基于單目視覺的工業(yè)機器人定位系統(tǒng)的設(shè)計
2015-04-25 01:44:32李星云李眾立廖曉波
機床與液壓 2015年9期
關(guān)鍵詞:測量
李星云,李眾立,廖曉波
(西南科技大學制造科學與工程學院,四川綿陽621010)
0 前言
視覺定位技術(shù)是機器人領(lǐng)域的一個重要研究方向[1],它綜合運用了機械學、電子學、光學、圖像處理等學科,將其應用到工業(yè)生產(chǎn)中,可以對目標尺寸和位姿進行測量,具有非接觸、速度快、柔性好等優(yōu)點,在現(xiàn)代制造行業(yè)中具有非常廣泛的應用前景。G PENG[2]介紹了視覺技術(shù)的關(guān)鍵問題,實現(xiàn)了對目標的定位。但該方法的缺點是利用單個特征點進行測量,容錯率較低;沈慧杰[3]建立了單目視覺測距的模型,但是要通過設(shè)置在場地上特征點與攝像機之間構(gòu)成三角關(guān)系后求出坐標,加大了運算量。周娜[4]建立了基于平面模板的攝像機定位方法,但為了獲得圖像間以及模板與圖像之間對應點的匹配,需要人為干預,不能實現(xiàn)實時定位。
單目視覺定位在理論上有很多的研究,但圖像處理主要是在計算機上進行,所以集成性較低,成本較高。論文從實際生產(chǎn)情況出發(fā),提出了一種在嵌入式平臺上的單目視覺定位方法,選用S3C2440 微處理器和OV3640 圖像傳感器,以工件為目標,設(shè)計出一套集成高,計算快,測量準確的單目定位系統(tǒng)。
1 單目視覺定位系統(tǒng)的組成
1.1 靜態(tài)圖像采集平臺
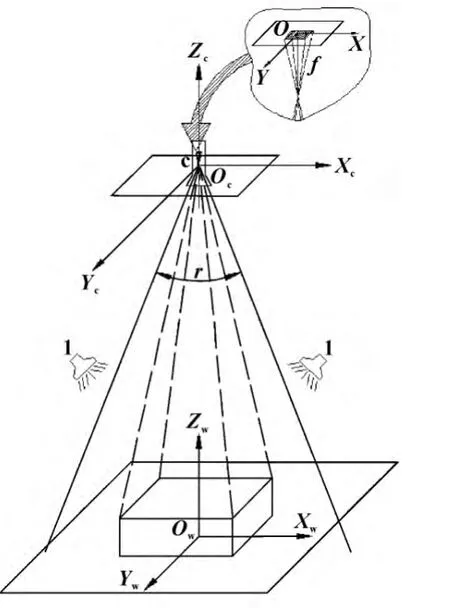
圖1 靜態(tài)圖像采集平臺結(jié)構(gòu)
為了保證目標的空間位置和姿態(tài)準確測量,測量模塊要固定在目標的正上方,并且鏡頭的光軸與地面垂直[5]。定位系統(tǒng)的靜態(tài)圖像采集平臺結(jié)構(gòu)如圖1 所示。其中f 為攝像機焦距,r 為視場角,c 為測量模塊,1 為光源。
1.2 測量模塊
為了提高測量精度和計算速度,應選擇計算速度快的微處理器以及像素高的圖像傳感器[6]
(1)微處理器的選擇
微處理器選擇的是三星公司生產(chǎn)的一款高性能、低功耗、體積小的S3C2440[7]處理芯片。由于該處理芯片有一個專用的Camera-Interface (CAMIF)接口,該接口支持YCrCb8 位的數(shù)字視頻接口標準,并且無需接口轉(zhuǎn)換電路,便可以和圖像傳感器直接連接使用。
(2)圖像傳感器的選擇
