三軸慣導測試轉臺尋零方法應用研究
2015-05-06 03:11:38曹院,魯浩
兵器裝備工程學報 2015年8期
關鍵詞:測量
曹 院,魯 浩
(中國空空導彈研究院,河南 洛陽 471009)
【基礎理論與應用研究】
三軸慣導測試轉臺尋零方法應用研究
曹 院,魯 浩
(中國空空導彈研究院,河南 洛陽 471009)
為了滿足在三軸轉臺上測試捷聯式慣導系統導航性能的要求,必須精確確定三軸轉臺的初始零位;介紹了北向基準的建立方法,詳細闡述了三軸轉臺3個框軸的尋零方法;經慣導系統導航測試實驗證明,此方法滿足導航測試要求。
三軸轉臺;尋零;北向基準;經緯儀;數字水平儀
捷聯式慣導系統在三軸轉臺上測試其導航性能時,必須確定其測試初始時刻的姿態信息,即確定三軸轉臺在初始時刻的位置信息,則必須對轉臺三個框軸尋零。考慮到捷聯式慣導系統的坐標系及其夾具的安裝方式,設定此時三軸轉臺位置為零位,即外框平面鏡法線方向指北,內框旋轉法線方向垂直指天,內框零位由捷聯式慣導系統夾具安裝位置確定。
1 北向基準的建立

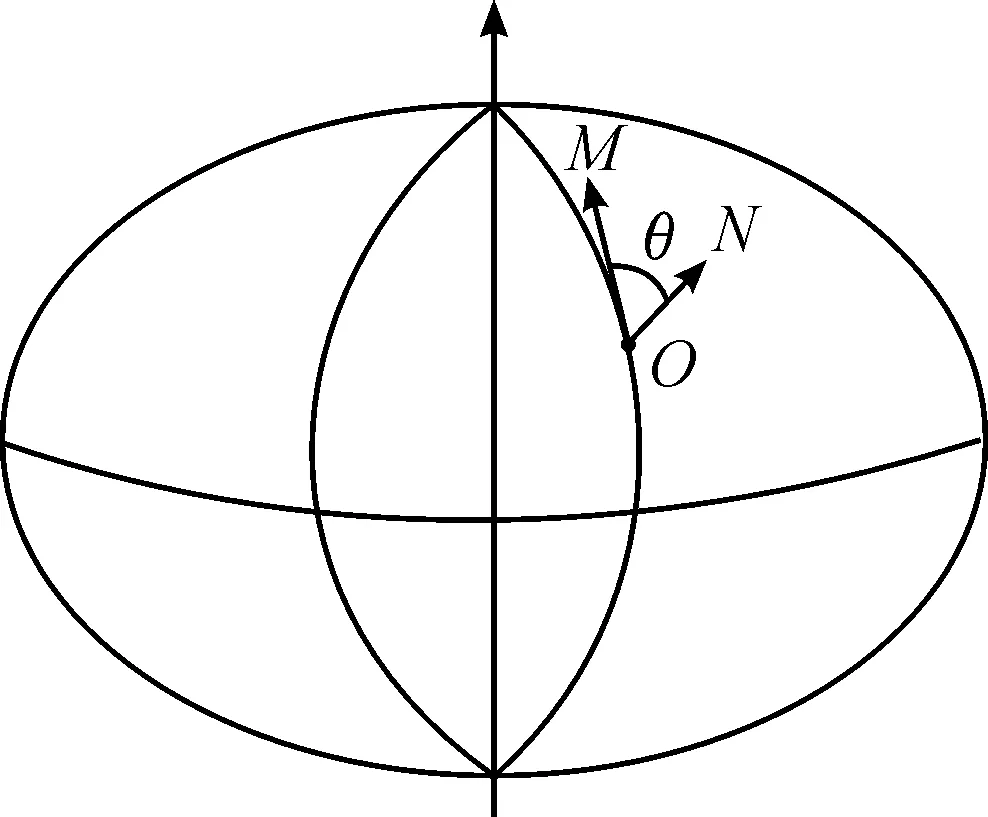
圖1 真北方位角定義
當實驗室有北向基準時,采用經緯儀自準直和互瞄傳遞法即可對三軸轉臺尋零,當實驗室無北向基準時,采用北向基準建立的方法也可對三軸轉臺尋零。本實驗室已建立北向基準,如圖2所示,在花崗巖材質的固定臺體(其基礎與周圍地面隔離)的表面上固定安裝一立方鏡,此立方鏡正面法線方向為北向基準,其標定精度(標準偏差)不大于6″。

圖2 基準立方鏡
建立此北向基準采用高精度陀螺經緯儀Y/TJD-1,其定向精度為5″,且具有自準直功能。實施步驟如下:
1) 天文方位測量。在空曠處選擇可相互通視、相距140m的兩點,釘入測釘,以測釘中心作為觀測標志,測釘之間的連線為天文方位邊。采用北極星任意時角法,在方位邊兩端測站獨立對向觀測,測定方位邊的真北方位角,作為標定陀螺經緯儀常數偏差的已知方位。
