基于Stroke的道路網匹配
2015-05-09 03:48:00鄭貴省車亞輝李月明
軍事交通學院學報 2015年10期
王 鵬,鄭貴省,王 元,車亞輝,李月明
(1.軍事交通學院研究生管理大隊,天津300161;2.軍事交通學院基礎部,天津300161)
隨著空間技術和計算機技術的不斷發展,地理信息系統(geographic information system,GIS)已經廣泛地用于各行各業,特別是在交通領域,位置服務、車輛導航、交通規劃等已經大量采用GIS技術。但GIS數據的獲取一直是制約GIS發展的重要瓶頸之一,空間數據變化快、采集獲取代價大,如何維護數據的現勢性,是確保依托GIS提供準確服務的關鍵。目前,道路網發展速度驚人,線路變更周期短,只有路網空間數據變化的及時發現與更新,才能確保路網地理信息滿足服務需求。
針對路網數據更新的問題,大多采用不同來源的路網數據融合作為解決問題的途徑。其中路網數據匹配是完成路網數據融合的關鍵。文獻[1]針對道路實體匹配提出采用緩沖區增長的方法,通過設置待匹配弧段的緩沖區確定另一數據集中的候選匹配集,從而完成各種類型的線要素匹配。文獻[2]采用迭代最近點法進行道路網匹配,將道路網經拓撲處理后,建立“邊—節點”的數據模型,建立道路網絡的鄰接矩陣,將路網匹配轉化為節點匹配。文獻[3]提出了一種基于概率理論的匹配模型,模型中包含多個匹配指標,通過計算實體匹配概率大小來確定匹配實體。文獻[4]提出基于格網索引的“折線—節點”距離匹配算法,將路網折線間的幾何相似度轉換為節點到折線的距離,對大比例尺的目標數據建立格網索引,通過格網索引來提高計算效率。文獻[5]將道路網目標匹配分解為分解、基本和抽象3個匹配層次,利用緩沖區分析和拓撲關系等手段開發了系列算法,進而完成了各目標間的匹配。但目前的道路空間數據來源各異,數據質量很難得到保證,單條道路的整體性較難保持。單條道路往往有多條弧段構成,現有的匹配算法大都針對單一的弧段進行單獨匹配,未將道路看成一個整體,這就導致匹配后道路存在局部的誤匹配和未匹配,匹配結果的正確性很難得到保證。
