三相電壓型PWM整流器新型雙閉環控制策略研究
2015-04-13 19:10:01任科明黃輝先胡超
現代電子技術 2015年1期
任科明 黃輝先 胡超


摘 要: 針對三相電壓型PWM整流器交流側電感值實際控制系統中存在誤差,往往忽略掉耦合項,以及系統參數變化影響整流器的動、靜態性能等問題,提出了一種新型的雙閉環控制策略。其中電流內環采用同步旋轉d?q坐標系下無電感L參數的解耦控制與內模控制相結合的方法,電壓外環采用滑模控制,在Matlab中利用Simulink工具箱搭建三相電壓型PWM整流器數值仿真數學模型,數值仿真結果表明系統仍獲得了較好的動、靜態性能,魯棒性強。并通過實驗平臺驗證該控制策略的正確性和優越性。
關鍵詞: PWM整流器; 無電感值控制系統; 內模控制(IMC); 滑模控制
中圖分類號: TN35?34; TM46 文獻標識碼: A 文章編號: 1004?373X(2015)01?0115?05
Abstract: A novel dual closed?loop control strategy is proposed in view of the problems that AC inductance value of the three?phase voltage?source PWM rectifier exists error and often ignores the coupling term in the actual control system, and the change of system parameters affects the dynamic and static performance. The hybrid mode of decoupling current control without exact value of the boost inductor in d?q synchronous frame and internal model control is adopted in the current inner loop. The sliding mode control is adopted in the voltage outer loop. The three?phase voltage?source PWM rectifier simulation model is build with Simulink toolbox in Matlab. The simulation results show that system can still obtain the excellent dynamic and static performance. And the system robustness is strong. The validity and superiority of the proposed control scheme were verified by experimental results of the physical platform.
Keywords: PWM rectifier; no inductance value control system; internal model control; slide mode control
0 引 言
三相電壓型 PWM整流器具有網側電流諧波小、雙向電能傳輸等優勢[1],已成為近年來一大研究熱點。內模控制魯棒性強,當系統參數受干擾時,仍能獲得優良的電流跟隨性能和很好的動態效果,控制性能優于傳統的PID控制,且結構簡單易于實現,已在工程實踐中得到廣泛應用。
