基于Pro/E的復雜機構運動仿真設計
2015-05-09 03:48:04柴樹峰張學玲李玉蘭任保全
軍事交通學院學報 2015年11期
柴樹峰,張學玲,李玉蘭,任保全
(1.軍事交通學院軍事物流系,天津300161;2.北方通用動力集團有限公司六一六廠艦船動力部,山西大同037036)
對于復雜機構的設計,當前的研究方法主要是解析法,例如,利用圖論研究機構的數綜合,利用矢量法進行機構的分析與綜合,利用矩陣變換進行求解,利用數值積分進行機械盈虧功計算等。但是,對于復雜的機構,這些解析計算過程是相當復雜的,常常由于難以建立正確的解析數學模型而無法獲得較理想的解。并且,利用機構學的基本理論建立復雜機構的數學模型后,求解多個非線性方程組成的方程組的問題仍是復雜機構設計中一個難題,特別是精確求解5個以上非線性方程組成的方程組的問題更是難點[1-3],設計計算過程繁瑣、效率低,往往需要對原型進行較大的簡化并引入更多的假設,分析方法比較粗略,分析結果不夠可靠、直觀,只能用來對復雜機構的設計方案作定性的比較分析,而不能作定量的評價。
利用仿真的方法可以有效地解決上述問題,即按照機構的運動原理創建出運動模型,進一步對該模型進行仿真研究來確定合理的結構參數[4-5]。機構運動學分析是機構綜合與力分析的基礎,用一種直觀、動態的方式表達運動過程。運動學仿真能有效地解決復雜機構的設計、分析、優化等問題,在不浪費材料的前提下,能用最短時間獲得復雜機構的最優設計方案。
1 Pro/E運動仿真
1.1 Pro/E的機構運動仿真功能
現今主流的CAD/CAM/CAE一體化三維軟件Pro/E,是參數化技術的最早應用者,在目前的三維造型軟件領域中占有著重要地位,其作為當今世界機械領域的新標準得到業界的認可和推廣。Pro/E三維模型的幾何特征有嚴格的數據定義,不僅具有強大的復雜零件造型和數控加工編程功能,還具有全相關性、基于特征的參數化造型、數據管理、裝配管理等優勢[6]。
Pro/E軟件的機構分析模塊(mechanism)包括運動仿真、機構分析兩個功能,可以進行機構的運動學、動力學仿真分析。利用機構分析模塊,當各個零部件通過裝配模塊組裝成一個完整的機構后,就可以根據設計意圖定義機構中的齒輪副或凸輪副等連接關系,設置伺服電動機作為機構的動力來源;如果機構運動復雜,還需要添加彈簧、力、轉矩等其他設置,然后運行各種機構分析,如位置、運動學、動態等,并可根據測量分析獲得結果報告。
當分析機構的運動時,可以觀察并記錄分析過程,或測量位置、速度、加速度、力等量,然后以圖形形式表示這些量。也可以創建軌跡曲線和運動包絡,用物理方法描述運動。通過輸出動畫形式、參數形式,觀察機構的整體運動軌跡和各零件之間的相對運動,檢測干涉情況,再根據仿真結果對所設計的零件進行反復修改,直到滿足設計要求。
1.2 機構運動仿真過程
機構運動仿真就是根據給定的原動件規律,求出其他機構的運動參數。
機構仿真周期主要由總體方案設計、建立模型、求解模型、輸出結果和調整模型重新分析設計幾部分構成。機構運動仿真過程如圖1所示[7]。