1 路網結構Stroke表達
目前,道路網表達都采用“節點—弧段”模型,可用圖論的知識進行描述。也就是道路網可以表示成G=(V,E),其中G為帶權的圖,一條道路可以被分割成若干條邊E,每條邊之間的連接點用V表示,道路的拓撲關系可以通過邊與節點之間的連接關系表示。而道路網的stroke(路化)表達實際上是按照特定的規則將路段連接成一條平滑的stroke[6],利用 Gestalt視覺感知中的“良好連續性(good continuation)”原則連接在同一節點的弧段,若在該點處方向的偏差角小于一定的閾值,在視覺感受上方向一致,可以將這些弧段元素看著一個整體,即一個 stroke。如圖1所示,可將用“節點—弧段”表達的道路弧段a、c、e用一個stroke表達。從存儲上來說,可以有效減少邊和節點的數量,減少存儲空間,提高數據的整體性。
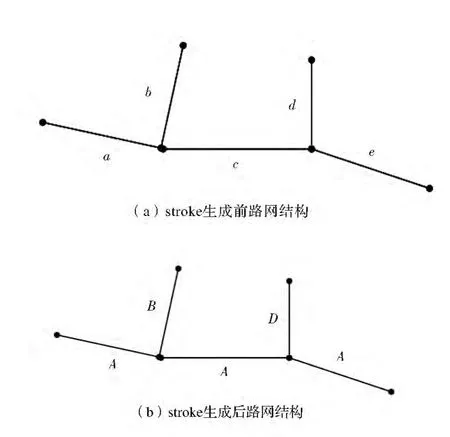
圖1 道路Stroke表達示例
道路stroke的選取,通常采用道路的屬性、弧段間偏向角度和弧段整體趨勢發展等來判斷。一般通過道路的屬性信息來判斷弧段是否屬于一條stroke比較準確,但在實際運用中,屬性信息有的不完整甚至缺失,這就導致無法生成準確的stroke。所以,通過設定偏向角度的閾值(30°~75°),來判斷弧段與關聯弧段的角度,選取stroke的候選弧段。在選取過程中,可能存在一條弧段與關聯弧段的偏向角度均小于閾值。如圖2所示,與a關聯的弧段b、c之間的偏向角均小于閾值,其都可作為stroke的弧段。這里引入全局最優原則,即在節點N處兩兩比較弧段間的偏向角,選取偏向角最小的一組作為stroke的弧段,可以看到弧段b和弧段e構成的偏向角遠小于弧段a和弧段b的偏向角,因此弧段b和弧段e可以構成單獨一條stroke,弧段a將選擇弧段c作為連接弧段。
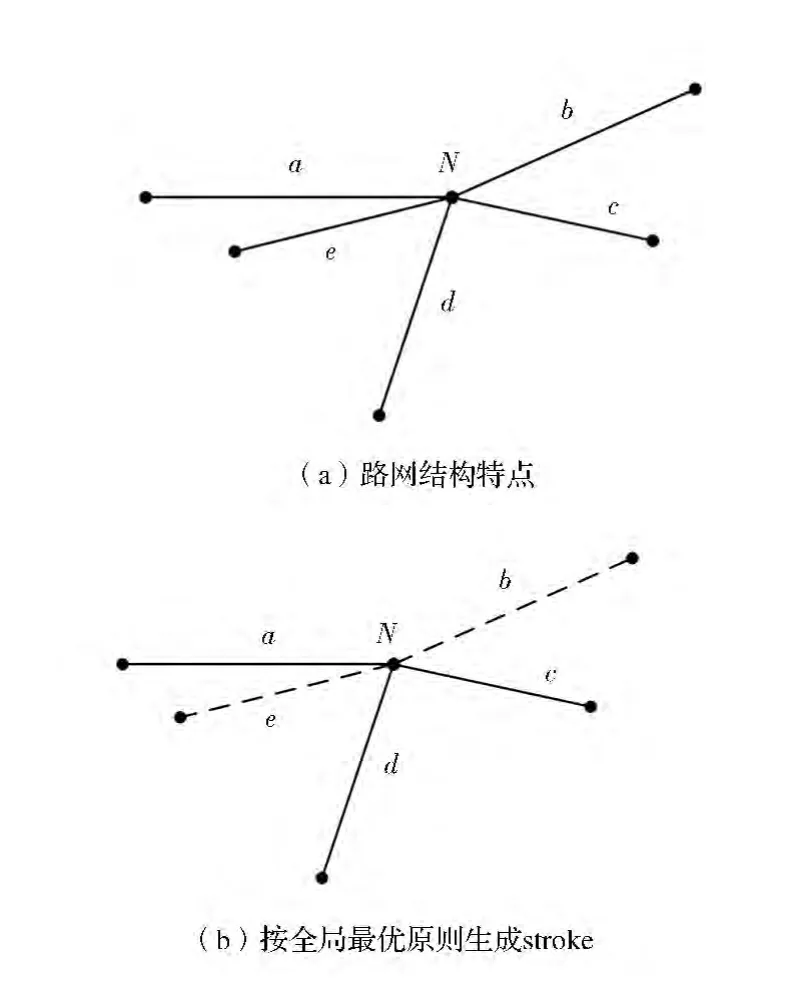
