值,然后調(diào)整ρ和σ,使用10折交叉驗證法[19],使得模型在滿足最小訓練誤差的前提下復雜度最小。得到最優(yōu)ρ和σ值后,再在此基礎(chǔ)上調(diào)節(jié)m和n,得到m和n的最優(yōu)值。經(jīng)驗證,最終取Hammerstein模型的階數(shù)m和n分別為3和6,模型正則化參數(shù)ρ=100,σ=0.001。
為評估所建模型的效果,定義相對均方根誤差:
(13)
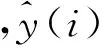
為檢驗?zāi)P偷姆夯芰?分別將10Hz、50Hz、100Hz單一頻率正弦激勵下率相關(guān)Hammerstein遲滯模型預(yù)測輸出與實測輸出進行對比,正弦信號的幅值范圍均為0~140V。
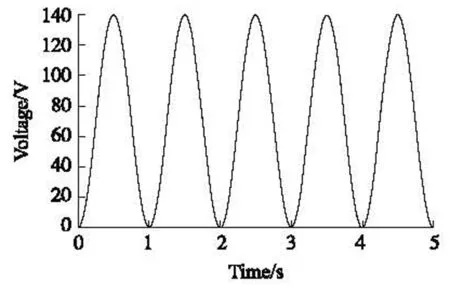
圖3 輸入正弦信號
圖4 Hammerstein模型檢驗
對比結(jié)果如圖4,10Hz輸入信號下Hammerstein模型的RRMSE為0.012 4,而PI模型達到了0.279 7。50Hz輸入信號下,Hammerstein模型的RRMSE為0.027 7,PI模型的RRMSE為0.433 5,100Hz輸入信號下,Hammerstein模型的RRMSE為0.030 1,PI模型的RRMSE為0.740 9,可見所建模型較靜態(tài)遲滯模型更能體現(xiàn)系統(tǒng)的率相關(guān)遲滯動態(tài)特性,且具有良好的泛化能力。
4 結(jié)論
傳統(tǒng)壓電陶瓷驅(qū)動器靜態(tài)遲滯模型無法體現(xiàn)系統(tǒng)率相關(guān)動態(tài)遲滯特性,針對這一不足,本文建立了AFM壓電陶瓷驅(qū)動器率相關(guān)遲滯Hammerstein模型,在體現(xiàn)系統(tǒng)動態(tài)特性的前提下,利用支持向量機描述系統(tǒng)的靜態(tài)線性部分。采用最小二乘支持向量機和奇異值分解法對模型中的參數(shù)進行辨識,計算量少,便于實施。實驗結(jié)果表明,本文提出的模型預(yù)測準確,較傳統(tǒng)靜態(tài)遲滯模型更能反應(yīng)壓電陶瓷驅(qū)動器的真實特性。建模方法對此類非線性動態(tài)系統(tǒng)具有較高的實際應(yīng)用價值。
[1]白春禮.掃描力顯微術(shù)[M].北京:科學出版社,2000:3-10.
[2]紀華偉,楊世錫,吳昭同.壓電陶瓷驅(qū)動器非線性建模研究[J].傳感技術(shù)學報,2006,19(4):1080-1081.
[3]Ping Ge,Musa Jouaneh.Generalized Preisach Model or Hysteresis Nonlinearity of Piezoceramic Actuators[J].Precision Engineering,1997,20(2):99-100.
[4]Ru C,Sun L.Hysteresis and Creep Compensation for Piezoelectric Actuator in Open-Loop Operation[J].Sensors and Actuators A:Physical,2005,122(1):124-130.
[5]張棟,張承進,魏強.壓電工作臺的神經(jīng)網(wǎng)絡(luò)建模與控制[J].光學精密工程,2012,20(3):587-589.
[6]王鈺鋒,郭詠新,毛建琴.壓電作動器的率相關(guān)遲滯建模與跟蹤控制[J].光學精密工程,2014,22(3):617-619.
[7]Guo yongxin,Sun gang,Wang yufeng.Modeling and Control of Rate-Dependent Hysteresis for PEA with MPI Model-Based Hammerstein System[C]//Bao yansong.2012 International Conference on Control Engineering and Communication Technology.Shenyang:IEEE,2012:523-526.
[8]Bai E W.A Blind Approach to Hammerstein Model Identification[J].IEEE Transactions on Signal Process,2002,50(7):1610-1619.
