負(fù)載敏感閥前補(bǔ)償系統(tǒng)原理分析
2015-04-16 09:07:53燕山大學(xué)河北省重型機(jī)械流體動力傳輸與控制重點(diǎn)實(shí)驗(yàn)室河北秦皇島066004燕山大學(xué)先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室河北秦皇島066004
液壓與氣動 2015年7期
關(guān)鍵詞:系統(tǒng)
, , , (1.燕山大學(xué) 河北省重型機(jī)械流體動力傳輸與控制重點(diǎn)實(shí)驗(yàn)室, 河北 秦皇島 066004;2.燕山大學(xué) 先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室, 河北 秦皇島 066004)
引言
負(fù)載敏感技術(shù)在工程機(jī)械領(lǐng)域應(yīng)用十分廣泛,其顯著特點(diǎn)是將負(fù)載所需要的壓力流量與泵源所提供的壓力流量匹配起來,消除溢流損失,從而降低能耗,提高系統(tǒng)效率[1]。依據(jù)流量調(diào)節(jié)方式不同,工程機(jī)械中負(fù)載敏感系統(tǒng)分為開中心負(fù)載敏感系統(tǒng)與閉中心負(fù)載敏感系統(tǒng)[2],隨著負(fù)載敏感泵技術(shù)的發(fā)展,閉中心負(fù)載敏感系統(tǒng)以其出色的節(jié)能效果,得到越來越多的應(yīng)用。依據(jù)壓力補(bǔ)償閥在回路中位置的不同,可將負(fù)載敏感系統(tǒng)分為閥前補(bǔ)償?shù)膫鹘y(tǒng)負(fù)載敏感系統(tǒng)(Ls)和閥后補(bǔ)償?shù)呢?fù)載獨(dú)立流量分配系統(tǒng)(LUDV)[3],其中閥后補(bǔ)償系統(tǒng)在流量分配方面不存在流量飽和問題,因此在協(xié)調(diào)性要求較高的工況條件下較前者有一定的優(yōu)勢。
閥前補(bǔ)償負(fù)載敏感系統(tǒng)在實(shí)際工程中也存在大量應(yīng)用,而系統(tǒng)參數(shù)的調(diào)整及流量飽和現(xiàn)象一直受到國內(nèi)外學(xué)者和工程師的關(guān)注。李現(xiàn)友、黃宗益等[4,5]對負(fù)載敏感系統(tǒng)進(jìn)行了原理性分析;Duqiang WU[6]采用傳遞函數(shù)方法對負(fù)載敏感系統(tǒng)(Ls)進(jìn)行分析,并對負(fù)載敏感系統(tǒng)穩(wěn)定性進(jìn)行了深入研究,但采用復(fù)雜的頻域數(shù)學(xué)模型,很難給現(xiàn)場的工程師直觀的理解;高峰等[7]以非線性方程組形式建立負(fù)流量控制模型,采用PID控制策略,得到了較好的控制效果;肖前龍等[8]利用計(jì)算機(jī)仿真對負(fù)載敏感閥前補(bǔ)償進(jìn)行研究,討論了補(bǔ)償閥預(yù)緊力及彈簧剛度等參數(shù)對系統(tǒng)流量壓力的影響,然而計(jì)算機(jī)仿真靈活性較差,且進(jìn)行優(yōu)化設(shè)計(jì)時仿真計(jì)算時間較長。
