電液伺服系統(tǒng)非線性振動誘因探究
2015-04-16 09:07:51燕山大學(xué)河北省重型機械流體動力傳輸與控制重點實驗室河北秦皇島066004燕山大學(xué)先進鍛壓成形技術(shù)與科學(xué)教育部重點實驗室河北秦皇島066004
液壓與氣動 2015年7期
, , , (1.燕山大學(xué) 河北省重型機械流體動力傳輸與控制重點實驗室, 河北 秦皇島 066004;2.燕山大學(xué) 先進鍛壓成形技術(shù)與科學(xué)教育部重點實驗室, 河北 秦皇島 066004)
引言
電液伺服系統(tǒng)是一個非線性動力學(xué)系統(tǒng),其在運行過程中容易產(chǎn)生噪聲或出現(xiàn)沖擊、爬行和非線性振動等異常現(xiàn)象,而且誘因不易確定,影響系統(tǒng)的穩(wěn)定工作[1]。
目前,對電液伺服系統(tǒng)動態(tài)特性的研究一般采用系統(tǒng)建模和數(shù)值仿真手段[2,3],所依據(jù)的理論多是經(jīng)典控制理論和線性動力學(xué)理論,較少運用非線性動力學(xué)理論進行分析研究。而且,多數(shù)在系統(tǒng)建模時對非線性因素進行線性化處理[4,5],研究結(jié)論與實際情況有較大差異,很難解釋實際動態(tài)測試中出現(xiàn)的時域波形繁雜、周期振蕩等異常現(xiàn)象,不能準(zhǔn)確反映執(zhí)行機構(gòu)的運動特征。
本研究根據(jù)非線性動力學(xué)原理,重點探究彈簧力和摩擦力等非線性因素對電液伺服系統(tǒng)運動特征的影響規(guī)律。通過理論研究及仿真分析,揭示系統(tǒng)執(zhí)行機構(gòu)運動的非線性動力學(xué)本質(zhì),旨在為揭示電液伺服系統(tǒng)非線性振動的誘因提供理論借鑒。
1 動力學(xué)模型
電液伺服系統(tǒng)的執(zhí)行機構(gòu)為伺服液壓缸,本研究以常用的雙作用單活塞桿液壓缸為例進行分析,其工作原理如圖1所示。
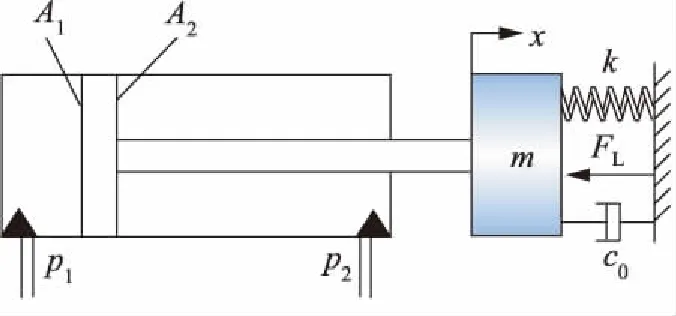
圖1 液壓缸工作原理
其動力學(xué)方程為:
(1)
式中,m為活塞及負載的折合質(zhì)量;x為活塞位移;Fc為黏性力;Fs為彈性力;Ff為摩擦力;FL為負載力;p1、p2分別為無桿腔和有桿腔壓力;A1、A2分別為無桿腔和有桿腔活塞有效作用面積。
2 非線性作用力及作用特征
2.1 非線性彈簧力及作用特征