早期的控制方案以三相[a?b?c]靜止坐標系模型為基礎,主要采用滯環控制[2]、預測電流控制[3]、自適應控制[4]和相位幅值控制[5]等方法,采用PI調節器實現對電壓和電流的控制,但常規PI調節器存在穩態與動態性能、快速性與超調量等方面的矛盾,難以得到很好的解決,往往造成實際應用中PI參數的整定困難[6?7]。近年來提出了內模控制[8]以改進控制性能,已在工程中得到成功的應用。文獻[9]提出一種在同步旋轉d?q坐標系下基于無電感L參數的電流解耦控制的方法,解決了工程中制作電感時工藝存在差異,電感參數值發生變化等問題,但這種新的方法仍然難以保持系統良好的動態性。文獻[10]提出了電流內環在[αβ]靜止坐標系下采用內模控制,實現了電流的無靜差跟蹤控制。文獻[11]電壓外環采用滑模控制方法,該方法對模型偏差、控制對象參數改變以及外部擾動具有較強的不敏感性。
在學者研究的基礎之上,本文提出了將無電感[L]參數的電流解耦控制和內模控制相結合設計了一種新的電流內環控制器,并建立了數學模型。為了驗證方法的準確性和優越性,進行了數值仿真和實物平臺驗證。
1 PWM整流器的dq數學模型
圖1為電壓型 PWM整流器(VSR)拓撲結構圖。如圖所示[ea,][eb,][ec]為交流側三相電壓;[ia,][ib,][ic]為交流側三相電流;[udc]為直流側電壓;[iL]為負載電流。
2 電流內環控制器設計
三相電壓型PWM整流器必須對指令電流進行無靜差跟蹤控制,本文首先在d?q旋轉坐標系中采用無電感值[L]參數的電流解耦控制[9],使得解耦控制在電感值[L]的變化時電流內環也能完全解耦,然后在兩相[αβ]靜止坐標系中采用內模控制[10],使得系統參數變化時能獲得很好的動態效果和優良的電流跟隨性能。
2.1 無電感值[L]解耦控制
2.2 內模控制器設計
在[αβ]坐標系中,電流內環控制過程中的指令信號為正弦波信號[iαβ=Iαβmsin(ω0t+φαβ)],是以基波角頻率[ω0]形式變化的,顯然在[αβ]靜止坐標系中采用比例或者傳統PI調節器,無法實現對[iαβ]的無靜差跟蹤控制。于是采用內模控制來調節電流內環,圖3表示為電流內環系統圖。
4 數值仿真驗證
4.1 系統參數
在Matlab/Simulink工具箱中搭建仿真平臺,對系統進行了數值仿真。系統仿真參數設置:工頻380 V三相正弦輸入,輸出直流電壓700 V,單位功率因數運行。額定功率12 kW,直流側電容3 400 μF,線路等效阻抗0.075 Ω,輸入電感4 mH。
4.2 仿真波形及分析
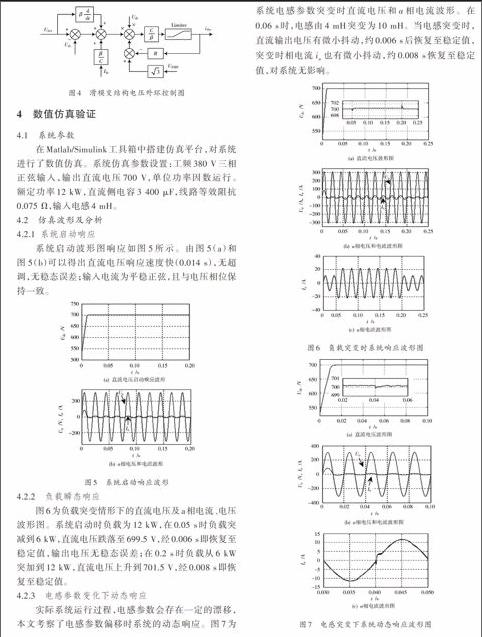
4.2.1 系統啟動響應
系統啟動波形圖響應如圖5所示。由圖5(a)和圖5(b)可以得出直流電壓響應速度快(0.014 s),無超調,無穩態誤差;輸入電流為平穩正弦,且與電壓相位保持一致。
4.2.2 負載瞬態響應
圖6為負載突變情形下的直流電壓及a相電流、電壓波形圖。系統啟動時負載為12 kW,在0.05 s時負載突減到6 kW,直流電壓跌落至699.5 V,經0.006 s即恢復至穩定值,輸出電壓無穩態誤差;在0.2 s時負載從6 kW突加到12 kW,直流電壓上升到701.5 V,經0.008 s即恢復至穩定值。
4.2.3 電感參數變化下動態響應
實際系統運行過程,電感參數會存在一定的漂移,本文考察了電感參數偏移時系統的動態響應。圖7為系統電感參數突變時直流電壓和a相電流波形。在0.06 s時,電感由4 mH突變為10 mH。當電感突變時,直流輸出電壓有微小抖動,約0.006 s后恢復至穩定值,突變時相電流[ia]也有微小抖動,約0.008 s恢復至穩定值,對系統無影響。
5 實驗驗證結果
前述理論分析中獲得了比較好的仿真效果,搭建了2 kW小功率樣機對該方法進行實物驗證。經過三相調壓器將三相工頻輸入380 V調到43.3 V,相電壓有效值為25 V,輸出直流電壓設定值60 V,輸入電感為4 mH,直流側電容為3 400 μF。控制系統DSP采用TMS320F2812,其時鐘頻率為150 MHz,如圖8所示。
采用泰克示波器和高壓筆采樣波形,其中高壓筆可以有效地將示波器和信號調理系統進行隔離,可以實時采取波形,并可以對波形進行任意衰減。
從實驗波形可以看出,電流波形正弦化,功率因數接近為1,直流電壓穩定在60 V。在負載突變情況下,直流電壓基本保持恒定,獲得了滿意的動態性能。
6 結 語