為解決以上研究中存在的數(shù)學(xué)模型復(fù)雜和計(jì)算耗時較長的問題,本研究以閥前補(bǔ)償負(fù)載敏感系統(tǒng)為研究對象,通過簡化的非線性方程組建立負(fù)載敏感閥的穩(wěn)態(tài)數(shù)學(xué)模型,闡述負(fù)載敏感系統(tǒng)反饋控制原理,并對流量飽和現(xiàn)象進(jìn)行分析。
1 負(fù)載敏感閥流量壓力關(guān)系
閥前補(bǔ)償負(fù)載敏感多路閥單聯(lián)主要由補(bǔ)償閥及主控制閥串聯(lián)構(gòu)成[9],其結(jié)構(gòu)如圖1所示。負(fù)載敏感系統(tǒng)在實(shí)際應(yīng)用中可簡化為圖2所示系統(tǒng)。主控制閥可簡化成節(jié)流閥;補(bǔ)償閥功能上屬于定差減壓閥,作用是穩(wěn)定主閥前后壓差,使其不隨負(fù)載壓力變化而變化。
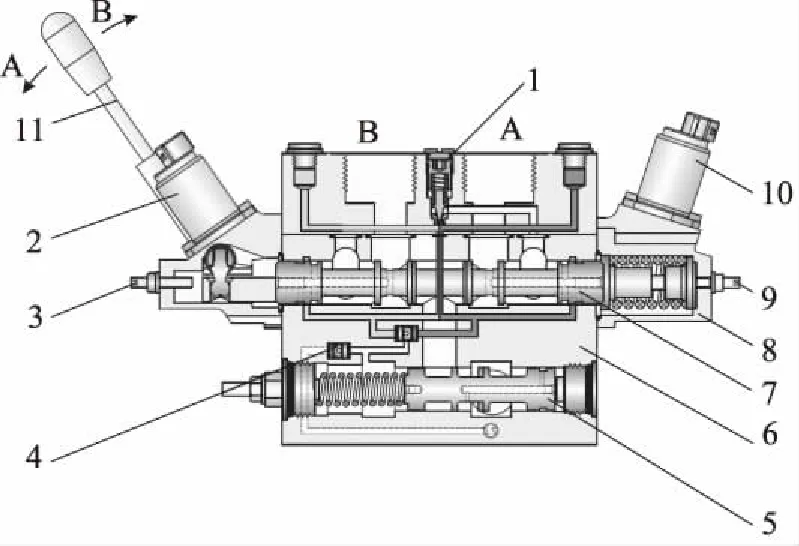
1.二級Ls壓力設(shè)定閥 2.電磁鐵A 3.B口行程限制 4.主閥芯 5.壓力補(bǔ)償閥 6.閥體 7.主閥芯 8.彈簧罩 9.A口行程限制 10.電磁鐵B 11.機(jī)械手柄
在圖2所示負(fù)載敏感回路中,設(shè)負(fù)載壓力為p2,補(bǔ)償閥出口壓力為p1,泵出口壓力為p0。
主閥的流量壓力關(guān)系為:
其中:Cd—— 流量系數(shù),無因次
A2—— 主閥節(jié)流面積,m2
ρ—— 流體密度,kg/m3
Q—— 流量,m3/s
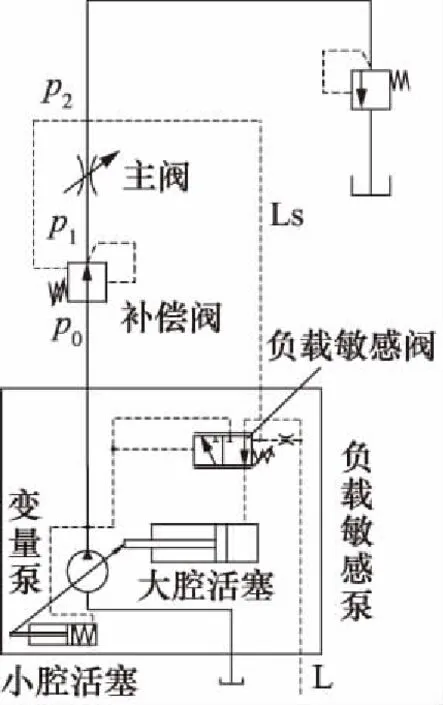
圖2 閥前補(bǔ)償負(fù)載敏感系統(tǒng)原理
補(bǔ)償閥的流量壓力關(guān)系為:
其中:A1—— 補(bǔ)償閥節(jié)流面積,m2
由式(1)、式(2)可得:
(3)

圖3 補(bǔ)償閥閥桿受力示意圖
設(shè)x為補(bǔ)償閥閥口開度,x0為閥桿零位移開度,彈簧剛度為k,預(yù)緊力為F0,閥桿作用面積A0。當(dāng)補(bǔ)償閥芯與右端蓋接觸時(F0>(p1-p2)A0):
x=x0
(4)
當(dāng)補(bǔ)償閥芯與右端蓋脫離(F0≤(p1-p2)A0)時,忽略液動力、粘滯阻力及閥桿慣性力,可得閥桿受力平衡方程:
(p1-p2)A0=F0+k(x0-x)
(5)
A1=xw1
(6)
其中,w1為補(bǔ)償閥口面積梯度,取決于閥口形式。
則補(bǔ)償閥閥口節(jié)流面積A1可表示為:
(7)
當(dāng)補(bǔ)償閥芯與右端蓋脫離時,將式(5)、式(6)代入式(3)得到:
為了便于分析,定義:

(9)

綜合以上分析,結(jié)合表1所示參數(shù)可得到負(fù)載敏感閥壓力流量曲線及補(bǔ)償閥口開度流量變化曲線,如圖4所示。