圖2 Stroke提取示例
在一些特殊區域,存在同一道路的弧段間偏向角大小超過設定的閾值。如圖3所示,若采用偏向角度來生成stroke,那弧段a和弧段c屬于一條stroke,但實際上弧段a和弧段b屬于同一條道路。這樣就導致生成的stroke與實際差距較大。
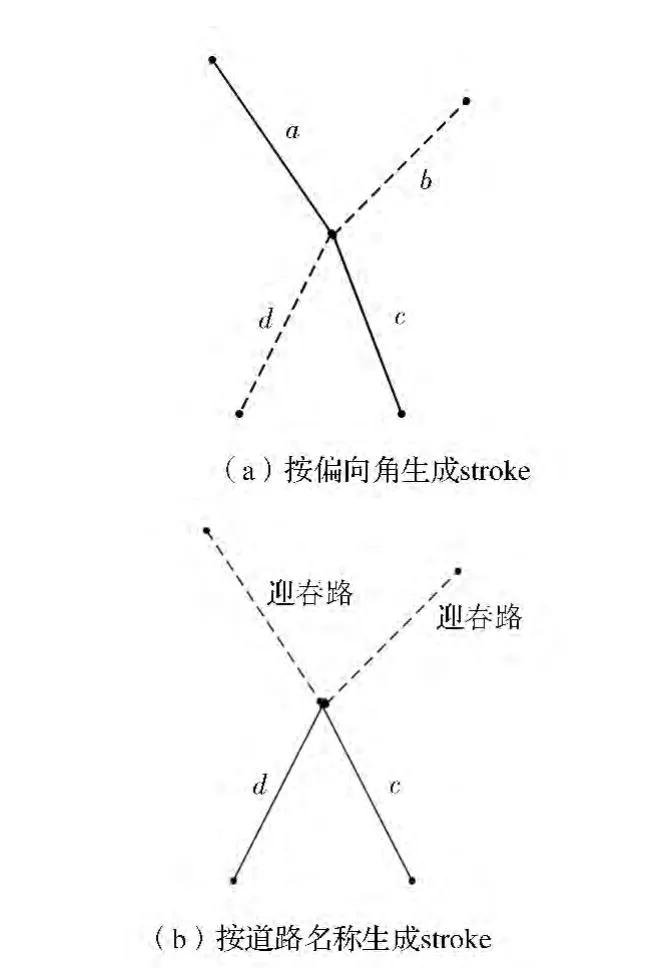
圖3 采用不同方式的Stroke選取示例
因此,為了確保數據的準確性,本文對路網數據先通過道路名稱一致性生成stroke,而后對不具備屬性信息的弧段采用偏向角生成stroke。
2 Stroke等級劃分與分組匹配
在完成道路stroke生成的基礎上,進行道路網絡的整體匹配。目前,在路網stroke匹配前,一般會事先對道路stroke采取量化等級劃分。等級越高的道路stroke,說明其在路網中的重要程度以及對路網通達性的影響較大,在匹配中應當優先考慮等級較高的道路匹配的成功率,確保路網匹配的整體準確性和實用性。在道路等級劃分中,一般采用道路類型屬性信息進行劃分,如國道、省道等。在屬性信息不完善時,可采用道路長度作為道路等級劃分的參考,道路長度越長,其服務的區域越廣闊,影響范圍越大,重要性就越高。道路的長度可以看作是構成路網的各子線段長度的總和。如圖4所示,設各子線段的端點為Pi的坐標為(xi,yi),i=0,1,2,…,n,則線段長度 L 為

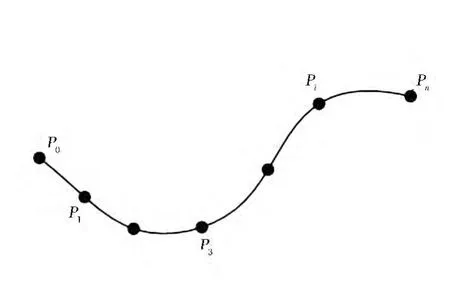
圖4 線長度表示
匹配是在目標數據集和參考數據集之間建立映射的過程。在stroke分組的基礎上,采用由整體至局部的匹配策略。根據上面stroke等級劃分的結果,利用stroke之間的關聯關系對stroke進行分組匹配,其基本流程如下:
(1)選取等級最高的 stroke,即長度最長的stroke,記作k,查詢與k首尾節點相連的 stroke,與k組成新的鏈Li;
(2)再查詢以L的首尾節點相連的stroke,重復上面過程,直至鏈L的首尾節點無相連的stroke,對鏈Li建立分組序號n;
