基于圖像處理的車輛防偏防追尾預警系統研究
2015-04-10 18:23:44趙檢群許勇王善超
計算技術與自動化 2015年1期
關鍵詞:卡爾曼濾波
趙檢群 許勇 王善超
摘 要:針對交通事故的不斷上升,設計一種基于圖像處理的車輛防偏防追尾預警系統。首先利用改進的Hough變換檢測出前方車道線并進行預警決策;然后在此車道區域內根據車底部陰影的梯度特征確定前方可能存在的車輛區域,通過卡爾曼濾波器跟蹤檢測到的目標,并利用歸一化轉動慣量做車輛驗證;最后根據世界坐標系和圖像坐標系之間的幾何映射關系測定與前車的距離,進而與計算得出的安全距離對比從而實現報警功能。實驗結果表明,該系統能夠有效的識別出車道線和車輛,并能很好的判斷車道線偏離情況和測量車間距,從而實現預警輸出。
關鍵詞:車道檢測;Hough變換;車輛識別;卡爾曼濾波;單目測距;預警系統
中圖分類號:TN911.73 文獻標識碼:A
Abstract:This paper designed a lane departure and rearend collision warning system based on image processing. The designed system firstly detects the lane by using the improved Hough transform method and then detects the vehicle ahead according to the gradient feature of shadow in this region of the lane. Kalman filters were used to track the target vehicle,which will be assisted by normalizedmutualinformation feature. Lastly the safe distance was calculated by image mapping in coordination system to world coordination system to realize alarm function. The experimental results show that the system can effectively detect lane lines and vehicles. The system can also detect the vehicle deviation and measure the distance between vehicles correctly, and give the early warning if necessay.
Key words:lane detection; Hough transform; vehicle identification;kalman filter; monocular measurement of distance; early warning system
1 引 言
隨著汽車保有量的迅速增加,使汽車安全成為了現代汽車學上最重要的議題,各大汽車廠商也將產品的安全性能作為差異化競爭的重點之一[1]。如今傳統的制動系統基本上已經走到了物理極限,主動安全系統將逐漸開始嶄露頭角。研究證明,若在公路交通事故發生前1.5s給駕駛員發出預警,則可避免90%的碰撞事故[2]。而車輛防碰撞預警系統是實現這一功能的重要手段,它能在事故發生前及時提醒駕駛員道路危險狀況,為駕駛員提供更多的反應時間,使駕駛更為安全[3]。
目前國內外關于汽車智能防撞預警系統的研究,主要集中在防止車道偏離和保持安全車距這兩個方面。經過長期大量的研究實踐,人們逐步認識到采用單目視覺技術,即僅使用一臺攝像機就能在一定程度上對前方道路環境進行監測。