圖像傳感器選擇的是OV 公司生產(chǎn)的300W 像素的CMOS 傳感器OV3640[8]。該芯片在QXGA (2 048×1 536)格式下,處理速度高達15 幀/s,可輸出YCb-Cr422、RGB565 等多種格式,并可通過設(shè)置其內(nèi)部寄存器來控制其曝光時間、白平衡、飽和度、增益等參數(shù)。
(3)光學鏡頭的選擇
光學鏡頭須選擇固定焦距、固定視場角和景深比較大的防畸變光學鏡頭。
在測量平臺的硬件設(shè)計中,將微處理器與圖像傳感器集成在一塊電路板上,并固定在保護外殼的內(nèi)部,在保護外殼上連接光學鏡頭,構(gòu)成測量模塊,如圖2 所示。

圖2 測量模塊
1.3 系統(tǒng)的主要工作流程
視覺定位系統(tǒng)的主要硬件連接圖如圖3 所示。

圖3 視覺定位系統(tǒng)的主要硬件連接圖
首先微處理器向圖像傳感器發(fā)出采集圖像的信號,收到信號后,圖像傳感器將光學圖像轉(zhuǎn)換成電子信號,經(jīng)過信號放大處理將數(shù)據(jù)結(jié)果通過DMA 傳送到存儲單元;然后微處理器將圖像數(shù)據(jù)從儲存單元中讀取出,通過計算得到目標的空間位置和姿態(tài);最后通過通信接口將得到的數(shù)據(jù)發(fā)送到機器人控制器去控制機器人運動。
2 單目視覺定位系統(tǒng)的算法設(shè)計
單目視覺定位原理是利用一個攝像機獲取目標圖片,然后將圖像空間中的目標信息通過相關(guān)算法,轉(zhuǎn)化成真實空間中的目標信息[9]。在該系統(tǒng)中,將得到的圖像坐標(u,v)通過相關(guān)算法,計算出目標的空間位置與姿態(tài)。
2.1 定位系統(tǒng)中各坐標系的定義與關(guān)系
(1)成像平面坐標系
如圖4 所示,O-XY 為成像平面坐標系,其中點O 是鏡頭光軸與成像平面的交點,位于圖像中心。XY 平面與地面平行。
(2)圖像坐標系
如圖4 所示,o-uv 為圖像坐標系,由于圖像信息儲存在矩陣中,所以其坐標(u,v)表示圖像中各像素點的行數(shù)和列數(shù),其原點o 位于圖像的左上角。u 軸和v 軸分別平行于成像平面坐標系的X 軸和Y 軸。
(3)攝像機坐標系
如圖4 所示,Oc-XcYcZc為攝像機坐標系,其中點Oc為鏡頭的光心,Xc軸和Yc軸與成像平面坐標系的X 軸與Y 軸平行,Zc軸為鏡頭的光軸,與成像平面垂直。
(4)世界坐標系圖
如圖4 所示,Ow-XwYwZw為世界坐標系,用來描述目標的空間位置,為了提高運算速度,此系統(tǒng)定義的世界坐標系的原點Ow為鏡頭光軸與地面的交點,XwYw平面與地面重合。
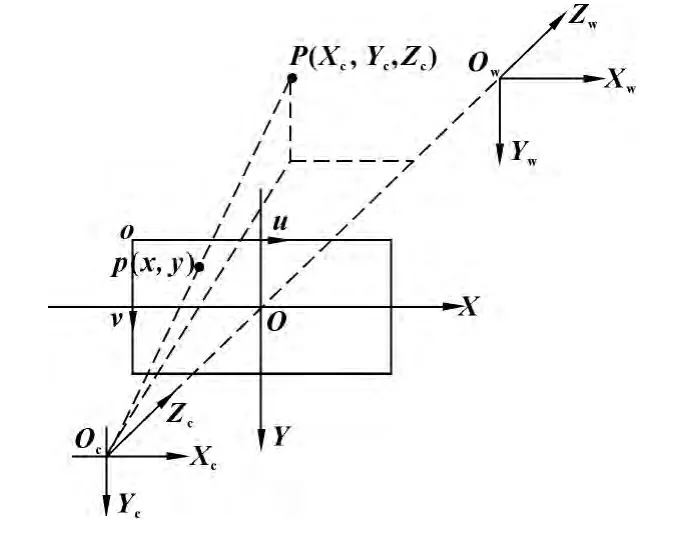
圖4 定位系統(tǒng)坐標系
