一種改進(jìn)的基于Hankel總體最小二乘法的精子多目標(biāo)跟蹤方法
2015-04-01 03:25:10雷茜茜黃文明鄧珍榮冷金強(qiáng)
桂林電子科技大學(xué)學(xué)報(bào) 2015年3期
雷茜茜,黃文明,鄧珍榮,冷金強(qiáng)
(桂林電子科技大學(xué) 計(jì)算機(jī)科學(xué)與工程學(xué)院,廣西 桂林541004)
檢測跟蹤運(yùn)動目標(biāo)是圖像處理和計(jì)算機(jī)視覺的重要研究內(nèi)容,它在軍事、視頻監(jiān)控和醫(yī)療診斷方面都有廣泛的應(yīng)用。多目標(biāo)跟蹤主要有特征建模、貝葉斯估計(jì)、光流場與運(yùn)動場、概率關(guān)聯(lián)匹配等方法。余東等[1]提出了改進(jìn)的最鄰近搜索法,通過計(jì)算幀間精子的運(yùn)動距離和方向預(yù)測其在下一幀圖像序列中可能出現(xiàn)的位置,并利用跟蹤丟失補(bǔ)償和預(yù)測范圍最小原則,與傳統(tǒng)最近鄰算法相比,提高了跟蹤的精度,但對于密度大、運(yùn)動無規(guī)律的精子無法進(jìn)行有效跟蹤。汪忠傳等[2]提出了一種基于小窗口的應(yīng)用于超長時間精子序列圖像跟蹤的最大距離預(yù)測法,通過結(jié)合最大距離預(yù)測法和最近鄰搜索算法對精子進(jìn)行實(shí)時跟蹤,但該算法和卡爾曼濾波、粒子濾波算法一樣,需要假設(shè)先驗(yàn)?zāi)P皖A(yù)測下一幀目標(biāo)所在位置。Ding等[3]提出了一種Hankel矩陣低秩逼近求運(yùn)動相似度的多目標(biāo)跟蹤算法,在未假設(shè)運(yùn)動先驗(yàn)?zāi)P秃湍繕?biāo)外觀信息的條件下實(shí)現(xiàn)了多目標(biāo)跟蹤,但該算法采用凸松弛和一般內(nèi)點(diǎn)(generic interior point)法求解Hankel矩陣的秩,計(jì)算復(fù)雜度和空間復(fù)雜度高,不易于實(shí)現(xiàn)。Collins[4]和Andriyenko等[5]提出了高階運(yùn)動模型算法,通過利用高階運(yùn)動模型實(shí)現(xiàn)跟蹤外觀相似的目標(biāo),且未假設(shè)先驗(yàn)?zāi)P汀5@些方法仍有限制,文獻(xiàn)[4]的時間復(fù)雜度高達(dá)O(d2.5),d為檢測區(qū)的個數(shù);文獻(xiàn)[5]的算法需要調(diào)試大量的參數(shù)。Dicle等[6]提出了Hankel總體最小二乘法(Hankel total least square,簡稱HTLS)、廣義線性分配法(generalized linear assignment,簡稱GLA)進(jìn)行關(guān)聯(lián)的多目標(biāo)跟蹤算法,此算法跟蹤準(zhǔn)確率較高,不需要目標(biāo)的外觀信息和運(yùn)動的先驗(yàn)?zāi)P停商幚砣我飧唠A運(yùn)動,且只需2個參數(shù),但該算法漏跟蹤率較高,處理時間較長,特別是目標(biāo)密集的圖像序列。鑒于此,提出一種改進(jìn)的Hankel總體最小二乘法。
1 最近鄰算法改進(jìn)的運(yùn)動相似性模型
在一組精子圖像序列中,精子外觀都很相似,且軌跡長度不一,故在進(jìn)行精子軌跡片段關(guān)聯(lián)的過程中面臨沒有外觀信息、目標(biāo)遮擋、運(yùn)動軌跡交叉、運(yùn)動無規(guī)律等,造成了跟蹤的困難。為解決此問題,結(jié)合最近鄰算法和Hankel總體最小二乘法對運(yùn)動精子進(jìn)行跟蹤。
1.1 最近鄰算法
最近鄰算法是提出最早、最簡單的目標(biāo)跟蹤方法,在某些特定情況下是最有效的。該方法首先設(shè)置一個關(guān)聯(lián)門用來限制潛在的決策數(shù)目,經(jīng)關(guān)聯(lián)門將所有回波進(jìn)行初步篩選得到候選回波。關(guān)聯(lián)門是整個跟蹤區(qū)域中的一個子區(qū)域,其中心位于被跟蹤目標(biāo)的預(yù)測位置,范圍根據(jù)在一定的概率上能收到正確回波而設(shè)計(jì)。最近鄰算法是對落在關(guān)聯(lián)門中的點(diǎn)進(jìn)行選擇,根據(jù)距離進(jìn)行判斷,選擇距離被跟蹤目標(biāo)預(yù)測點(diǎn)最近的點(diǎn)。
在圖像處理中應(yīng)用最近鄰算法,計(jì)算量小、簡單、易于實(shí)現(xiàn)。通過計(jì)算下一幀圖像中所有目標(biāo)與上一幀圖像中被跟蹤目標(biāo)的距離,取距離最近者為被跟蹤目標(biāo)在下一幀圖像中的位置來實(shí)現(xiàn)跟蹤[1]。
1.2 Hankel總體最小二乘法
設(shè)一個軌跡片段α由一個有序測量值yk組成,