液壓缸系統(tǒng)彈簧剛度由活塞桿剛度和液壓油剛度串聯(lián)合成,彈簧力主要來自于受控液壓油所構(gòu)成的液體彈簧。活塞運動會改變兩側(cè)液體彈簧的長度,引起液壓彈簧剛度的改變,變化規(guī)律為[1]:
(2)
式中,βe為油液體積彈性模量;L為液壓缸總行程;L1為活塞初始位置,即無桿腔液柱長度;VL1、VL2分別為閥與無桿腔和有桿腔之間管道內(nèi)油液體積;α、γ為待定系數(shù)。
由式(2)可得出液壓彈簧剛度隨活塞位移的變化規(guī)律,如圖2所示。
由圖2可知,液壓彈簧剛度隨活塞的運動呈現(xiàn)出非線性時變規(guī)律。當(dāng)α>0、γ=0時呈現(xiàn)軟彈簧特性,α=0、γ>0時呈現(xiàn)硬彈簧特性,α>0、γ>0時呈現(xiàn)半程軟彈簧、半程硬彈簧特性[6]。
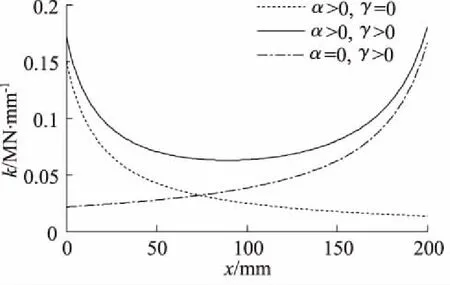
圖2 液壓彈簧剛度隨活塞位移的變化規(guī)律曲線
設(shè)y為在工作點x附近的振動位移,即Δx。將液壓彈簧剛度在工作點附近展成泰勒級數(shù)形式:
(3)
k(x+y)=k1+k2y+k3y2+o(y2)
(4)
此時,液壓缸系統(tǒng)的彈簧力可以表示為:
Fs=k(x+y)·y=k1y+k2y2+k3y3+o(y3)
(5)
另外,綜合考慮彈簧彈性勢能的對稱性以及其與彈簧力之間的關(guān)系,并去除高階無窮小項o(y3),彈簧力可以進一步表達為[6]:
Fs≈k1y+k3y3
(6)
暫不考慮摩擦力的非線性因素,集中研究非線性彈簧力對系統(tǒng)運動特征的影響,系統(tǒng)動力學(xué)方程式(1)在工作點x附近的特性可表達為:
=p1A1-p2A2-FL-Ff(v)
=Fsin(ωt+φ0)
(7)
式中,c0為結(jié)構(gòu)阻尼系數(shù),c1為線性摩擦系數(shù)。此外,因液壓缸中油壓有微觀波動,基本服從簡諧振動規(guī)律,故式(7)右邊可近似表示為Fsin(ωt+φ0),是系統(tǒng)的激振源[7]。F為激振力振幅;ω為激振角頻率;φ0為激振力的初相。
由非線性動力學(xué)理論可知,式(7)是含有阻尼的Duffing方程。該方程為研究電液伺服系統(tǒng)的非線性彈簧力的作用特征提供了結(jié)構(gòu)模型。
進一步將式(7)化為式(8)的形式,并用“諧波平衡法”[8]進行求解,可得幅頻關(guān)系式(9)。
(8)

(9)
式中,A為零次近似解的振幅。
由幅頻關(guān)系式可得幅頻特性曲線,如圖3所示。當(dāng)β>0時為尾部右偏曲線;當(dāng)β<0時為尾部左偏曲線。阻尼的作用限制了共振振幅的無限上升。當(dāng)激勵頻率從小到大或從大到小變化時,會發(fā)生振幅突然變化的“跳躍現(xiàn)象”[1]。