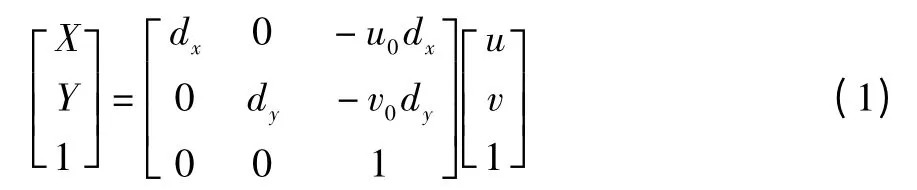
2.2 圖像坐標系與成像平面坐標系的轉(zhuǎn)化
在圖像坐標中,像素點坐標(u,v)為該像素在數(shù)組中的位置,并非實際的物理坐標值,所以需要轉(zhuǎn)換到成像平面坐標系中。已知圖像中心的坐標為(uo,vo)和一個像素點的尺寸為dx、dy,通過坐標系之間的關(guān)系可得其轉(zhuǎn)化公式為:
2.3 三維空間坐標的計算
由各坐標系之間的幾何關(guān)系可知:點O 為鏡頭的光心,Xc軸和Yc軸與成像平面的X 軸和Y 軸平行,Zc軸為鏡頭的光軸,它與成像平面垂直,其交點即為成像平面的坐標原點O。OOc為攝像機的焦距f。根據(jù)圖4 中的各坐標系關(guān)系,可以得到成像平面坐標系與攝像機坐標系之間的轉(zhuǎn)換公式:

通過齊次坐標轉(zhuǎn)換公式,可以得到攝像機坐標系與世界坐標系的轉(zhuǎn)換公式:
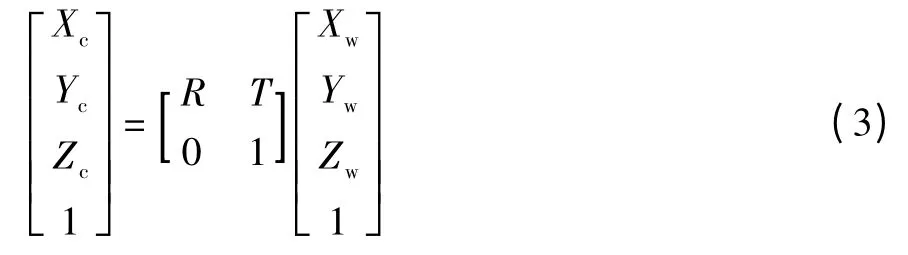
由于定義的世界坐標系的原點Ow為鏡頭光軸與地面的交點,且攝像機坐標系和世界坐標系沒有相對旋轉(zhuǎn),只在Zc軸正方向進行平移,距離為a,所以可以得到R 為3 ×3 的單位矩陣,T 為[0,0,a]T,聯(lián)立(1)(2)(3)3 個公式,可以得到公式:
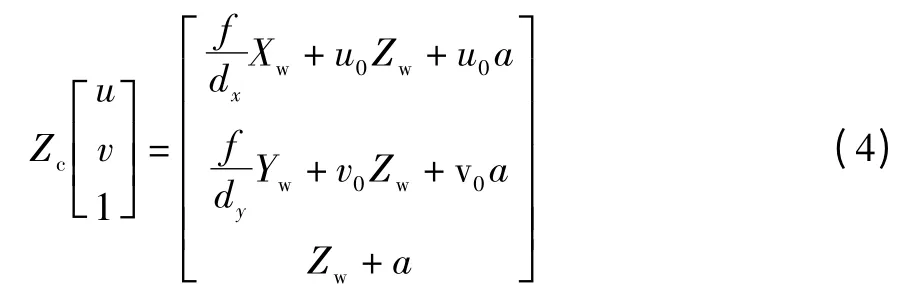
從公式(4)可以看出,只要求出Zc的坐標值,世界坐標(Xw,Yw,Zw)即可求出。
由于已知圖像傳感器的像素陣列為m ×n、靶面長度和寬度為Lu與Lv以及目標的長度和寬度為Lx與Ly,并且通過圖像處理可以得出目標長邊和寬邊的像素點個數(shù)分別lx和ly,通過圖像空間與真實空間的轉(zhuǎn)化關(guān)系,可以得到公式:

為了減少誤差,可以通過公式(5)(6)分別求出Zc的值,取其平均值,然后將得到的結(jié)果代入公式(4),即可求出目標的空間坐標。
2.4 目標姿態(tài)的測量
目標的姿態(tài)測量主要是計算目標中心線與Xw軸正方向之間的夾角來確定的。經(jīng)過圖像處理,已知目標兩條平行長邊上像素點的坐標(u,v),因此可以通過計算出對應像素點坐標的斜率來確定其夾角角度。為了縮短計算時間以及減少誤差,通過反復的測試,決定每條長邊取相同間距的10 個像素點。

3 單目視覺定位系統(tǒng)的軟件設(shè)計
3.1 圖像分量的選擇以及選擇依據(jù)