圖1 機構運動仿真過程
2 復雜機構設計和運動分析實例
對于設計的復雜機構能否滿足功能和性能要求,需要檢驗,尤其是對運動速度、加速度等要求較高的機構,在靜止情況下不能直觀看出運動性能指標,需要進行運動仿真分析。
槽輪機構是一種典型的復雜間歇運動機構,廣泛應用于機械傳動裝置中,傳統的槽輪手工設計通常用二維工程圖表示三維實體模型,不能直觀逼真地顯現出槽輪的結構特征。同時,用該方法生成的模型幾何數據不能直接用于模具設計、有限元分析、機構運動分析、計算機數控加工,要做大量反復的分析與計算,設計效率低[7]。
以槽輪機構為例,基于Pro/E軟件進行結構設計和運動仿真分析。根據功能要求設計一個外槽輪機構,由支架、主動輪和槽輪組成(如圖2所示)。槽數z=4,給定中心距a,設計該槽輪機構,使其能滿足主動輪做勻速連續轉動時,槽輪做作反向的間歇轉動。
2.1 理論設計計算
根據槽輪機構幾何關系,進行零件尺寸計算[8],可得
從動輪運動角為

圖2 槽輪機構示意

主動輪運動角為

圓銷回轉半徑為

槽輪槽口回轉半徑為

圓銷半徑(輪槽寬)為

鎖止弧半徑為

式中Kx為鎖止弧半徑系數,當 z=4時,Kx=0.35。
當圓柱銷數 k=1、中心距 a=130時,由式(1)—(6)得到:從動輪運動角 β=45°,主動輪運動角 α=45°,圓銷回轉半徑 R1=91.92,槽輪槽口回轉半徑R2=91.92,圓銷半徑r≈15,鎖止弧半徑Rx=64.34(以上長度均為當量單位)。根據可以確定的設計計算結果,得到外槽輪機構各個零件的示意圖(如圖3所示)。
2.2 運動學分析
要進行運動學分析,首先需要創建零件模型,把根據設計理論計算出的機構尺寸數據輸入到Pro/E中,創建出零件三維模型,其次,對零件模型進行裝配。圖4為創建的外槽輪機構,由帶圓銷的主動輪、具有徑向輪槽的槽輪和支架組成。主動輪繞軸O1做勻速運動,在圓銷未進入槽輪的徑向槽時,主動輪的凸圓弧進入槽輪的凹圓弧,槽輪因受到凹凸兩弧的鎖合而保持靜止;當主動輪的圓弧運動至槽輪內凹弧的中點時,凹凸兩弧的鎖止作用終止,主動圓銷進入槽輪的徑向槽開始驅動槽輪,使槽輪繞軸O2轉動;當圓銷脫離槽輪的徑向槽時,主動輪的外凸弧又將槽輪鎖住,槽輪又停止運動。

圖3 槽輪機構示意
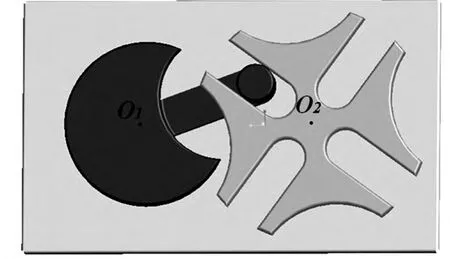
圖4 槽輪機構傳動
根據理論設計出的槽輪機構,能否正確嚙合以及能否滿足所要求的運動形式還未知。為檢驗該槽輪機構的運動情況,就要對其進行運動學仿真分析和干涉檢查,以進一步驗證之前的理論設計。
(1)運動副設置。主動輪在O1點,槽輪在O2點,分別設置轉動副,圓銷與輪槽、主動輪外圓與槽輪鎖止弧之間為高副連接,可設置為“凸輪副”。
首先,使主動輪的圓銷面與槽輪的輪槽面相對齊,把當前設置狀態作為初始位置做成快照Snapshot1,以備在后面仿真過程中使用。進入機械設計環境,檢測模型連接成功后,再對裝配好的槽輪機構創建凸輪連接,需要建立兩個“凸輪副”,分別為槽輪的輪槽與圓銷之間和槽輪的4個大圓弧面與鎖止弧之間的凸輪副,且均選中“啟用升離”。
之后,定義伺服電動機,選擇主動輪的連接軸作為伺服電動機的驅動對象,并且規定電動機的正確轉動方向,設定軸的當前位置為初始角位置,定義伺服電動機的速度為50(°)/s。
最后,進行運動分析定義,在仿真類型中選擇“運動學”選項,可以得到機構的運動情況。定義模擬時間為100 s。在初始配置中選擇之前設置的快照Snapshot1,以保證運動的起始位置是正確狀態。單擊“運行”,查看設置好的槽輪機構的運行情況。
(2)運動干涉檢查。在上一步建立的運動仿真下,可以檢查槽輪機構中各個零件的干涉情況。在“碰撞檢測設置”里選擇“全局碰撞檢測”,即檢查整個組件中的各種碰撞,并根據所選擇的選項將其指出。待干涉檢查完畢,在動畫模式下,可以看到槽輪機構的整體運轉情況良好,未發現代表干涉的紅色線條和區域,表示不存在干涉情況或者干涉較輕,可以忽略(如圖5所示)。如果存在干涉,可以按照式(7)—(10)調整設計參數,如圓銷半徑、槽底高、槽深、撥盤的軸徑、槽輪的軸徑等,直到滿足設計要求。
槽底高為