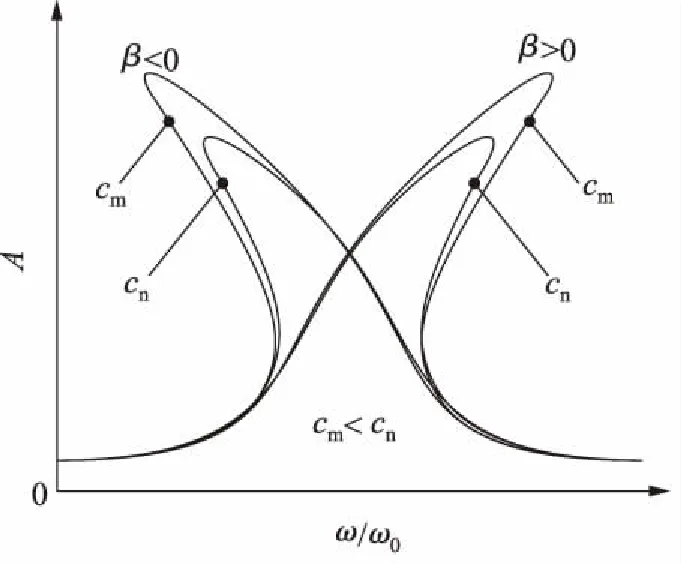
圖3 幅頻特性曲線
另外,Duffing方程在相平面上有三個平衡點,初始條件決定系統(tǒng)在不同流域中的軌線將趨于不同的穩(wěn)定定點。當(dāng)外加周期力不等于零時,系統(tǒng)便有可能在不同流域之間來回跳動,從而形成復(fù)雜的振蕩狀態(tài),做各種復(fù)雜的運動[9]。
2.2 非線性摩擦力及作用特征
圖4所示為體現(xiàn)摩擦力與速度關(guān)系的Stribeck曲線[10]。

圖4 Stribeck曲線

(10)

(11)
暫不考慮彈簧力的非線性因素,集中研究非線性摩擦力對系統(tǒng)運動特征的影響。摩擦力的作用效果隨工作點在Stribeck曲線上所處區(qū)段不同而異。當(dāng)工作點在區(qū)域II或III時,摩擦力呈現(xiàn)非線性時變特性。此時,在工作點附近,有[11]:
則系統(tǒng)動力學(xué)方程式(1)在工作點x附近的特性可表達為:
(12)

(13)

由非線性動力學(xué)理論可知,式(13)是受迫Van Der Pol方程。該方程為研究電液伺服系統(tǒng)的非線性摩擦力的作用特征提供了結(jié)構(gòu)模型。Van Der Pol方程存在極限環(huán),如圖5所示[1]。當(dāng)|c1|>c0時,摩擦力作用的效果是產(chǎn)生極限環(huán)型振蕩[12]。
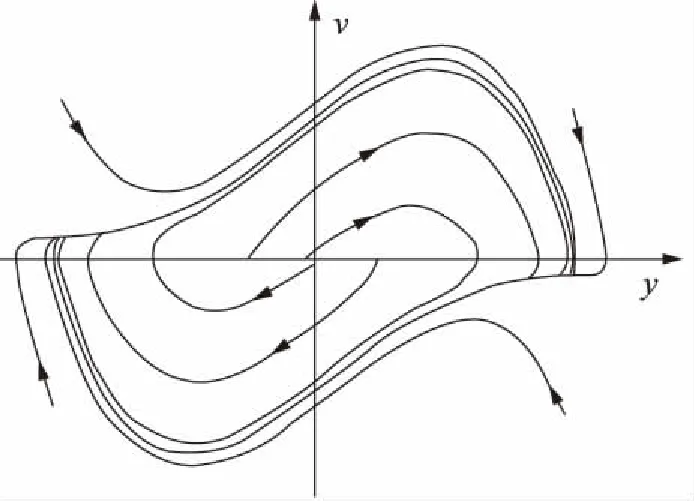
圖5 Van Der Pol 極限環(huán)
2.3 非線性彈簧力和非線性摩擦力耦合作用特征
由上述分析可知,非線性彈簧力的作用特征可以用Duffing方程描述;非線性摩擦力的作用特征可以用Van Der Pol方程描述。
進一步研究發(fā)現(xiàn),同時考慮彈簧力和摩擦力的非線性作用,可得到如下形式的動力學(xué)方程:
(14)
由非線性動力學(xué)理論可知,上式是Duffing-Van Der Pol耦合方程[13,14]。該方程為研究電液伺服系統(tǒng)的非線性動力學(xué)行為提供了結(jié)構(gòu)模型。
3 非線性耦合系統(tǒng)數(shù)值試驗
為了探索系統(tǒng)阻尼系數(shù)μ、非線性項系數(shù)βm和激振力Fn對系統(tǒng)運動特征的影響,取系統(tǒng)方程式(14)中的σ=1、ωm=0.5、ω=1、φ0=0得到具體算例式(15),進行數(shù)值試驗研究:
(15)
3.1 分岔特性研究
Fn取不同值時,分別以μ和βm為分岔參數(shù)作分岔圖,如圖6、圖7所示。圖中橫軸分別為單位質(zhì)量上的系統(tǒng)阻尼系數(shù)μ和彈簧力非線性項系數(shù)βm,縱軸為振動位移y。
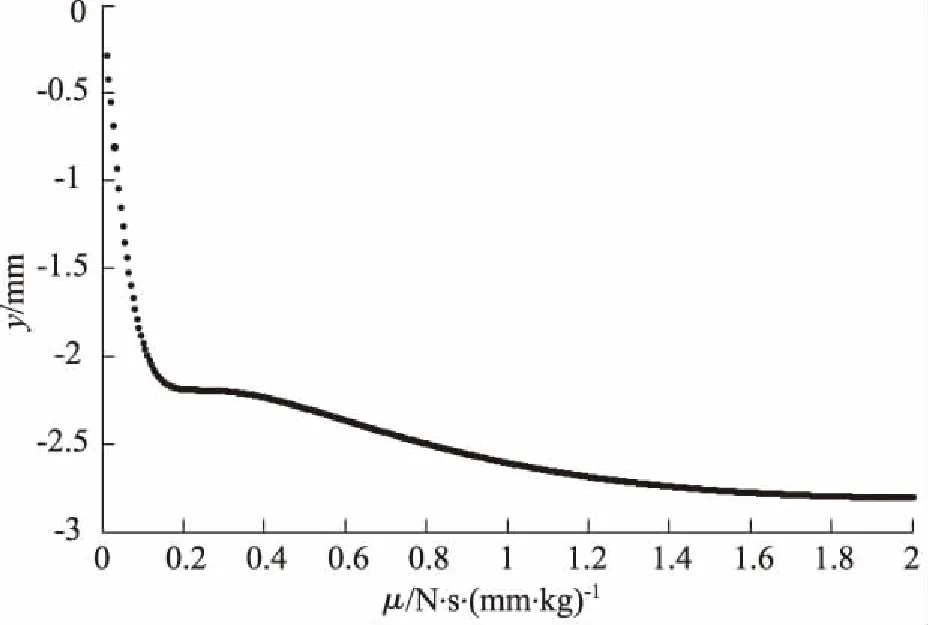
圖6 Fn=20 N·rad/(s·kg)時分岔參數(shù)為μ的分岔圖
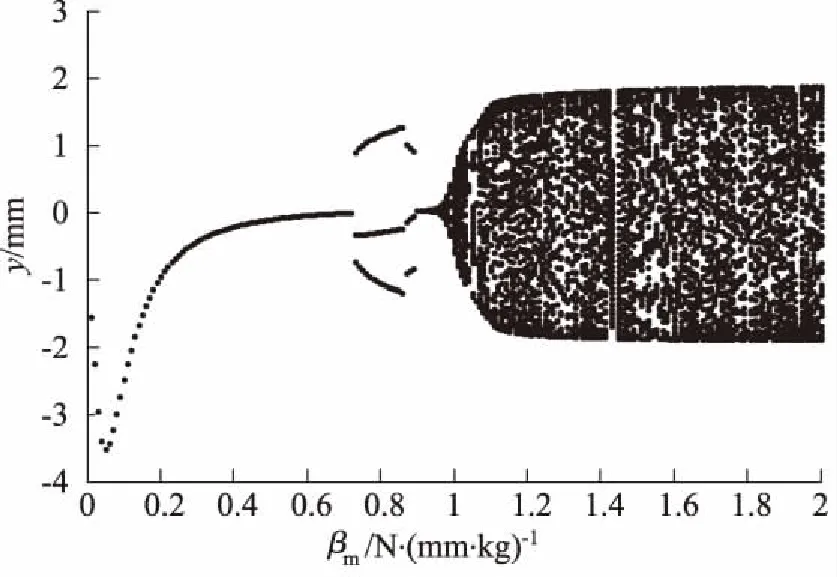
圖7 Fn=1.6 N·rad/(s·kg)時分岔參數(shù)為βm的分岔圖
由圖6、圖7可知,當(dāng)參數(shù)Fn、μ和βm取不同值時系統(tǒng)發(fā)生了不同程度的分岔現(xiàn)象[6]:① 系統(tǒng)方程存在單解、多解和無窮多個解,反映在分岔圖上表現(xiàn)為單值曲線、多值曲線和涂黑區(qū)等不同的區(qū)段,分別對應(yīng)于單周期、多周期和混沌等不同的運動狀態(tài)。② 隨著參數(shù)的變化,系統(tǒng)會發(fā)生運動狀態(tài)突然變化的動態(tài)分岔現(xiàn)象。
3.2 運動形態(tài)仿真
為了形象地體現(xiàn)系統(tǒng)在不同參數(shù)下的運動形態(tài),在MATLAB中建立仿真模型,對其典型的非線性動力學(xué)行為進行仿真[12]。采樣頻率取100 Hz,遠大于外控力頻率:fP=ω/2π=0.16 Hz。
當(dāng)μ=2 N·s/(mm·kg),F(xiàn)n=20 N·rad/(s·kg)時,仿真結(jié)果如圖8所示。時間歷程呈周期重復(fù);功率譜在基頻fP及其倍頻處出現(xiàn)尖峰;相軌跡在有限的區(qū)域內(nèi)重復(fù),呈一封閉曲線,即有極限環(huán)存在;Poincaré圖在一定的區(qū)域上只有1個孤立點存在。表明此時系統(tǒng)處于極限環(huán)型振蕩狀態(tài)。

圖8 極限環(huán)型振蕩形態(tài)
當(dāng)βm=0.75 N/(mm·kg),F(xiàn)n=1.6 N·rad/(s·kg)時,仿真結(jié)果如圖9所示。時間歷程呈周期重復(fù);功率譜在分頻fP/3及其倍頻處出現(xiàn)尖峰;相軌跡在有限的區(qū)域內(nèi)重復(fù),呈封閉曲線;Poincaré圖在一定的區(qū)域上有3個孤立點存在。說明此時系統(tǒng)處于3倍周期運動狀態(tài),周期3意味著混沌。