[9]Giri F,Bai E W.Block-Oriented Nonlinear Systems IDentification[M].Germany:Lambert Academic Publishing,2010:230-240.
[10]Adam Krzyzak,Marian A Partyka.Global Identification of Nonlinear Hammerstein Systems by Recursive Kernel Approach[J].Nonlinear Analysis,Theory,Methods and Application,2005,63(5-7):1263-1272.
[11]Chen H F.Pathwise Convergence of Recursive Identification Algorithms for Hammerstein Systems[J].IEEE Transactions on Automic Control,2010,49(10):1641-1649.
[12]向微,陳宗海.基于Hammerstein模型描述的非線性系統(tǒng)的辨識新方法[J].控制理論與應(yīng)用,2007,24(1):143-147.
[13]Pelckmans K,Goethals I,Suykens J A K,et al.On Model Complexity Control in Identification of Hammerstein Systems[C]//Eduardo F Camacho.Proceedings of the 4th IEEE Conference on Decision and Control,and the European Control Conference.Sevilla:IEEE,2005:12-15.
[14]王宏偉,韓云濤,彭繼慎.基于TSPSO支持向量機紅外甲烷傳感器動態(tài)補償[J].傳感技術(shù)學報,2013,26(9):1193-1195.
[15]Song Haiying,Gui Weihua,Yang Chunhua.Identification of Hammerstein-Wiener Model with Least Squares Support Vector Machine[C]//Central South University.Proceedings of the 26th Chinese Control Conference,Zhangjiajie,China:IEEE,2007:260-263.
[16]喬愛民,何博俠,張煒.基于LS-SVM及嵌入式技術(shù)的力敏傳感器溫度補償[J].傳感技術(shù)學報,2013,26(5):638-640.
[17]Ang W T,Garmen F A,et al.Modeling Rate-Dependent Hysteresis in Piezoelectric Actuators[C]//Volker Graefe.Proceedings of the 2003 IEEE/RSJ,International Conference on Intelligent Robots and Systems.Las Vegas,USA:IEEE,2003:1976-1982.
[18]Kuhnen K.Modeling Identification,and Compensation of Complex Hysteretic Nonlinearities-Amodified Prandtl Ishlinskii Approach[J].European Journal of Control,2003,9(4):407-418.
[19]Jiang Shaohua,Gui Weihua,Yang Chunhua.Vertical Quench Furnace Hammerstein Fault Predicting ModelBased on Least Squares Support Vector Machine and Its Application[C]//Zhang Siying.Chinese Control and Decision Conference.Guilin:Northeastern University Press,2009:203-206.
Hammerstein-Based Modeling Approach and Parameter Identification Method for AFM Piezoelectric Actuator*
XUYunyang,XUKangkang,SHENPing*
(State Key Laboratory of High Performance Complex Manufacturing,Changsha 410012,China)
The piezoelectric actuator(PEA)used in the Atomic Force Microscopy(AFM)possesses a feature of rate-dependent hysteresis,which have a negative influence on the scanning and positioning accuracy of AFM.As the traditional static nonlinear hysteresis model can’t reflect the dynamic frequency characteristics of the system,a Hammerstein model here is proposed to describe the static and dynamic hysteresis characteristics of the PEA.The parameters of the model is identified by the least squares support vector machine(LS-SVM)algorithm and the singular value decomposition(SVM)method.The experiment result indicates that the rate-dependent hysteresis is well reflected,and the model accuracy is better than the traditional static hysteresis model,its application value is desirable for the analogous systems.
piezoelectric actuator;nonlinear model;Hammerstein model;system identification;support vector machine

徐運揚(1989-),男,湖南邵陽人,碩士,主要研究方向為系統(tǒng)建模、智能控制以及微納米制造,xuyunyang2008@163.com;
徐康康(1990-),男,安徽淮北人,博士,主要研究方向為系統(tǒng)建模與溫度場的管理與控制,779771244@qq.com;
沈 平(1983-),男,陜西寶雞人,博士,主要從事復雜過程建模、自動控制、智能控制等方面的研究,dakonglong_31@163.com。
項目來源:國家重點基礎(chǔ)研究發(fā)展計劃基金項目(973)(2011CB013104)
2014-09-10 修改日期:2014-11-07
C:7320G;2860;7230
10.3969/j.issn.1004-1699.2015.01.005
TN792
A
1004-1699(2015)01-0023-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19