3-RPC型并聯機器人模糊滑模軌跡跟蹤控制研究
2015-04-25 01:44:26劉運鴻安梓銘李雅瓊朱大昌
機床與液壓 2015年9期
劉運鴻,安梓銘,李雅瓊,朱大昌
(江西玖發新能源汽車有限公司,江西贛州341000)
0 前言
并聯機器人在很多領域都有廣泛的應用,也發揮重要作用,如在武器系統、醫學上等,但并聯機器人機構系統復雜,有非線性、強耦合的特點,導致要對其進行控制就更困難,而且控制精度也不高,這給生產應用帶來了很多不便[1-2]。人們對并聯機器人控制的研究時間并不長,不透徹。為讓其在工業化發展中發揮重要作用,必須加強對并聯機器人的控制策略的研究[3-4]。滑模變結構控制在并聯機器人中比較廣泛,在并聯機器人中很難有精確的數學模型,而滑模變結構可以不需要精確的數學模型,只要參數的變化幅值,加上滑模變結構控制對外界的干擾不那么敏感,并且滑模變結構控制不必要做專門解耦來解決內部耦合,其本身的設計過程就可以解耦。這樣通過滑模變結構控制就可以很好地對并聯機器人實現控制[5-6]。變結構與其他控制方式相結合控制效果會更佳[7-8]。
滑模變結構控制與傳統的控制系統相比,控制簡單,對數學模型的精確性要求不高,對外部干擾和參數變化有好的魯棒性和完全的自適應性,并有降階、解耦、動態性能好等優點[9-10]。機器人是典型的非線性系統,存在各種不可預見的外部干擾,滑模變結構控制能比較有效地應用于機器人控制中[11-12]。
本文作者設計了模糊自適應滑模變結構控制器,在Matlab 仿真軟件進行仿真,得出仿真結果,通過結果分析可以證明模糊滑模變結構的控制精度更高,能更有效削弱抖振現象。
1 并聯機器人軌跡規劃
1.1 并聯機器人運動學反解
3-RPC 并聯機器人機構如圖1 所示,其上(動)平臺、下 (定)平臺都為三角形,動,定平臺由3 個支鏈連接構成,3 條支鏈的結構相同,即都為RPC 支鏈。每條支鏈中圓柱副軸線平行于定平臺的一條邊,轉動副軸線平行于圓柱副軸線,且移動副軸線垂直相交于圓柱副和轉動副軸線。3 條支鏈繞Z 軸呈120°對稱分布。
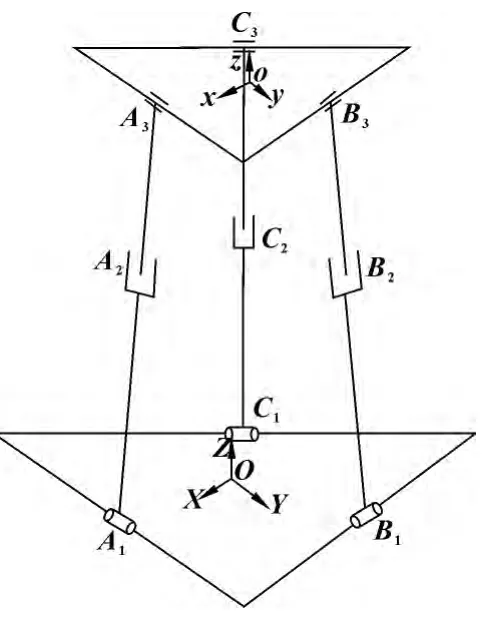
圖1 3-RPC 并聯機構
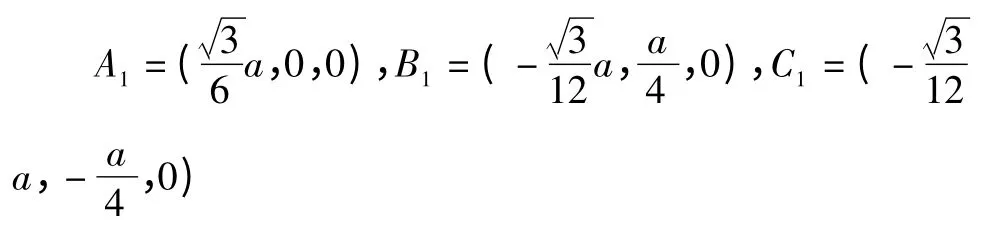
如圖1 可知,定平臺各點的坐標為:
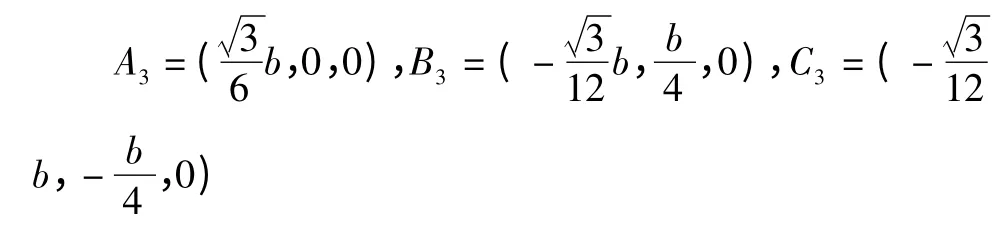
動平臺各點坐標為:
由螺旋理論可得3-RPC 并聯機構只做三維平動,所以該機構的歐拉角都為零,即α=β=λ=0;可知,R 的旋轉矩陣為:
由機構的幾何矢量關系,每組平行桿的矢量式可以表示為由并聯機構的幾何矢量關系,如圖2 所示,每組平行桿的矢量式li可以表示為:

其中:ci是動平臺上中點在動坐標系中的矢量,Ci在靜坐標系中的矢量,P 為動平臺原點在靜坐標系中的矢量,R 為動平臺姿態的方向余弦矩陣。由上式可得:
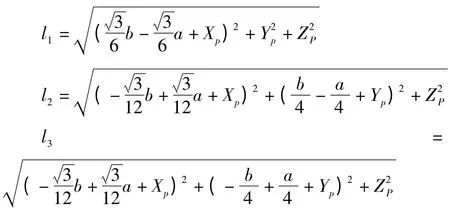
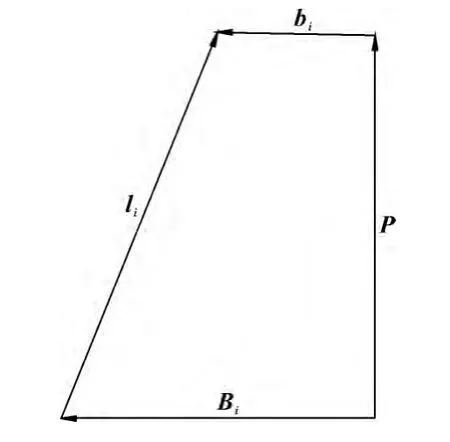
圖2 機構的幾何矢量關系
1.2 軌跡規劃
機器人要完成規定的動作,則要對其進行相應的軌跡規劃。而并聯機器人結構相對復雜,工作空間表達相對困難,并有不確定性,所以對軌跡規劃增加了很大的難度。因此,利用并聯機器人運動學反解相對簡單的特點,對其進行軌跡規劃相對簡單。所以采用運動反解做驅動位移軌跡跟蹤。
2 滑模控制律的設計
設機器人的動態方程為

其中:q∈Rn為轉動角度向量,M(q)為n ×n 維正定慣性矩陣,Vm(q)為n ×n 維向心哥氏力矩,G(q)為n×1 維慣性矩陣,τ∈Rn為各個支鏈的轉矩向量,即控制輸入。
機器人動力學系統具有如下動力學特性:
(1)慣性矩陣M(q)是對稱正定陣且有界;
(2)M(q)-2C(q,q·)是一個斜對稱矩陣,即對任意向量x,有:

(3)重力項滿足G(q)≤gb,gb為q 的函數。
2.1 傳統滑模控制設計
定義跟蹤誤差為:

定義誤差函數為:

其中:λ=diag [λ1,…,λi,…,λn],λi>0。
定義

設計控制律為:

將式(6)代入式(1)得:

假設

2.2 模糊自適應控制律設計
采用模糊系統可以實現對任意連續函數的精確逼近。因此,可以用模糊系統自適應逼近控制的增益對其進行控制研究。運用乘積推理機,單值模糊器和中心平均解模糊器來設計模糊系統,用于表示模糊集的隸屬函數設計為:

模糊系統的輸出為:
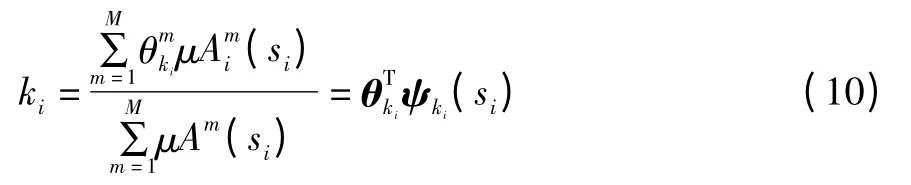
其中
M 為模糊規則數量。
對模糊增益調整的控制律設計為

其中K= [k1,…,ki,…,kn],ki為第i 個模糊系統的輸出。
將式(11)代入到式(1)得:


自適應律取為:

3 3-RPC 并聯機器人數學模型
3-RPC 并聯機器人三支路通道具有相似性,選擇一條支路作為研究對象。單條支路的數學模型:

式中:J =L(Ja+Jm+i2J0),B =R(Ja+Jm+i2J0)+L(Bm+i2B0),W = R(Bm+ i2B0)+ KcKb。Kc是電動機轉矩常數,J0是可以通過試驗或機構分析確定的標稱負載轉動慣量;B0是可以通過試驗或機構分析確定的標稱負載阻力系數;Ja是轉子的轉動慣量;Jm是減速裝置驅動邊的轉動慣量;i 是減速裝置的速比;Bm是驅動側的阻力系數;Kb是電機的反電勢常數;L 是電樞的電感;R 是電樞的電阻。
4 系統仿真模型及結果
直流伺服電機以及伺服驅動器參相關參數:額定轉矩為0.25 N·m,空載轉速4 300 r/min,Kc=0.074 N·M/A,R =1.11 Ω,L =1.1 mH,Ja=3.11×10-5kg·m2,ⅠN=2.95 A,Kb=0.1 V (rad/s),Jm=0.002 7 kg·m2,Bm=0.003 7,i =40。將這些參數代入式(15)得

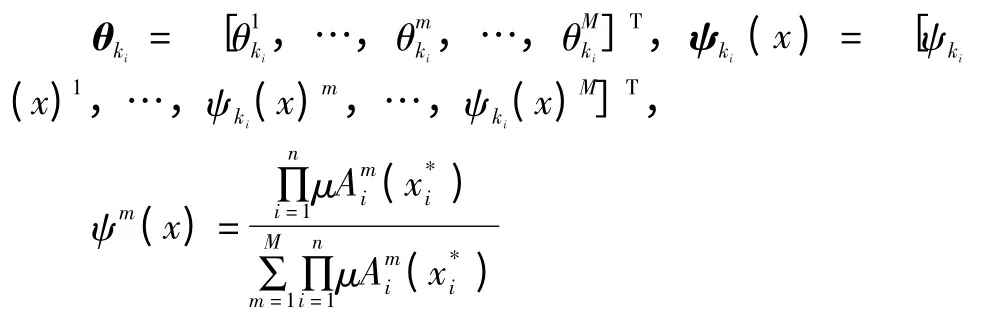
根據3-RPC 機器人運動要求,設計出模糊自適應增益滑模控制,如圖3 中有3 個S-Function 函數,第一個S-Function 函數是該系統運動的期望軌跡,其函數為3-RPC 型并聯機器人機構的運動學反解函數。第二個S-Function 函數為所設計的控制器,即模糊自適應增益滑模變結構控制器。第三個S-Function 函數為控制支路的數學模型。文中采用ode45,取系統仿真步長0.001 s。應用計算機通過對并聯機器人模糊自適應增益滑模變結構控制仿真,可到得傳統滑模變結構控制軌跡跟蹤圖,如圖4,5 所示。
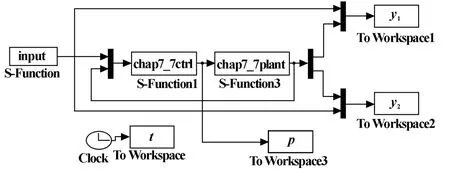
圖3 系統仿真模型
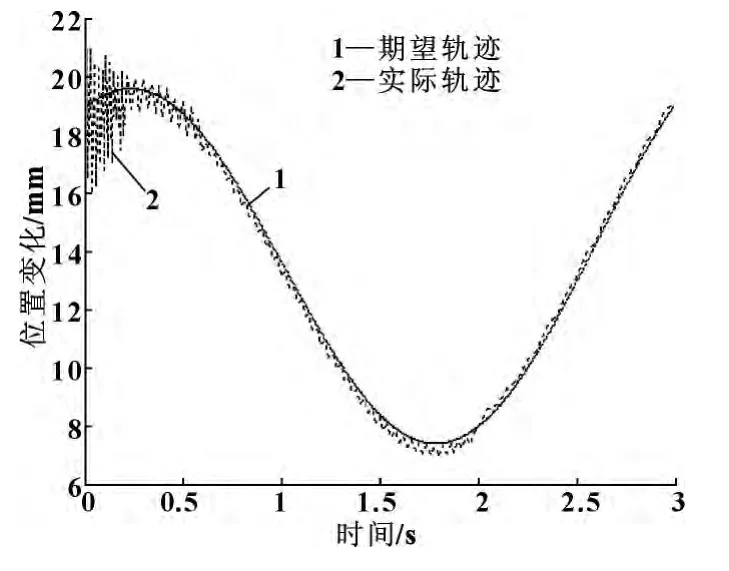
圖4 傳統滑模控制的的軌跡跟蹤