本文把內模控制應用到三相電壓型PWM整流器的電流跟蹤控制中,實現了三相電壓型PWM整流器對正弦交流信號的無差跟蹤控制,并且在d?q同步旋轉坐標系下,實現了電流內環無電感L參數電流解耦控制,仿真實驗時,電流內環控制采用文中所述的新方法,仿真結果表明該控制系統啟動快,輸出直流電壓無超調;穩定運行時,輸出直流電壓無穩態誤差,電流畸變率小,單位功率因數;對負載的擾動和電感參數攝動魯棒性強。同時,本文所提控制算法在實物平臺上得到了很好的驗證。
參考文獻
[1] EUGENIO W, ATSUO K. A high frequency AC/DC converter with unity power factor and minimum harmonic distortion [J]. IEEE Transactions on Power Electronics, 1991, 6(3): 364?370.
[2] GREEN A W, BOUS J T. Hysteresis current?forced three?phase voltage sourced reversible rectifier [J]. IEEE Journal, Part B, 1989, 136(3): 113?120.
[3] WU R, SHASHI B D, GORDON R S. Analysis of a PWM AC to DC voltage source converter under the predicted current control with a fixed switching frequency [J]. IEEE Transactions on Industry Applications, 1991, 27(4): 756?764.
[4] 周鑫,郭源博,張曉華,等.基于自適應跟蹤控制的三相電壓型PWM整流器[J].中國電機工程學報,2010,30(27):76?82.
[5] 王英,張純江,陳輝明.三相PWM整流器新型相位幅值控制數學模型及其控制策略[J].中國電機工程學報,2003,23(11):85?89.
[6] VLADIMIR B, VIKRAM K. A new mathematical model and control of a three?phase AC?DC voltage source converter [J]. IEEE Transactions on Power Electronics, 1997, 12(1): 116?113.
[7] 蘇玉鑫,段寶巖.一種新型非線性PID控制器[J].控制與決策,2003,18(1):126?128.
[8] 宋文祥,尹赟.一種基于內模控制的三相電壓型PWM整流器控制方法[J].電工技術學報,2012,27(12):94?101.
[9] 王恩德,黃聲華.三相電壓型PWM整流的新型雙閉環控制策 略[J].中國電機工程學報,2012,32(15):24?30.
[10] 張興,季建強,張崇巍,等.基于內模控制的三相電壓型PWM整流器不平衡控制策略研究[J].中國電機工程學報,2005,25(13):50?56.
[11] 帥定新,謝運詳,王曉剛.三相PWM整流器混合非線性控制研究[J].中國電機工程學報,2009,29(12):30?35.
[12] 黃凱征,汪萬偉,王旭.基于滑模控制的PWM整流器建模與仿真[J].電網技術,2009,33(8):18?22.
[13] 趙葵銀.PWM整流器的模糊滑模變結構控制[J].電工技術學報,2006,21(7):49?53.
[14] 陳瑤,金新民,童亦斌.基于滑模控制的三相電壓型PWM整流器系統仿真[J].系統仿真學報,2007,19(8):1849?1852.
[15] 陳耀軍,鐘炎平.基于合成矢量的電壓型PWM整流器電流控制研究[J].中國電機工程學報,2006,26(2):143?148.
[16] 郎永強,徐殿國,HADIANAMREI S R,等.三相電壓型PWM整流器的一種改進型前饋控制策略[J].電機與控制學報,2006,10(2):160?170.