定位系統(tǒng)采用的圖像數(shù)據(jù)格式是YCbCr422,其中Y 表示明亮度,而Cb和Cr表示色度,其作用是描述圖像色彩及飽和度,用于指定像素的顏色。在該格式下,每個像素點保存一個Y 值,每2 個像素點保存一個Cb和Cr值。由圖像處理原理可知,圖像的像素點越多,識別與計算精度越高。所以選擇Y 分量圖像來進行二值化處理和計算。
3.2 圖像的二值化處理與目標的邊緣提取
目標Y 分量的灰度圖像及其直方圖和閥值分隔后的二值化圖像如圖5 所示。

圖5 Y 分量圖像及其直方圖和分割后二值化圖像
如圖5 (a)為目標Y 分量的灰度圖像,5 (b)為其灰度直方圖,通過灰度直方圖可以看出,目標與非目標之間的灰度峰值有較大的間隔,可以較好地提取出目標特征(因此盡量提高目標與非目標之間亮度差),通過閾值分割,得到二值化圖像,如圖5 (c)所示,并在二值圖像中,通過邊緣連接法[10]求出目標邊界像素點。
3.3 軟件系統(tǒng)的處理流程
該視覺定位系統(tǒng)圖像處理的主要流程是:首先進行系統(tǒng)初始化,其次采集目標圖像并對圖像Y分量進行二值化處理,然后通過二值化圖像,得到目標邊緣像素點,最后通過目標邊緣的像素點,確定目標的空間位置和姿態(tài)。圖像處理的軟件流程圖如圖6所示。
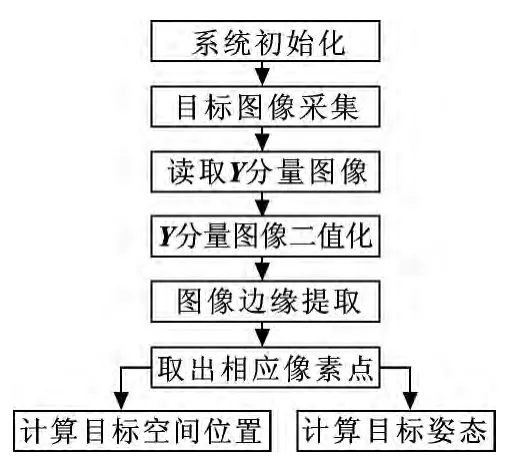
圖6 圖像處理的軟件流程圖
4 系統(tǒng)的測試及誤差分析
為了保證空間位置和姿態(tài)計算的準確性,應該注意以下幾點:
(1)鏡頭的光心盡量是成像平面坐標系的原點,若偏差較小,則需要調(diào)整(u0,v0)的坐標值,如果偏差較大,必須進行校正。
(2)圖像傳感器的靶面尺寸必須和光學鏡頭的靶面尺相同,若圖像傳感器的靶面尺寸大于光學鏡頭的靶面,則采集到圖像周圍會有黑影,若小于,則采集圖像的會出現(xiàn)邊緣缺失。
(3)如果作業(yè)現(xiàn)場環(huán)境光線變化很大,會影響二值化圖像的閾值選取,從而影響計算出的位姿信息。所以在光線變化很大的環(huán)境中,應該采用自適應閾值提取法[11]。
在數(shù)據(jù)采集的過程中,分別讓采集模塊在不同高度對目標圖像進行采集,以判斷不同高度下的系統(tǒng)誤差,采集到的數(shù)據(jù)如表1 所示。

表1 不同高度下的圖像采集數(shù)據(jù)
通過表1 的數(shù)據(jù)可計算出目標上表面中心的世界坐標,結(jié)果如表2 所示。
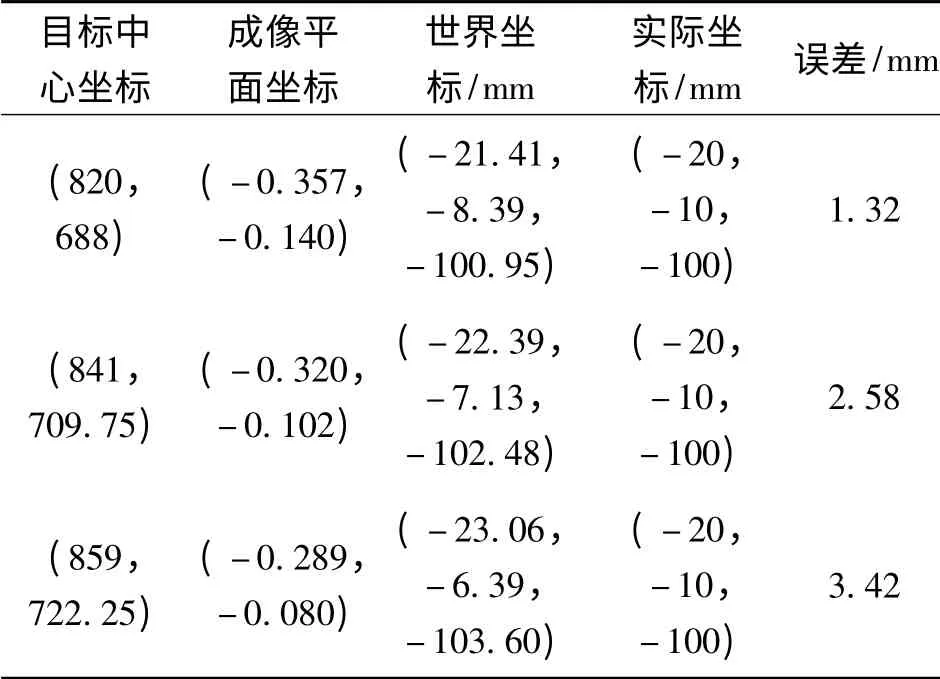
表2 不同高度下的圖像處理結(jié)果
在對目標姿態(tài)的測量過程中,分別選擇了0°,15°,30°,45° 4 種角度,計算結(jié)果如表3 所示。
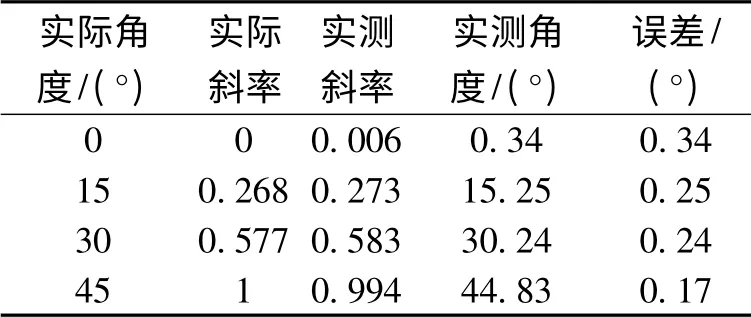
表3 不同角度的圖像處理結(jié)果