當(dāng)βm=1.1 N/(mm·kg),F(xiàn)n=1.6 N·rad/(s·kg)時,仿真結(jié)果如圖10所示。時間歷程無規(guī)律;功率譜出現(xiàn)噪聲背景和寬峰;相軌跡在有限區(qū)域內(nèi)不重復(fù);Poincaré圖在有限的區(qū)域上有無限個孤立點存在。說明此時系統(tǒng)處于混沌運動狀態(tài)[15]。
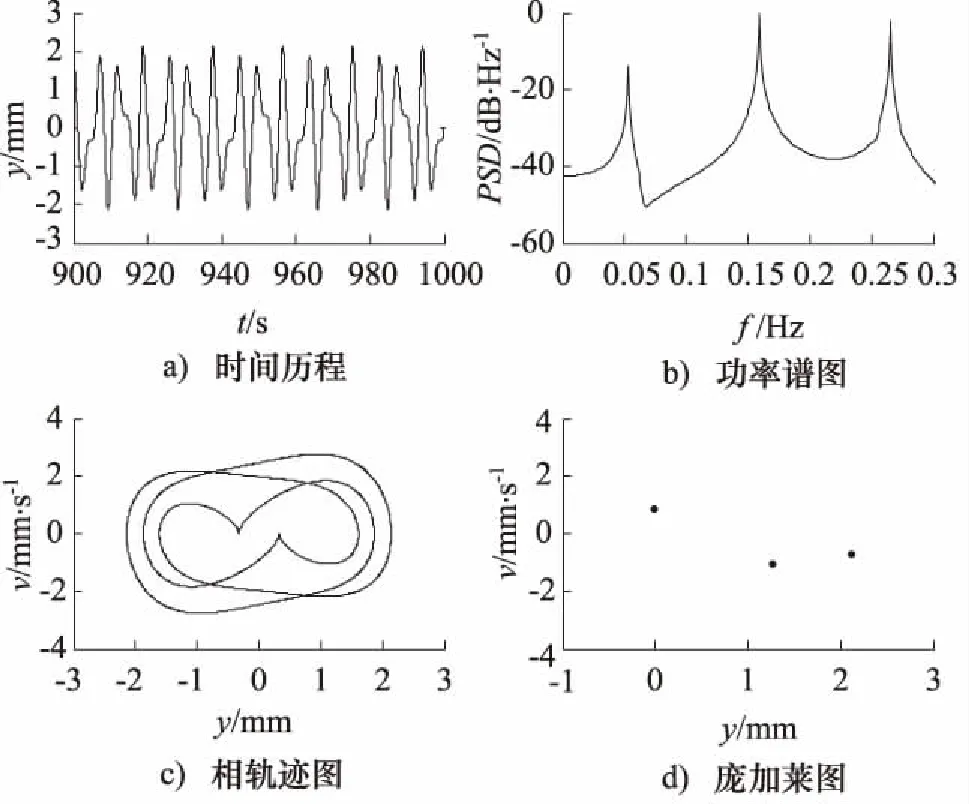
圖9 倍周期運動形態(tài)

圖10 混沌運動形態(tài)
由以上仿真分析可知,當(dāng)Fn、μ和βm取不同值時,系統(tǒng)在運行過程中蘊含豐富的非線性動力學(xué)行為,可能做極限環(huán)型振蕩、倍周期運動,進而通向混沌運動。
4 結(jié)論
以電液伺服系統(tǒng)為研究對象,根據(jù)非線性動力學(xué)原理,重點探究了彈簧力和摩擦力的非線性作用對系統(tǒng)運動特征的影響規(guī)律。通過理論研究和仿真分析,得到了如下結(jié)論:
(1) 非線性彈簧力和非線性摩擦力的耦合作用特征可以用Duffing-Van Der Pol方程來描述。
(2) 系統(tǒng)外加激振力、阻尼系數(shù)和彈簧力非線性項系數(shù)的大小影響系統(tǒng)的運動狀態(tài)。當(dāng)三者參數(shù)取不同值時,系統(tǒng)可能做極限環(huán)型振蕩、倍周期運動,進而通向混沌運動。
參考文獻:
[1]王林鴻,吳波,杜潤生,等.液壓缸運動的非線性動態(tài)特征[J].機械工程學(xué)報,2007,43(12):12-19.
[2]Dasgupta K,Murrenhoff H.Modelling and Dynamics of a Servo-valve Controlled Hydraulic Motor by Bondgraph[J].Mechanism and Machine Theory,2011,46(7):1016-1035.
[3]Lan Z,Su J,Xu G,et al.Study on Dynamical Simulation of Railway Vehicle Bogie Parameters Test-bench Electro-hydraulic Servo System[J].Physics Procedia,2012,(33):1663-1669.
[4]Milic V,Situm Z,Essert M.Robust H∞Position Control Synthesis of an Electro-hydraulic Servo System[J].ISA Transactions,2010,49(4):535-542.