2) 陀螺經緯儀常數偏差標校。陀螺經緯儀常數偏差的標校在天文方位邊上進行。陀螺經緯儀采用三腳架激光對中,覘牌為光學對點器對中。由于這兩種對中方式的對中誤差不超過0.5 mm,對于140 m的邊長,由對中誤差引起的方向誤差不超過0.7″,因此此方向誤差相對于陀螺經緯儀的定向誤差而言可以忽略。
在對立方鏡法線方位標定前、后,均需獨立標校陀螺經緯儀常數偏差一次,且兩次標校間隔時間不超過3 d,并取兩次獨立標校的平均值作為陀螺經緯儀常數偏差。
設天文方位邊的已知方位為An,陀螺經緯儀測量的方位為Tn,則陀螺經緯儀的常數偏差為
γ=An-Tn
3) 立方鏡法線方位標定。陀螺經緯儀對立方鏡進行自準直,其方向的反向為立方鏡的法線方向。陀螺經緯儀觀測6測回,取平均值作為方位測量結果。

2.三軸轉臺尋零
2.1 外框尋零
以實驗室北向基準為方位基準,采用經緯儀自準直和互瞄傳遞方法對外框尋零,其示意圖如圖3所示。選用的兩臺經緯儀型號均為TM5100A,其測角精度為0.5″,且具有自準直功能。
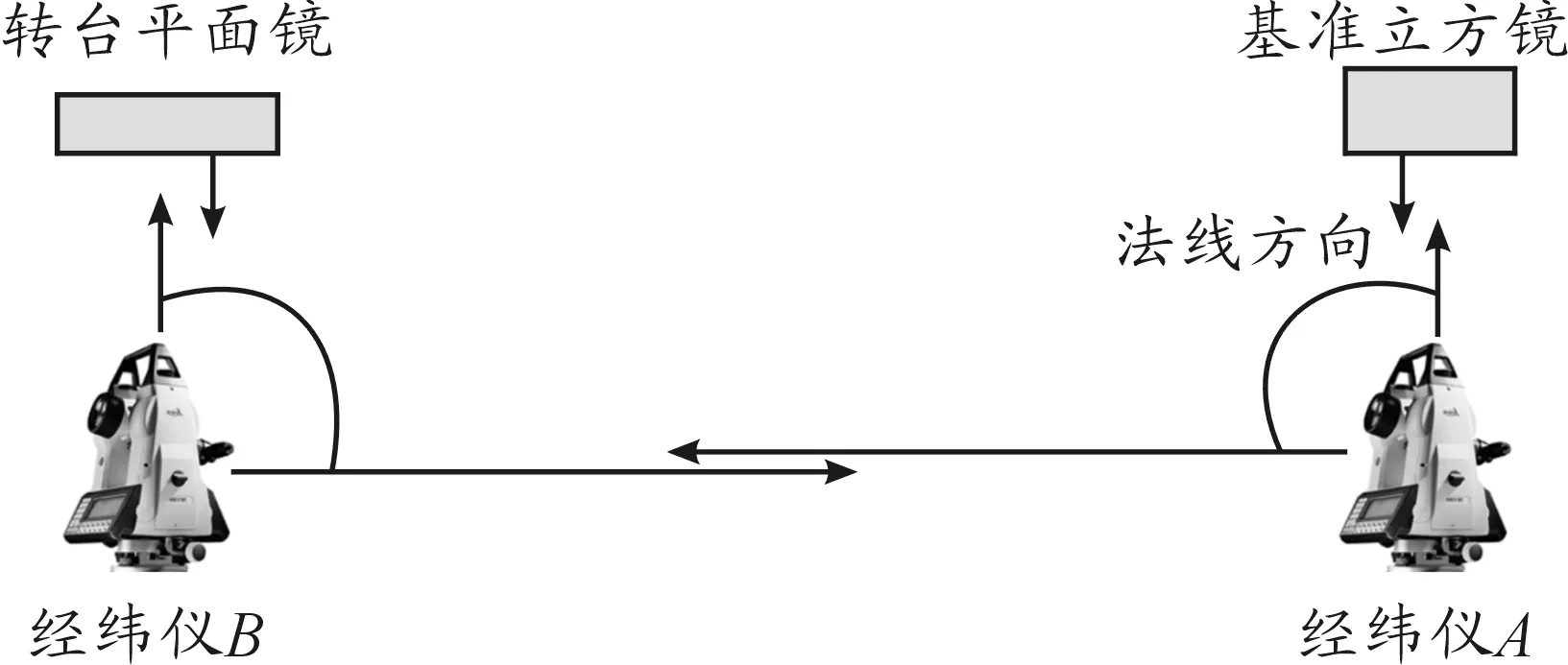
圖3 經緯儀自準直和互瞄傳遞方法示意圖
實施步驟:經緯儀A對基準立方鏡進行自準直,經緯儀B對外框平面鏡進行自準直,分別記錄兩臺經緯儀角度的讀數;經緯儀A和經緯儀B互相瞄準,進行準直,分別記錄兩臺經緯儀角度的讀數。
設基準立方鏡法線方位為An,兩臺經緯儀測量的夾角分別為α和β,則外框平面鏡的法線方位Bn為
Bn=An-α-β+180°
重復上述實施步驟,獨立測量4測回,并取4測回均值作為測量結果。最后設定外框平面鏡法線方向指向北向時,外框位置為零位。
2.2 中框尋零
考慮到內框臺面的表面平面度較高,故采用數字水平儀對中框尋零。選用的數字水平儀型號為前哨WL11型,選擇測量靈敏度檔0.001 mm/m。