通過表1、表2 可知,測量模塊分別距地面為1 600、1 850、2 100 mm 時,系統(tǒng)測量誤差均小于5 mm,通過表3 可知,在不同偏移角度下,測量誤差小于0.5°。通過以上數(shù)據(jù)可知,目標空間位置與姿態(tài)測量的誤差均在操作允許的范圍內(nèi),因此該單目視覺定位系統(tǒng)是可行的。
5 結(jié)論
通過選用S3C2440 與OV3640 的硬件配置,提出了一種處理簡單、計算準確的單目視覺定位系統(tǒng)。將該系統(tǒng)應用在工業(yè)機器人上,可以準確地獲取工件目標的位置和姿態(tài)的信息,從而降低了工人的勞動強度,提高了工作效率。隨著微處理器與圖像傳感器性能的不斷增強,測量精度也會不斷提高,因此具有很高的推廣價值。
[1]倪受東,劉洋,袁祖強.機器人視覺伺服綜述[J].機床與液壓,2007,35(9):1-5.
[2]PENG G,HUANG X H,GA0 J,et al .Vision Based Intelligent Control for Mobile Robot[C]//Intelligent Control and Automation,2006.WCICA 2006.The Sixth World Congress,2006,2:9124-9128.
[3]沈慧杰.基于單目視覺的攝像機定位方法的研究[D].長春:吉林大學,2009.
[4]周娜.基于單目視覺的攝像機定位技術(shù)研究[D].南京:南京航空航天大學,2007.
[5]曹毓,馮瑩,趙立雙.相機姿態(tài)安裝誤差對單目視覺定位精度的影響[J].傳感器與微系統(tǒng),2012,31(12):23-26.
[6]彭章君,廖曉波,羅亮,等.拉鉚釘多參數(shù)高精度在線檢測系統(tǒng)的設(shè)計[J].計算機測量與控制,2011,19(2):260-265.
[7]Samsung Electronics.S3C2440 user's manual[M].Republic of Korea,2004.
[8]OmniVision Technologies.OV3640 user's manual [M].2006.
[9]廖曉波,李眾立,廖璇.磚窯卸垛機器人視覺定位系統(tǒng)研究[J].控制工程,2013,20(4):650-653.
[10]鄒柏賢,林京壤.圖像輪廓提取方法研究[J].計算機工程與應用,2008,44(25):1-4.
[11]郭佳.基于光照不均勻圖像的自適應二值化方法研究[D].武漢:武漢科技大學,2013.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