表1 主要參數(shù)取值
圖4所示曲線可大致分為三段:
第一階段(圖中A段):這一階段閥口處于全開位置,通過流量較小,補(bǔ)償閥壓降較小;
第二階段(圖中B段):補(bǔ)償閥與主閥壓降相當(dāng),正常工作時主要處于這一區(qū)域;
第三階段(圖中C段):隨著流量加大,壓差急劇增大,達(dá)到極限流量時,壓差趨于無窮。

圖4 負(fù)載敏感多路閥流量壓力曲線、流量補(bǔ)償閥口開度曲線
(10)
式(10)表明了預(yù)壓縮力F0、補(bǔ)償閥初始開度x0、主閥口節(jié)流面積與通流能力之間的關(guān)系,當(dāng)主閥口節(jié)流面積A2變化時,負(fù)載敏感多路閥流量壓力曲線變化趨勢如圖5所示。
圖5 負(fù)載敏感多路閥流量壓力曲線隨主閥開度變化趨勢
由式(10)及圖5可知:
(1) 負(fù)載敏感閥通流能力與主閥口節(jié)流面積A2成正比且與負(fù)載無關(guān),這是調(diào)節(jié)系統(tǒng)流量的主要方式;
(2) 調(diào)試人員可根據(jù)負(fù)載速度要求調(diào)節(jié)補(bǔ)償閥彈簧預(yù)壓縮量,式(10)的提出同時為閥芯主彈簧設(shè)計(jì)提供了依據(jù)。
2 負(fù)載敏感系統(tǒng)工況分析
2.1 負(fù)載敏感系統(tǒng)工作原理分析
依據(jù)圖2所示的原理圖可知,閥前補(bǔ)償負(fù)載敏感系統(tǒng)主要由負(fù)載敏感泵、負(fù)載敏感多路閥及負(fù)載組成。典型的負(fù)載敏感泵由泵內(nèi)負(fù)載敏感閥、大腔活塞、變量泵及小腔活塞構(gòu)成[4]。負(fù)載敏感系統(tǒng)中,泵內(nèi)負(fù)載敏感閥有彈簧的一側(cè)通過Ls作用負(fù)載壓力p2,另一端作用泵出口壓力p0。當(dāng)壓差p0-p2減小時,泵內(nèi)負(fù)載敏感閥右位工作,大腔活塞作用壓力降低,在小腔活塞作用下變量泵斜盤傾角增大,泵排量隨之增大;反之泵排量減小。負(fù)載敏感泵檢測負(fù)載敏感多路閥前后壓差,當(dāng)壓差大于某一設(shè)定值時泵排量減小;而壓差小于該值時排量增大。
結(jié)合圖4中負(fù)載敏感多路閥流量壓力曲線可知,負(fù)載敏感系統(tǒng)的工作原理為:檢測壓差p0-p2,若p0-p2未達(dá)到指定值(設(shè)為Δp)則增加排量,輸入流量隨之增加,p0-p2亦隨之增大;若泵排量增至最大p0-p2仍未達(dá)到Δp,泵處于飽和狀態(tài);若排量增大過程中p0-p2達(dá)到Δp,則排量不再增加,若某時刻p0-p2>Δp則排量減小,最終使p0-p2穩(wěn)定在Δp附近。
負(fù)載敏感泵與負(fù)載敏感閥構(gòu)成了一個負(fù)反饋的控制關(guān)系,負(fù)載敏感閥通過調(diào)節(jié)前后壓差對負(fù)載敏感泵進(jìn)行控制。泵源輸出的流量完全與控制閥所要求的流量相匹配,由此,負(fù)載敏感系統(tǒng)完全消除了溢流損失,回路效率得到提高。