實施步驟:將數字水平儀放在實驗室靜止2 h,將三軸轉臺外框旋轉到零位,中框旋轉到內框旋轉法線方向垂直指天的位置;在內框臺面外周,南、北直線上選取兩處作為測量點;用數字水平儀測量多次,并調整中框軸的旋轉角度,直到內框臺面水平,記錄此刻中框軸旋轉的角度;重復測量4次,取平均值,即完成中框的尋零。
2.3 內框尋零
內框的尋零有兩種方法:一是將三軸轉臺外、中框旋轉到零位,用加工精度很高的立方鏡放置在內框臺面上,采用外框尋零方法對內框尋零;二是做一件如圖4所示的工裝,A、B面垂直,且A面內表面和B面外表面平面度較高,固定工裝B面在內框臺面,將轉臺中框軸旋轉90°,用數字水平儀在工裝A面內表面上測量,調整內框軸的旋轉角度,直到A面水平即可,記錄此刻內框軸旋轉的角度,重復測量4次,取平均值,即完成內框的尋零。

圖4 工裝示意圖
3 測量結果
1) 北向基準方位測量結果。陀螺經緯儀對立方鏡進行自準直觀測6測回,測量結果如表1所示。對6測回測量結果取平均值,即基準立方鏡的法線方向為243°22′09″。
2) 外框尋零測量結果。采用兩臺經緯儀自準直和互瞄傳遞方法對外框尋零,測量結果如表2所示。
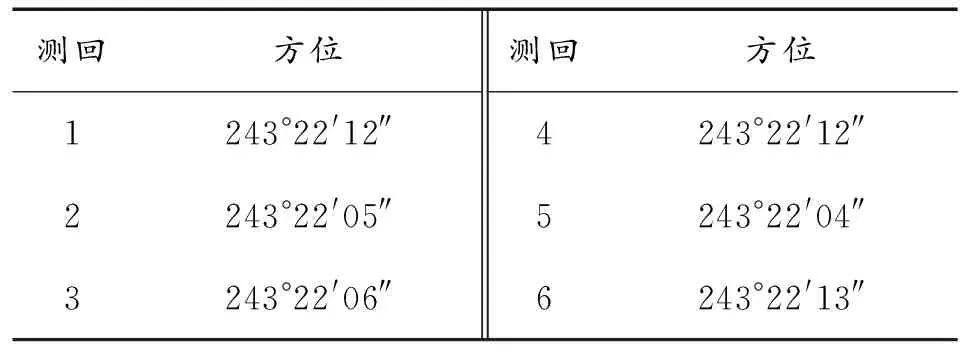
表1 北向基準方位測量結果
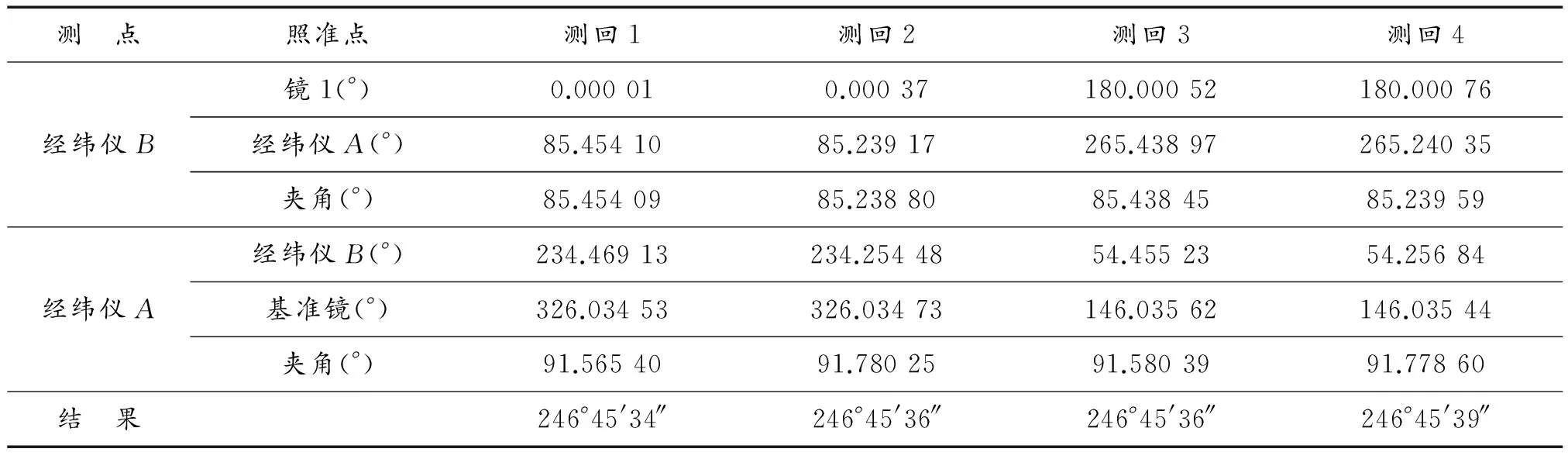
表2 外框尋零測量結果
對4測回測量結果取平均值,即外框平面鏡的法線方向為246°45′36″。
3) 中框尋零測量結果。重復4次測量,中框軸旋轉角度結果如表3所示。對4次測量結果取平均值,即中框零位為173°03′29″。
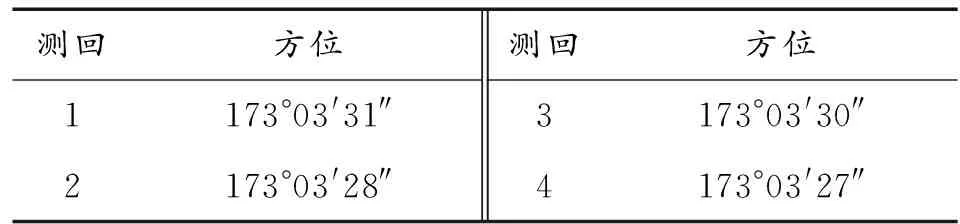
表3 中框測量結果
4) 內框尋零測量結果。重復4次測量,內框軸旋轉角度結果如表4所示。對4次測量結果取平均值,即中框零位為35°42′22″。
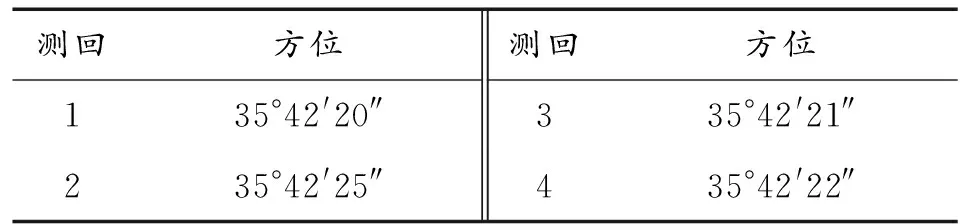
表4 內框測量結果
4 結論