(3)n=n+1,在剩下的stroke中重復上述步驟,至分組完畢;
(4)對目標數據集和參考數據集按步驟(1)—(3)處理,建立分組后,以序號作為索引,縮小搜索候選匹配stroke的范圍,對分組內的stroke按匹配判定方法進行匹配。
3 道路網Stroke匹配判定方法
對于線實體的匹配主要采用線的總長度、線的方向、線的最大弦等作為相似度匹配指標。由上面分組的結果可知,每組中stroke的長度以分組序號作為索引,具有相同分組序號的兩條stroke長度的比值越接近1說明其在幾何特征上可能越相似。但僅僅依靠長度是不夠的,選取匹配候選stroke實體后,通過stroke的首尾節點匹配,來確定stroke是否匹配,若首尾節點匹配可以認為stroke匹配。點匹配可由歐幾里德距離來確定,其計算式為

式中(xs,xt)和(ys,yt)分別為目標數據集和參考數據集的節點坐標。
若Δd小于閾值Δβ可認為兩個節點是匹配的,閾值的大小由數據的精度、以及比例尺等因素來確定,一般比例尺越小,其精度越低。
若首尾節點不能匹配,計算兩條stroke的空間鄰近度,采用中間面積法計算線實體之間的距離,以此來確定線之間的相似度[7]。其計算式為
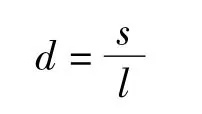
式中:s為兩條線首尾節點連接后圍成的區域;l為兩條線之間的平均長度。
若d越小說明兩條線圍成的區域面積就越小,其在空間的距離就越近(如圖5所示)。
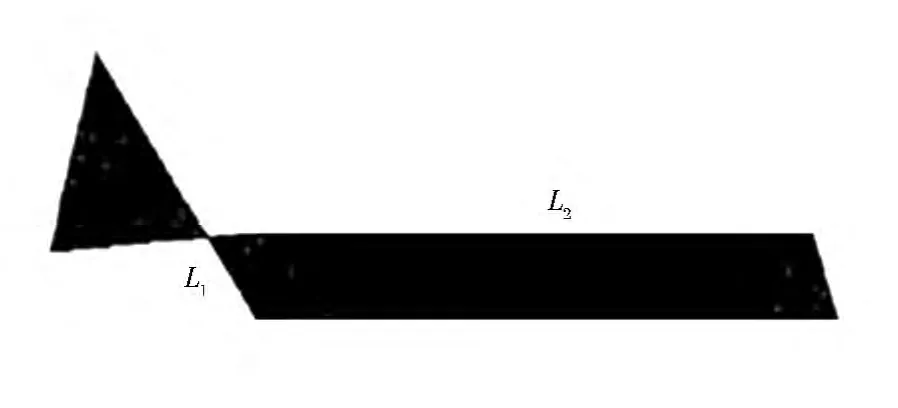
圖5 線實體之間圍成的面積
但是在實際運用中,存在兩條線實體,其中一條的長度遠小于另一條的長度。即在圍成的區域中,在視覺效果上存在著尾巴(如圖6所示)。
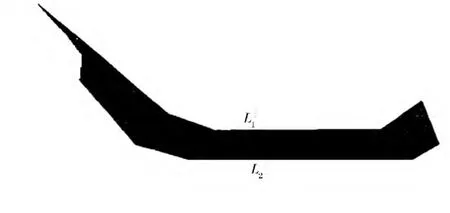
圖6 圍成的區域存在尾巴的情況
