魷魚加工專用設備控制系統設計
2015-05-07 02:49:14曾紅邢宏偉陳志濤
機械工程師 2015年1期
曾紅, 邢宏偉, 陳志濤
(哈爾濱理工大學榮成學院,山東 榮成 264300)
0 引言
隨著海洋食品市場的不斷發展壯大,海洋食品加工機械也在日趨完善。魷魚是我國東南沿海產量較大的一種海洋食品。魷魚制成的食品種類很多,而在我國魷魚的生鮮食品加工自動化的程度相對較低。魷魚屬于軟體動物類,加工時難定位,原料易變形。為解決魷魚加工時的難點,對魷魚頭加工設備設計一套自動控制系統。通過自動控制系統對整個機構進行集成控制,實現了魷魚專用加工設備傳送機構、刀具執行機構、氣源控制機構的自動化運行,提高了海產品加工過程中的效率。
1 設備結構概述
魷魚專用加工設備是采用步進電機,帶動彎板鏈輪,使連接在彎板鏈條上的五等分魷魚頭托盤運動。當托盤到達預定位置,由空心五等分刀具將魷魚頭切成五等分,并將魷魚嘴從魷魚頭中取出。完成切割動作,托盤向前運動并將托盤中切割好的魷魚爪送至出料口,由落料裝置將魷魚爪從托盤取出。

圖1 Pro/E的機構運動模擬圖
2 步態、驅動系統設計
魷魚專用加工設備主要動作循環為:開啟啟動開關后,由1號工位檢測敏感元件[1]檢測刀桿限位開關是否到達指定位置。若刀桿不到達指定位置,氣缸將刀桿向上頂起送到指定位置。刀桿到達預定位置后,步進電機開始運轉,通過彎板鏈條將動托盤送至指定位置。2號工位檢測敏感元件檢測到托盤上定位基準塊,步進電機停止運轉。此時電磁閥通電,使氣缸帶動刀具及精確定位裝置一起運動,完成魷魚頭的切割及魷魚嘴的取出動作。切割動作的同時3號工位檢測敏感元件檢測刀具是否完成切割動作。完成切割動作發出信號,使電磁閥斷電,氣缸帶動刀具向上運動。刀具回程至1號工位處,步進電機重新運轉,帶動托盤繼續向前運動,從而實現其動作的循環。
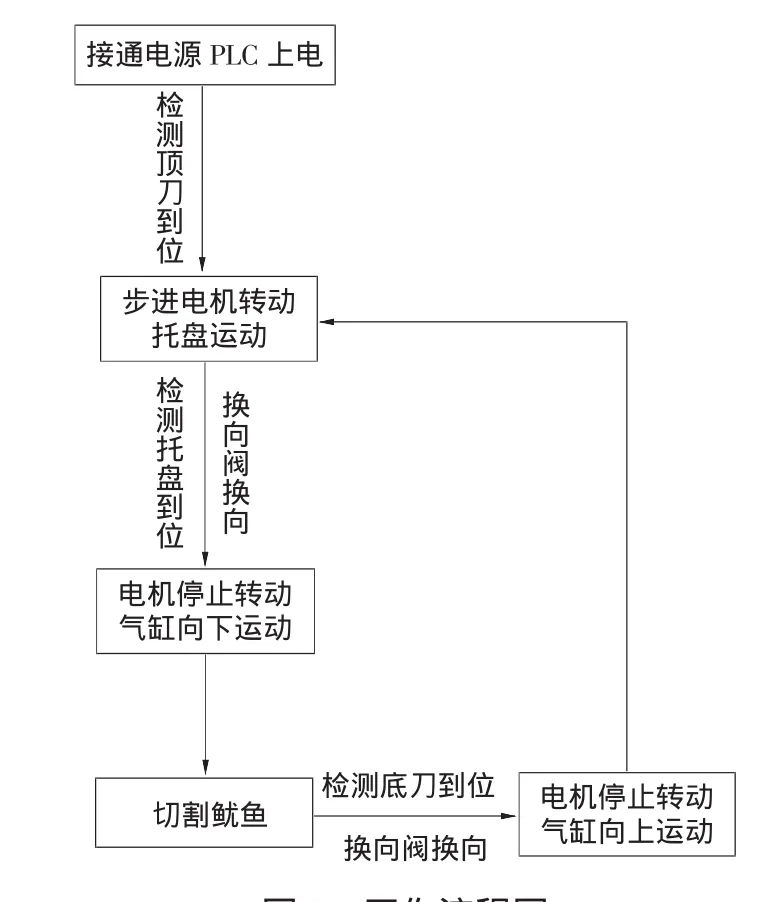
圖2 工作流程圖
驅動系統由傳送系統與執行系統兩部分組成,由MCU進行集成控制。傳送系統由MCU控制步進電機驅動[2],帶動彎板鏈條運動,使托盤在導軌上能夠平穩運動。步進電機由單獨外部供電系統進行供電,并安裝與其配套的電機驅動器模塊進行驅動。其工作電壓要穩定在35~40 V之間,就可提供轉動力矩為4 N·m的工作扭力。調節驅動器的細分與輸出電流大小來改變電機的運轉速度,以及電機的輸出轉矩。執行系統由檢測敏感元件與MCU配合使用,對氣缸的往復運動及刀具運動行程進行檢測與控制。
3 控制系統設計
3.1 電路設計
機械執行機構的動作需由電氣系統進行控制[3]。設備采用模塊化的設計,主控芯片采用STC89C52,使用MCU最小系統作為核心。設備采用0~50 V可調直流穩壓電源,MCU的I/O輸出口與3個金屬感應檢測敏感元件進行連接。可控電磁閥占用2個I/O輸出口,一對啟保停控制開關占用2個I/O輸出口,電機驅動器控制口占用4個I/O輸出口,電源占用2個I/O輸入口。