槽深為

撥盤的軸徑為

槽輪的軸徑為

(3)運動分析。令模型運轉一次停止,可以看到裝配機構的整體運行情況良好。分別定義測量槽輪轉速、主動輪轉速、槽輪角加速度、主動輪角加速度,運行結束后系統將自動計算,并顯示出當前最終運行結果值,也可自動生成各個變量的測量結果圖形。本實例兩個主要零件的轉速變化曲線如圖6所示。

圖5 干涉檢測
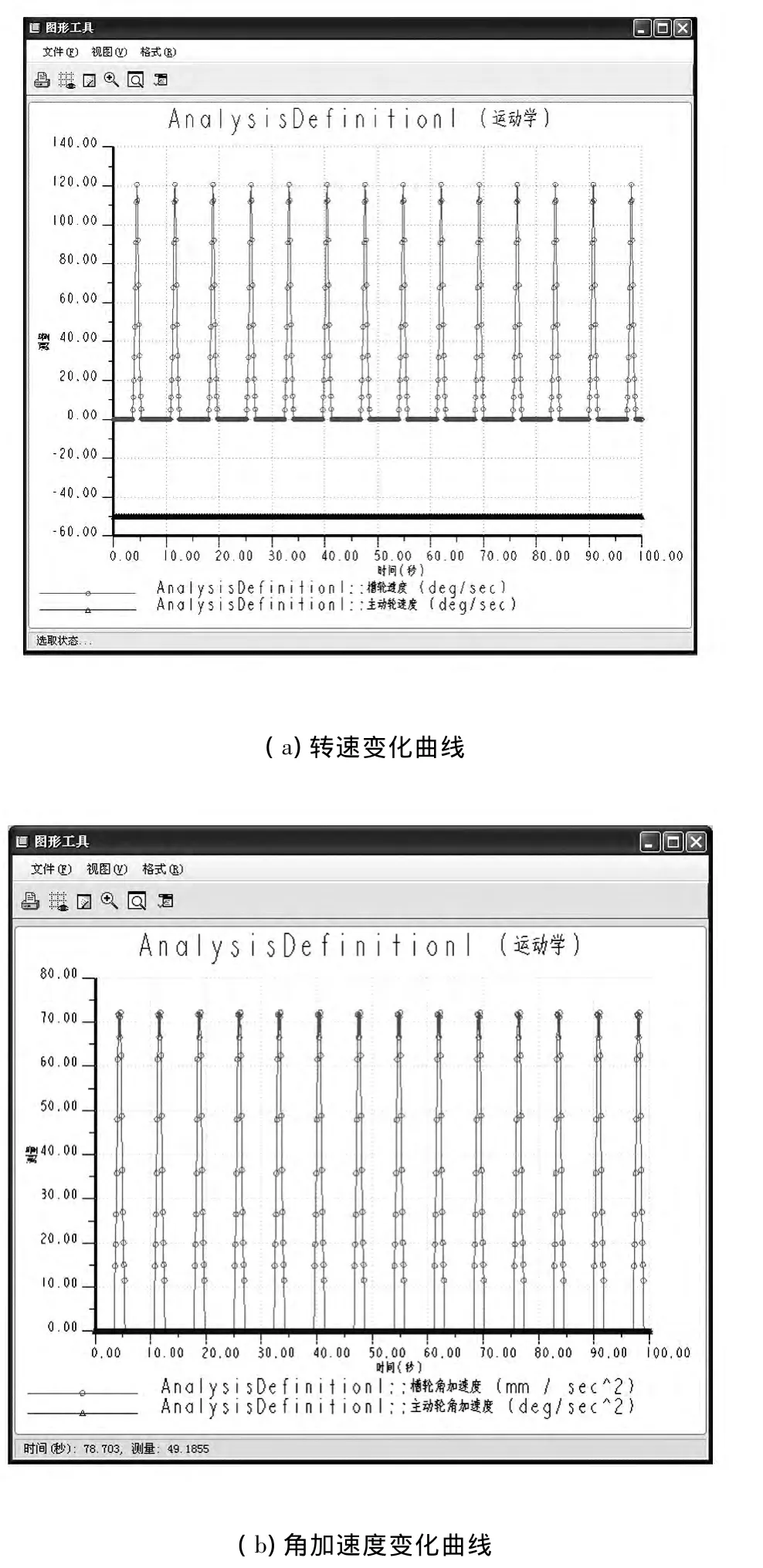
圖6 輸出測量結果圖形
可以看到最終的測量結果是當主動輪的轉速為50(°)/s時,槽輪的轉速按一定曲線規律變化,主動輪角加速度為0,槽輪角加速度與其轉速類似,也是按一定曲線呈有規律的變化。并且,當主動圓銷開始進入和離開徑向輪槽的瞬時存在有剛性沖擊。因此,該槽輪機構做間歇運動,其轉速、角加速度的仿真結果均與預期相符,滿足設計要求。
在實際設計中,當增加圓柱銷個數時,運動曲線變化頻率就會增加,也可以調整某些設計參數,直至速度、加速度曲線滿足特定要求。
3 結語
通過以復雜機構設計中常見的槽輪機構為例,在理論設計后,再進行運動仿真,并對仿真結果進行分析,體現了在仿真環境下進行機構運動仿真設計的優越性,不但能使機構的造型形象化、可視化,而且也使整個設計過程更加準確、快捷。在實際工程應用中,設計人員可以使用上述方法建立復雜機構模型,進行運動學仿真分析,再根據仿真結果進行修改設計直至滿足設計需求,從而提高對各類復雜機構的設計效率。