如果仍然采用原來的計算方法,將會產生較大的誤差。選擇長度較短的線實體的首尾端點投影到長度較長的一條線上(如圖7所示)。通過計算線L1在線 L2上的投影點 N1、N2,以及線端點M1、M2和線L1、L2圍成的面積,這樣就能有效避免出現長尾巴的情況,使距離測度能更客觀地反映出線的匹配度,更加符合人的視覺效果。
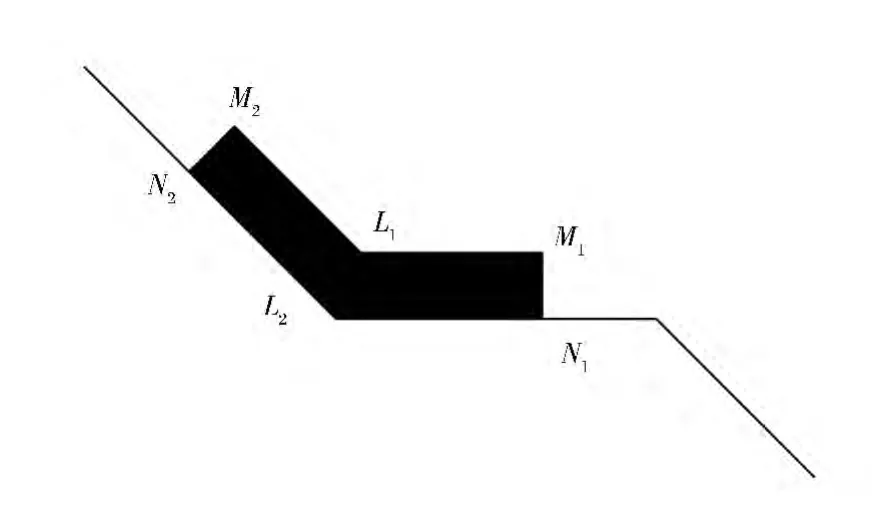
圖7 修正后的區域面積表示
4 實例驗證
本文從地理數據庫中提取青島市區1∶10萬和1∶20萬的城市道路數據進行匹配,按照上述方法分別對數據源提取stroke后,以1∶10萬作為參考數據集進行匹配(如圖8所示)。
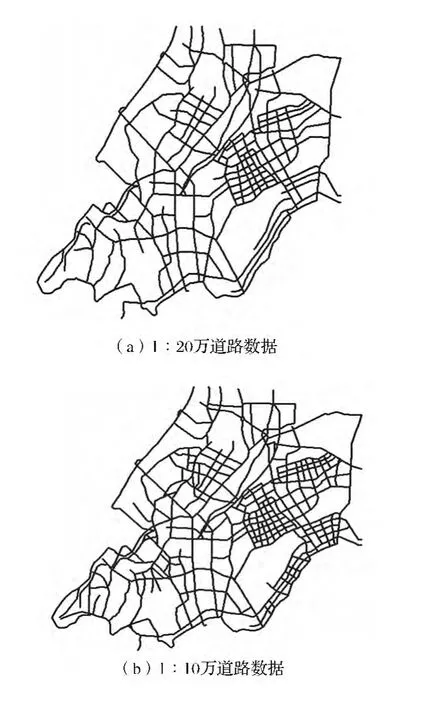
圖8 參與匹配的道路數據
由于提取的城市道路數據中道路等級劃分層次多,等級較高的主干道一般具備道路名稱的屬性,而且長度較長,而等級較低的支路道路名稱一般不全,而且容易被其他道路分割,因此,該提取的數據有利于驗證本文算法的有效性。
在道路數據匹配后,進行了人工目視檢查與更正,圖9為參與匹配的路網數據不能匹配的部分。圖10為局部區域匹配放大圖,可以看出,參與匹配的數據對應的路段R1與T1、R2與T2基本匹配,而1∶10萬道路數據中的R3則不存在匹配對象,其原因可能是道路更新或在地圖繪制中舍棄了部分細節。采用匹配方法能較清晰地發現不同數據源中道路的變化,能夠與人工目視判別得到較一致的結果。
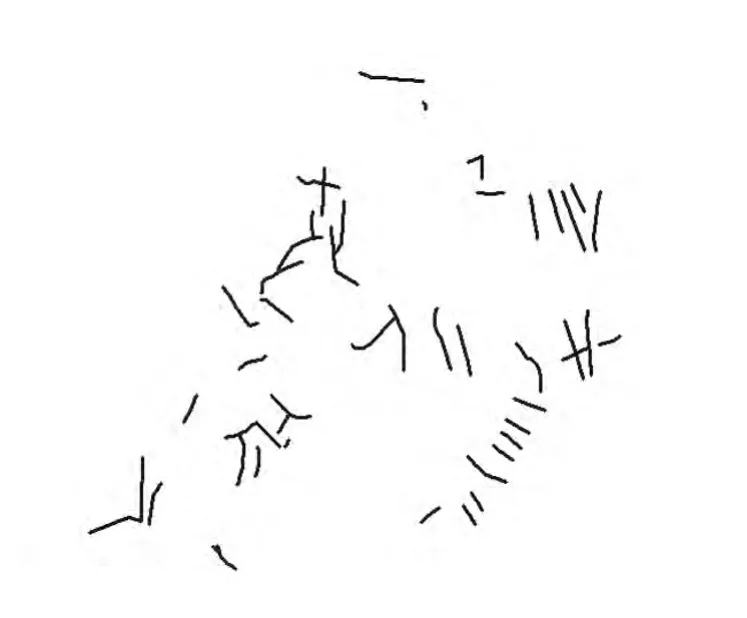
圖9 數據中不能匹配的部分
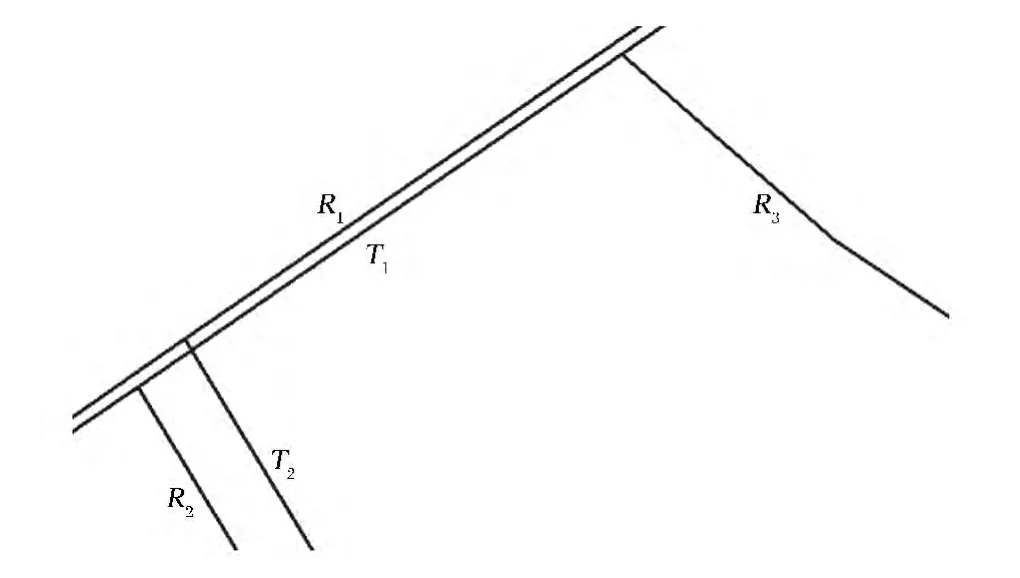
圖10 道路匹配結果的部分區域
5 結語
道路空間數據匹配一直是路網數據發現和更新的關鍵技術,本文通過對道路網絡數據選取stroke,并根據其長度劃分了stroke等級,在等級劃分基礎上建立了節點關聯的stroke分組,并以分組序號作為索引對路網進行匹配,可以縮小選取匹配對象的范圍。