圖3 最小系統電路圖
3.2 控制原理
電氣控制原理是針對MCU控制系統算法[4],檢測敏感元件在不同工位進行讀取信號,并傳遞到MCU完成計算過程,使設備按照規定流程完成相應動作。
3.2.1 控制系統算法
電機轉速由單位時間內獲取的脈沖數決定,單位脈沖乘以周期即可獲得一次工作循環中電機接收到的總脈沖數,電機以步進角形式轉動[5]。操作人員根據現場實際生產情況調節電機的運轉速度,以此滿足不同生產要求。
3.2.2 protues仿真
開發過程中使用Protues軟件進行仿真,主要由MCU最小系統、實驗樣機、OSC三個部分組成,根據OSC的波形周期及占空比來修改程序,同時檢測設備在不同波形下的工作狀態。

圖4 protues仿真
3.2.3 檢測模塊
設備采用LJ12A3-4-Z/EX檢測敏感元件,安裝到設備的刀具執行位置。檢測敏感元件共有VCC與OUT2個引腳。VCC引腳連接4.5~5 V電壓,OUT引腳為輸出信號端,常態為+5 V高電平,檢測到定位基準塊后產生低電平。MCU不斷地檢測I/O口的狀態來判斷執行機構是否到達指定位置,選擇不同輸出,實現電磁閥通斷電。
3.2.4 串口通信模塊
串口通信采用PL2303模塊,模塊為一種高度集成的RS232接口轉換器,將上位機的指令由COM端口輸出信號轉換為TTL電平,使MCU能夠接收到PC機傳輸的數據。

圖5 串口通信模塊電路圖
3.2.5 MCU接收數據模塊
上位機與MCU的通訊,采用串口通訊方式[6]。上位機將程序通過串口植入MCU,這個過程叫燒路。計算機只能識別自身的機器語言,即二進制數(只含0、1),MCU將接收到的程序間隔放入其程序存儲器中,通過調用不同數據,MCU做出不同響應。
4 程序編制


圖6 串口中斷流程圖

設置端口屬性:
打開串口
serialPort1.Open();
設置串口號,波特率,校驗位,數據位,停止位:
serialPort1.PortName="COM1";
serialPort1.BaudRate=9600;
serialPort1.DataBits=8;
serialPort1.Parity=System.IO.Ports.Parit.None;

圖7 串口的打開與關閉流程圖
serialPort1.StopBits=System.IO.Ports.StopBits.One;
運用write函數發送數據:
Write(Convert.ToChar(0x03),
Convert.ToChar(0x05),
Convert.ToChar(0x05));
5 結語
本文論述的魷魚專用加工設備的控制系統,基于MCU控制系統,利用智能節點采集原始數據并與上位機進行通訊,針對魷魚專用加工設備進行控制。對步態動作進行優化,同時使用OSC進行可靠的通信實時性監測,保證控制系統能夠可靠運轉,從而實現魷魚生鮮食品的自動化生產。
[1] 向丹.傳感器原理及應用教改新探[J].廣東技術師范學院學報,2008(6):89-91.
[2] 董曉慶.步進電機驅動器的關鍵技術研究[J].單片機與嵌入式系統應用,2008(6):14-17.
[3] 曾方.構建“機械制造電氣技術”課高職模式的嘗試[J].遼寧教育學院學報,2001(4):93-95.
[4] 劉國永,陳杰平.單片機控制步進電機系統設計[J].安徽技術師范學院學報,2002(4):61-63.
[5] 劉心剛.直流穩壓電源失效機理及實驗的研究[D].北京:北京化工大學,2007.
[6] 王翠珍,唐金元.可調直流穩壓電源電路的設計[J].中國測試技術,2006(5):113-115.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2018年11期)2018-08-04 03:26:08
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年12期)2016-04-16 02:52:00