2.2 負(fù)載敏感系統(tǒng)中的飽和現(xiàn)象
當(dāng)多路閥兩聯(lián)或多聯(lián)聯(lián)動時,負(fù)載敏感系統(tǒng)可能會出現(xiàn)流量飽和現(xiàn)象。飽和現(xiàn)象是指:負(fù)載敏感系統(tǒng)多聯(lián)聯(lián)動時,受變量泵最大流量限制,不能同時滿足各聯(lián)流量需求,出現(xiàn)小負(fù)載流量充足,而大負(fù)載流量不足的現(xiàn)象。
建立如圖6所示的兩聯(lián)聯(lián)動多路閥負(fù)載敏感系統(tǒng)。并假設(shè):Q1和Q2分別為第一聯(lián)和第二聯(lián)通過流量;p11、p12分別為第一聯(lián)和第二聯(lián)補(bǔ)償閥后壓力;p21、

圖6 多路閥兩聯(lián)聯(lián)動原理圖
p22分別為第一聯(lián)和第二聯(lián)負(fù)載壓力;Qm為變量泵最大排量時所對應(yīng)流量;Δp為負(fù)載敏感泵設(shè)定壓差。則存在以下關(guān)系:
(11)
(12)
Q泵=Q1+Q2≤Qm
(13)
其中,當(dāng)且僅當(dāng)p0-max(p21,p22)≤Δp時,式(13)中的等號成立。
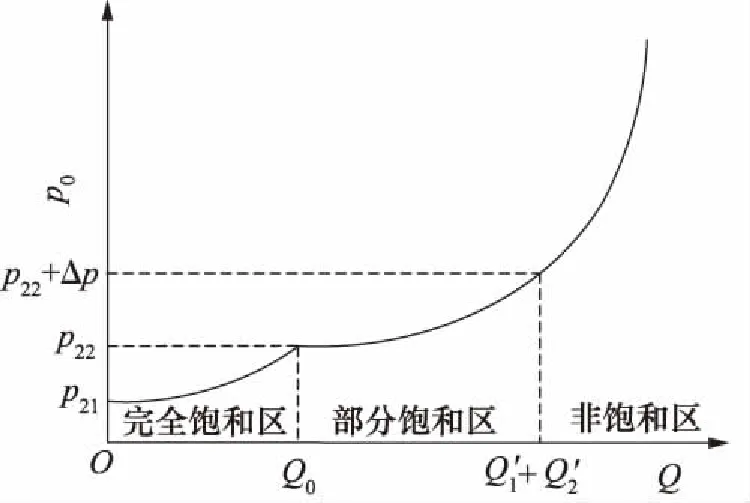
假設(shè)第一聯(lián)和第二聯(lián)主閥開度保持一致,且負(fù)載p21 圖7 兩聯(lián)聯(lián)動負(fù)載敏感系統(tǒng)流量壓力曲線 將第一聯(lián)和第二聯(lián)流量與泵出口壓力p0的關(guān)系曲線放在同一坐標(biāo)系下,作直線p0=p22+Δp,分別交兩條曲線于A點(diǎn)和B點(diǎn),則A點(diǎn)和B點(diǎn)的橫坐標(biāo)分別表示泵出口壓力為p22+Δp時的兩聯(lián)通過流量,設(shè)為Q1′、Q2′。作直線p0=p22,交曲線與點(diǎn)C,并設(shè)C點(diǎn)橫坐標(biāo)為Q0。 將每一時刻p0值所對應(yīng)的各個流量相加,得到兩聯(lián)聯(lián)動時系統(tǒng)整體壓力流量曲線,如圖8所示。 圖8 兩聯(lián)聯(lián)動整體壓力流量曲線 當(dāng)變量泵最大流量Qm 由以上分析可以看出,多路閥兩聯(lián)聯(lián)動時流量分配與以下因素有關(guān): (1) 泵最大流量Qm是飽和現(xiàn)象產(chǎn)生的直接原因,Qm越大,越不容易產(chǎn)生飽和現(xiàn)象; (2) 兩聯(lián)負(fù)載差值p22-p21直接影響Q0、Q1′與Q2′的取值,進(jìn)而影響飽和區(qū)范圍,負(fù)載差值越大,飽和現(xiàn)象越容易發(fā)生; (3) 考慮到改變主閥閥口開度會影響多路閥壓力流量曲線形狀,多路閥兩聯(lián)聯(lián)動時流量分配還與主閥閥口開度有關(guān)。 (1) 負(fù)載敏感泵與負(fù)載敏感閥共同構(gòu)成負(fù)反饋控制關(guān)系,負(fù)載敏感閥通過其前后壓差對負(fù)載敏感泵進(jìn)行控制,最終實(shí)現(xiàn)泵源輸出的流量與控制閥所設(shè)定的流量匹配; (2) 通過對兩聯(lián)聯(lián)動多路閥負(fù)載敏感系統(tǒng)工作過程進(jìn)行建模,以變量泵最大流量為主要分析對象,對飽和現(xiàn)象分區(qū)間進(jìn)行了討論。結(jié)果表明:多路閥兩聯(lián)聯(lián)動時流量分配與泵最大流量、 兩聯(lián)負(fù)載差值及多路閥壓力流量曲線形狀有關(guān); (3) 為避免出現(xiàn)流量飽和現(xiàn)象,可依據(jù)實(shí)際工況中可能會出現(xiàn)的最大負(fù)載差值及相應(yīng)的流量要求,選取適合的變量泵規(guī)格;也可在檢測系統(tǒng)出現(xiàn)飽和現(xiàn)象后,主動調(diào)節(jié)主閥開口,適當(dāng)提高多路閥壓力流量增益,通過使飽和區(qū)間前移的方式達(dá)到消除飽和現(xiàn)象的目的。 參考文獻(xiàn): [1]黃新年,張志生,陳忠強(qiáng).負(fù)載敏感技術(shù)在液壓系統(tǒng)中的應(yīng)用[J].流體傳動與控制,2007,(5):28-30. [2]王慶豐,魏建華,吳根茂,等.工程機(jī)械液壓控制技術(shù)的研究進(jìn)展與展望[J].機(jī)械工程學(xué)報(bào),2004,39(12):51-56. [3]景俊華.負(fù)載敏感系統(tǒng)的原理及其應(yīng)用[J].流體傳動與控制,2010,(6):21-24. [4]李現(xiàn)友.負(fù)載敏感液壓系統(tǒng)典型工況原理分析[J].價值工程,2013,32(26):51-52. [5]黃宗益,李興華,陳明.液壓傳動的負(fù)載敏感和壓力補(bǔ)償[J].建筑機(jī)械,2004,(4):52-55,58. [6]WU D. Modeling and Experimental Evaluation of a Load-sensing and Pressure Compensated Hydraulic System[D].Saskatoon:University of Saskatchewan,2003. [7]高峰,潘雙夏.負(fù)流量控制模型與試驗(yàn)研究[J].機(jī)械工程學(xué)報(bào),2005,41(7):107-111. [8]肖前龍.負(fù)載敏感閥前補(bǔ)償在工程機(jī)械中的應(yīng)用研究[J].液壓氣動與密封,2014,(2):33-36,40.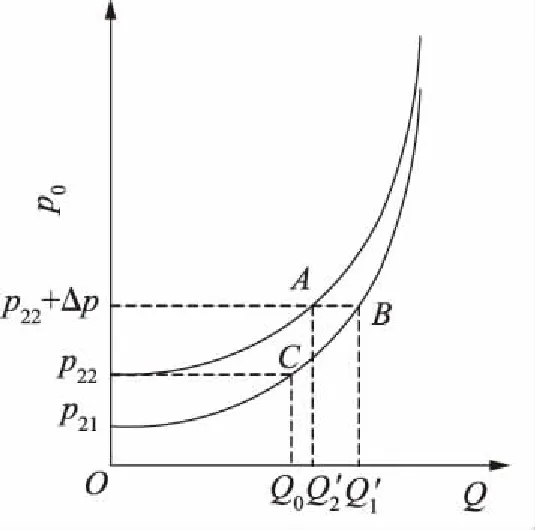
3 結(jié)論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