[5]Tang R,Zhang Q.Dynamic Sliding Mode Control Scheme for Electro-hydraulic Position Servo System[J].Procedia Engineering,2011,(24):28-32.
[6]Zhu Y,Jiang W L,Liu S Y,et al.Incentives of Nonlinear Dynamics Behaviors in Electro-hydraulic Servo System[J].ICIC Express Letters,2015,9(1):231-236.
[7]楊安元,楊雪.液壓系統(tǒng)的減振方法研究[J].液壓與氣動,2004,(2):51-53.
[8]師漢民.機械振動系統(tǒng)[M].武漢:華中科技大學(xué)出版社,2004.
[9]劉秉正,彭建華.非線性動力學(xué)[M].北京:高等教育出版社,2004.
[10]朱勇,姜萬錄,王夢,等.非線性時變力作用下液壓缸爬行機理與抑制方法研究[J].農(nóng)業(yè)機械學(xué)報,2014,45(3):305-313.
[11]王林鴻,杜潤生,吳波,等.數(shù)控工作臺的非線性動態(tài)特性[J].中國機械工程,2009,20(13):1513-1519.
[12]姜萬錄,朱勇,鄭直. 摩擦力作用下電液伺服系統(tǒng)非線性動力學(xué)行為[J].北京航空航天大學(xué)學(xué)報,2015,41(1):50-57.
[13]Munehisa S,Naohiko I,Takashi T,et al.Analysis of Torus Breakdown into Chaos in a Constraint Duffing Van Der Pol Oscillator[J].International Journal of Bifurcation and Chaos,2008,18(4):1051-1068.
[14]李欣業(yè),張振民,張華彪,等.Duffing-van der Pol振子的時滯反饋控制研究[J].振動與沖擊,2010,29(10):118-121.
[15]姜萬錄,張淑清,王益群.混沌運動特征的數(shù)值試驗分析[J].機械工程學(xué)報,2000,36(10):13-17.
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