該方法有效降低了道路網數據邊和節點的數量,降低了路網表達的復雜度,并且維護了道路的整體性。在stroke分組匹配中,采用了由整體至局部的匹配方法,通過計算相對簡單的節點間匹配,來進行初始匹配判斷,有效地減少了計算的復雜程度。但本文采用的方法只能針對結構相對比較簡單的道路數據,即不具備交叉口和單雙行道等復雜的結構。對具備這些特征的復雜路網匹配,改進匹配方法,將是下一步研究的方向。
[1] Walter V,Fritsch D.Matching spatial data sets:a statistical approach[J].International Journal of Geographical Information Systems,1999,13(5):445-473.
[2] Zhang M.Methods and implementations of road-network matching[D].Munich:Technical University of Munich,2009:23-67.
[3] 童小華,鄧愫愫,史文中.基于概率的地圖實體匹配方法[J].測繪學報,2007,36(2):210-217.
[4] 陳玉敏,龔健雅,史文中.多尺度道路網的距離匹配算法[J].測繪學報,2007,36(1):84-90.
[5] 胡云崗,趙仁亮,李志林,等.地圖數據縮編更新中道路數據匹配方法[J].武漢大學學報(信息科學版),2010,35(4):451-456.
[6] Thomson R C.The stroke concept in geographic network generalization and analysis[C]//Proceedings of the 2th International Symposium on Spatial Data Handling,Vienna,2006:681-697.
[7] 張橋平.地圖數據庫實體匹配與合并技術[D].武漢:武漢大學,2002:55-76.