因此本文設計了一種基于單目視覺的車載防偏防追尾預警系統。首先利用改進的Hough變換檢測出前方車道線;然后在此車道區域內根據車底部陰影的梯度特征確定前方可能存在的車輛區域,通過卡爾曼濾波器跟蹤檢測到的目標,并利用歸一化轉動慣量進行車輛驗證;再根據世界坐標系和圖像坐標系之間的幾何映射關系測算與前車的距離;最后根據車道狀況及前后車距判斷危險等級,最終向駕駛員提供相應的聲光報警信號。
2 系統總體設計
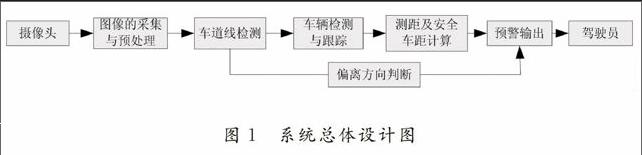
采用單目視覺技術的汽車防偏防碰撞預警系統的總體設計如圖1所示。
本系統硬件部分包括08100ZMP 鏡頭和MVVS078FC CCD相機、PCI 1394A高速圖像采集卡、DELL Latitude ES5420計算機;軟件部分由車道線檢測、車輛的檢測與跟蹤、測距、決策和報警等模塊組成。
系統通過攝像頭獲取前方道路圖像,經過灰度化、濾波等預處理后,先后識別出兩側車道線和前方車輛,然后綜合分析判斷車輛偏離情況以及與前方車輛的距離。如果車輛偏離或與前方車輛的間距超過設定的閾值,則通過指示燈和音頻等報警方式向駕駛員發出預警。
3 車道線檢測及偏離方向判斷
本文采用改進的Hough變換來檢測道路兩側的車道線,不僅要判斷車道是否偏離,還提取出ROI區域[4],為下一步的車輛檢測做準備。在進行車道線檢測之前,需對圖像進行預處理。
3.1 預處理
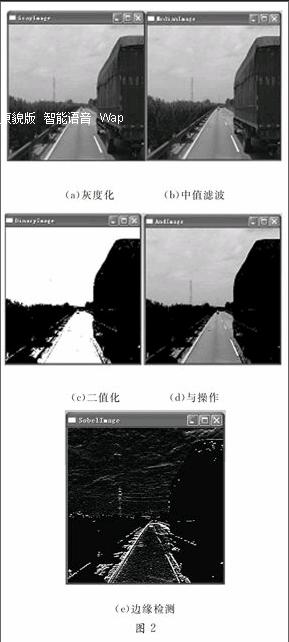
為了提高系統對圖像的分析和識別能力,減小圖像受光線、天氣等環境因素的影響,需要對圖像進行必要的預處理。首先對圖像進行灰度化處理[5],結果如圖2(a)所示。中值濾波法廣泛應用于圖像處理的減噪過程[6],平滑圖像,濾波效果如圖2(b)所示。車道線與路面背景部分的對比度差異較為明顯,利用大津閾值算法對圖像進行分割[7],獲得二值化圖像,如圖2(c)所示。為了突出車道線輪廓,將灰度化圖像與二值化圖像進行“與”運算,效果如圖2(d)所示。通過sobel算子邊緣檢測增強圖像的道路邊緣信息[8],結果如圖2(e)所示。
3.2 基于改進Hough變換的車道線檢測
Hough變換是由霍夫于1962年提出的一種用參數來檢測線性目標的方法,它的基本原理在于利用點與線的對偶性,將原始圖像空間給定的曲線通過曲線表達形式變為參數空間里的一個點[9]。
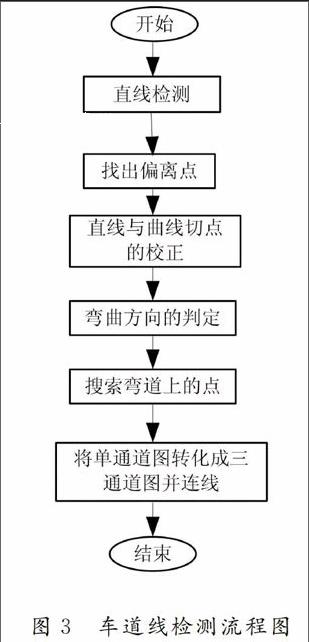
本文采用文獻[10]中的基于改進的Hough變換來檢測車道線[10],同時在判斷車道偏離的方法上與文獻[10]中的方法又有所區別,車道線檢測流程圖如下圖3所示。首先用Hough變換對左右兩車道分別進行直線檢測,從而確定車道線的大概形狀、位置;然后從左右直線車道交點向下遍歷,找出偏離點,再然后用偏離點到直線交點間的一小塊區域內的像素統計來確定車道的偏離方向,進而找出彎道的方法;最后將單通道圖像轉換成三通道圖像,在三通道圖像中用線連接檢測到的點。
具體實現過程如下:
1)直線檢測:通過對采集得到的圖像進行觀察,可以發現車道線一般位于圖像的下半部分,為了加快系統的處理速度,將圖像的下半部分設置為直線檢測區域。在用Hough變換進行直線檢測時,選擇左車道線θ的范圍為[40°,70°],右車道線的θ的范圍為[110°,160°]。
2)找出偏離點,并進行直線與曲線切點的校正,然后判斷彎曲方向。本文采用的方法可以快速的的判斷車道偏離方向,具體如下所示:將搜索的區域分為4個區域,如圖4所示,其中的區域1與區域3對應于車道的左偏,區域2與區域4對應于車道的右偏。對區域1和區域4進行灰度值的統計,分別記為numll,numrr,然后按以下步驟進行處理:
(1)若numll>numrr,且numrr<10,則說明車道左偏。這時蜂鳴器連續鳴叫,車輛左偏移的軌道圖標閃爍,提醒駕駛員向右操作。