捷聯式慣導系統的導航性能測試需要精確確定三軸轉臺的零位。本文詳細介紹了北向基準的建立方法,并以此北向基準對三軸轉臺外框進行了尋零;同時按照實際情況出發,采用高精度數字水平儀對中框、內框進行了尋零。經多次捷聯式慣導系統導航測試證明,此方法滿足捷聯式慣導系統導航性能測試要求,具有一定的工程應用價值。
[1] 張天光,譯.捷聯慣性導航技術[M].2版.北京:國防工業出版社,2010:299-309.
[2] 梁曉庚.空空導彈制導控制系統設計[M].北京:國防工業出版社,2006:143-172.
[3] 鄭志偉.空空導彈系統概論[M].北京:兵器工業出版社,1997(12):104-124.
[4] 于永勝,朱寶.陀螺經緯儀在北向基準檢測中的應用研究[J].宇航計測技術,2011(4):1-6.
[5] 解放軍信息工程大學地理空間信息學院.北向基準測定及測試設備方位校準成果報告[R].洛陽,2012.
[6] 蓋鵬飛.經緯儀/全站儀自準直方法[J].測繪科學技術學報,2010(6):196-199.
[7] 李廣云,郭福生.經緯儀互瞄法在短邊方位傳遞中的應用[J].解放軍測繪學院學報,1997(12):256-260.
[8] 青島前哨精密儀器有限公司.DL系列數字水平儀使用說明書[EB/OL].[2014-12-17].http://qiaoshaopic.com.
(責任編輯 楊繼森)
Applied Research of Looking Zero for Three Axis Inertial Navigation Test Turntable
CAO Yuan, LU Hao
(China Airborne Missile Academy, Luoyang 471009, China)
In order to meet the requirements of the test of strap-down inertial navigation system performance in the three-axis turntable, the initial zero position of the three-axis turntable must be determined accurately. This paper introduced the method of establishing the north reference, and elaborated the method of looking zero for the three-axis turntable. The navigation test of inertial navigation system proved that these methods satisfy the navigation test requirements.
three-axis turntable; looking zero; north reference; theodolite; digital level meter
2015-01-15
曹院(1988—),男,助理工程師,主要從事慣性技術研究。
10.11809/scbgxb2015.08.041
曹院,魯浩.三軸慣導測試轉臺尋零方法應用研究[J].四川兵工學報,2015(8):166-168.
format:CAO Yuan,LU Hao.Applied Research of Looking Zero for Three Axis Inertial Navigation Test Turntable[J].Journal of Sichuan Ordnance,2015(8):166-168.
V448
A
1006-0707(2015)08-0166-03
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