圖5 模糊自適應增益滑模控制的軌跡跟蹤
從圖4 分析可知道,傳統變結構控制在軌跡跟蹤中有較高精度的軌跡跟蹤。系統響應速度也比較快,在剛開始運行時控制系統就能立刻跟蹤反應,控制運行相對平穩,當運行大約0. 6s時就能達到理想的跟蹤效果。從圖5 分析可知道,模糊自適應增益滑模控制軌跡跟蹤中有更高精度的軌跡跟蹤,系統響應速度也很快,在剛開始運行時控制系統就能立刻跟蹤反應,控制運行相對平穩,當運行大約0.4 s 時能與期望軌跡相重合,說明達到了理想的跟蹤效果。由上述仿真結果表明模糊自適應增益滑模控制要優于傳統變結構控制,同時響應速度也更快,響應時間也更短。且都能達到對3-RPC 并聯機器人的軌跡跟蹤控制要求。
5 結束語
應用計算機Matlab 軟件建模,對3-RPC 型并聯機器人進行控制仿真分析。其仿真結果表明:傳統滑模控制的跟蹤精度不高,響應時間相對長,并在控制過程中出現抖振現象;通過比對分析可得出增益模糊控制可以明顯消弱控制系統的抖振現象,響應時間明顯更快。
[1]常興,劉安心,房立豐,等.一種三維移動并聯機器人機構及其運動學分析[J].機械傳動,2012,36(6):25-28.
[2]莫賢.基于螺旋理論的3_PRS 并聯機構的運動學建模及仿真[D].揚州:揚州大學.2009.
[3]劉奇帥,楊熙,杜翠國,等.利用遺傳算法優化的神經網絡求解并聯機構位置正解[J].煤礦機械,2013,34(2):11-12.
[4]宗朝.不確定二自由度冗余并聯機器人控制方法研究[D].南京:南京理工大學,2013.
[5]劉延斌,韓秀英,趙新華.3-RRRT 并聯機器人解耦控制[J].哈爾濱工業大學學報,2009,41(12):247-249.
[6]朱彩紅.2-DOF 并聯機器人控制研究[D].鎮江:江蘇大學,2007.
[7]KIM S M,HAN W Y,KINM SJ.Design if a New Adaptive Sliding Mode Observer for Sensorless Induction Motor Drive[J].Electric Power Systems Research,2004,70:16-22.
[8]高國琴,丁琴琴,王威.RBF 神經網絡滑模變結構控制在并聯機器人中的應用[J].工業儀表與自動化裝置,2012,42(2):35-39.
[9]叢爽,王楊,尚偉偉.自適應控制策略在并聯機構上的應用[J].制造業自動化,2007,29(7):45-49.
[10]MUNOZ D,SBARBARO D.An Adaptive Sliding-mode Controller for Discrete Nonlinear Systems[J].IEEE Transactions on Industrial Electronics,2000,47(3):574-581.
[11]董超君,高國琴,寧珍珍.并聯機器人的智能模糊滑模控制算法[J].機械設計與制造,2008,7(7):150-152.
[12]劉金琨.機器人控制系統的設計與MATLAB 仿真[M].北京:清華大學出版社,2008.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