教員在機械設計教學中,也可以通過結合復雜機構的運動仿真分析來幫助學員理解復雜機構的設計原理,加深其對復雜機構設計理論的認識,進而提高機械設計教學效果。
[1] 張春林.高等機構學[M].2版.北京:北京理工大學出版社,2006:4-7.
[2] 韓建友.高等機構學[M].北京:機械工業出版社,2004:2-8.
[3] 尹芳.復雜機構動力學仿真的結構建模法[J].武漢輕工大學學報,2014(3):53-56.
[4] 孫偉,李朝峰,劉杰,等.面向復雜機構設計的參數化仿真技術研究[J].東北大學學報(自然科學版),2008(9):1318-1321.
[5] 儲偉俊,蔡曉文.應用反向動力學實現復雜機構運動的三維虛擬模擬[J].建筑機械,2004(6):70-72.
[6] 葛正浩,楊芙蓮.Pro/Engineer Wildfire 3.0機構運動仿真與動力分析[M].北京:化學工業出版社,2008:2.
[7] 張海元,王曉英,侯成波,等.基于Pro/E槽輪機構建模及運動仿真[J].煤礦機械,2009(6):191-193.
[8] 柴樹峰,張學玲.機構設計及運動仿真分析實例[M].北京:化學工業出版社,2014:2-3,172.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