(2)若numrr>numll,且numll<10,則判定車道右偏。這時蜂鳴器連續鳴叫,車輛右偏移的軌道圖標閃爍,提醒駕駛員向左操作。
(3)若沒有出現上述兩種情況,則判定車道行駛正常。
3)采用動態改變搜索區域的方法[11]找出車道的曲線部分的點。
4)先將單通道圖像轉化成三通道圖像,在此圖像上用綠線連接所檢測到的點。自此,完成了對車道線的識別提取,效果如下圖5所示。
數據可以得出單目視覺測距的相對誤差在10%以內,可以滿足實際工作中測距報警的需要,而更詳細的數據需要進一步的大量實驗來獲取。而前車處的車輛寬度值不僅關系到實測距離L的值,同時也影響安全距離S的值,因此準確的檢測到前方車輛是本文的關鍵所在。7 結 論
本文設計的基于圖像處理的車輛防偏防追尾預警系統能夠有效地檢測到車道線并進行正確的偏離報警;將檢測到的車輛圖像參數代入兩車間距模型公式計算出兩車間的車距及安全距離并實現報警輸出;滿足了公路環境下車道偏離及測距報警的要求。該方法簡單實用,該系統簡單實用、虛警率低、抗干擾力強,具有很好的實時性和較強的通用性。
參考文獻
[1] [EB/OL]http://www.eepw.com.cn/article/215601.htm汽車電子2014進入智能變革時代
[2] 喬維高. 汽車碰撞預警系統研究[J]. 武漢理工大學報,2005,27(1):121-123.
[3] 錢衛東,劉志強. 車輛智能防撞預警系統的研究和發展[J]. 技術與應用,2009,(3):22-25.
[4] 劉志強,溫華. 基于單目視覺的車輛碰撞預警系統[J]. 計算機應用,2007,27(8):2056-2058.
[5] 李瑩,高滿屯. 基于邊緣顏色信息的車牌定位算法[J]. 計算機仿真,2009,26(8):262-265,303.
[6] ZHENG D,ZHAO Y,WANG J. An efficial method of license plate location[J]. Pattern Recongnition Letters, 2005,26(15):2431-2438.
[7] 沈晶,劉海波,周長建,等. Visual C++數字圖像處理典型案例詳解[M]. 北京:機械工業出版社,2012.
[8] 艾海舟,武勃等譯. 圖像處理,分析與機器視覺[M]. 北京:人民郵電出版社,2003.
[9] 王昱. 移動機器人視覺道路檢測的研究與實現[D]. 南京:東南大學,2010.
[10]HOUGH P.V.C. Method and Means for Recognizing Complex Patterns[J]. U.S. Patent, 1962,30(1):54-59.
[11]李明,黃華,夏建剛. 基于Hough變換的車道檢測改進算法研究[J]. 計算機工程與設計, 2012,33(4):1638-1642.
[12]王文杰. 基于視覺的道路區域和車道線識別技術在智能車輛導航中的應用研究 [D]. 濟南:山東大學碩士學位論文,2009.
[13]張建明,張玲增,劉志強. 一種結合多特征的前方車輛檢測與跟蹤方法[J]. 計算機工程與應用, 2011,47(5):220-223.
[14]楊煒,魏朗,鞏建強,等. 基于單目視覺的縱向車間距檢測研究[J]. 計算機測量與控制,2012,20(8):2030-2041,2044.
[15]劉燕,劉浩學. 基于計算機視覺的單目攝影縱向車距測量系統研究[J]. 公路交通科技,2004,21(9):103-106,111.
[16]鐘勇,姚劍鋒. 行進中車輛臨界安全車距的探討[J]. 湖南大學學報:自然科學版,2001,28(6):54-58.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36