其中,s≤k≤s+l-1,s為開始幀,l為軌跡片段α的長度。對于足夠大的n,線性回歸器是通用的近似器[7],可將軌跡片段α的基本運(yùn)動模型用線性回歸器表示為:

回歸器的順序n為運(yùn)動的復(fù)雜度。在沒有噪聲的情況下,n=rank(),其中為m(m≥n)列的Hankel矩陣:

于是,2個軌跡片段αi、αj之間的運(yùn)動相似度Pij可定義為[3]:
對于軌跡片段α的長度l,有運(yùn)動復(fù)雜性n<l,設(shè)分別為無噪聲坐標(biāo)序列和噪聲。為了便于表示,使Hankel矩陣[A|b]=[],[E|f]=[],其中:
E、f為A與b的誤差矩陣。由式(1)、(2)可得,(A+E)x=(b+f)。根據(jù)TLS通過最小化誤差矩陣E、f可以求解x的思想,可求解總體最小二乘(TLS)問題[8]求出α:

其中:○為Hadamard乘,(A+E)x=(b+f),[A|b],[E|f]∈SH。引入Ω恢復(fù)丟失的數(shù)據(jù)。
由于[E|f]和[A|b]是對角線元素相等的Hankel矩陣,可將式(4)改寫為:

其中:r(η,x)=b+f-(A+E)x=0;D為對角矩陣,其組成元素包含Hankel矩陣中ηi出現(xiàn)的次數(shù)。
結(jié)合約束條件和最小化問題[8],得
其中:π為處罰常量;r(η,x)為

p1=[Om×nIm×m],m=l-n。線性化r(η,x)可得:

于是,存在矩陣X∈Rm×(m+n-1)滿足:

其中,p0=[I(m+n-1)×(m+n-1)O(m+n-1)×1]。因此,最終可將式(6)寫為:
此式可通過Hankel最小二乘法求解[9]。
1.3 廣義線性分配(GLA)關(guān)聯(lián)
假設(shè)已知N條軌跡片段{α1,α2,…,αN},GLA問題可表述為最優(yōu)化問題[10-11]:

1.4 改進(jìn)的軌跡片段運(yùn)動相似度模型
針對Hankel算法計(jì)算復(fù)雜問題,結(jié)合最近鄰算法,提出最近鄰算法改進(jìn)的Hankel總體最小二乘運(yùn)動相似性計(jì)算方法。首先計(jì)算相鄰幀間所有軌跡片段αi和αj(i,j=1,2,…,N)的歐式距離Di,Di為αi與下一幀所有軌跡片段的距離向量。對Di按從小至大順序進(jìn)行排序,并記錄對應(yīng)索引Ii:

然后采用式(3)計(jì)算距離最近的軌跡片段αi與αIi(1)的相似度,若相似度為零,則計(jì)算αi與距離次近的軌跡片段αIi(2)的相似度,以此類推,直至相似度P為1停止計(jì)算。最后利用式(10)對相似度為1的軌跡片段進(jìn)行關(guān)聯(lián),實(shí)現(xiàn)對動物精子的多目標(biāo)跟蹤。
2 實(shí)驗(yàn)結(jié)果與分析
算法實(shí)驗(yàn)在配有Pentium IV 2.93 GHz和2 GB內(nèi)存的計(jì)算機(jī)上使用Matlab仿真實(shí)現(xiàn),以采樣頻率為25幀每秒、經(jīng)分割識別后的動物精子圖像序列為實(shí)驗(yàn)對象,其初始圖像如圖1(精子已編號)[1]。
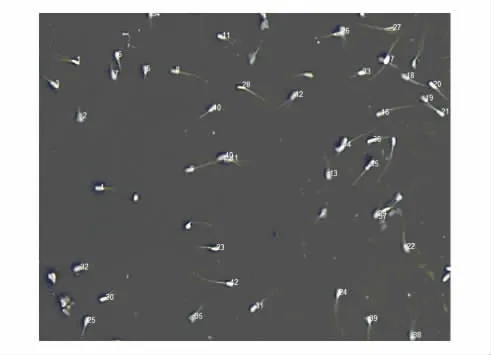
圖1 首幀精子圖像Fig.1 The first picture of sperm
為進(jìn)行有效對比,實(shí)驗(yàn)分別運(yùn)行最近鄰算法、文獻(xiàn)[6]算法和本算法對25幀動物精子圖像序列進(jìn)行多目標(biāo)跟蹤,獲得的精子運(yùn)動軌跡如圖2所示,其中圖2(a)、(b)和(c)分別為最近鄰算法、文獻(xiàn)[6]算法及本算法的跟蹤軌跡圖,圖2(d)為動物精子的實(shí)際運(yùn)動軌跡圖。對比分析圖2的跟蹤軌跡可看出,最近鄰算法與精子實(shí)際運(yùn)動軌跡的差別最大,改進(jìn)算法與精子實(shí)際運(yùn)動軌跡最接近。
各算法的處理時間和準(zhǔn)確率結(jié)果如表1所示。從表1可見,3種算法中,最近鄰算法僅需計(jì)算精子質(zhì)心間的距離,快速簡單,跟蹤速度最快,僅為3.59 s,但對于精子密集度較高、目標(biāo)遮擋、運(yùn)動發(fā)生突變的情況無法進(jìn)行有效處理,使得準(zhǔn)確率為90.60%最低。文獻(xiàn)[6]算法的跟蹤線索為運(yùn)動狀態(tài),不依賴目標(biāo)外觀,也不受外界因素的干擾,準(zhǔn)確率較高,達(dá)95.58%,但該計(jì)算相似度的過程很復(fù)雜,算法運(yùn)行時間較長。本算法結(jié)合兩者的優(yōu)點(diǎn),取距離最近的待跟蹤目標(biāo)與跟蹤目標(biāo)進(jìn)行相似性匹配,跟蹤時間縮短至3.94 s,降低了11.06%,且精子漏跟蹤率下降了一定幅度,更快速準(zhǔn)確地實(shí)現(xiàn)了精子多目標(biāo)跟蹤。
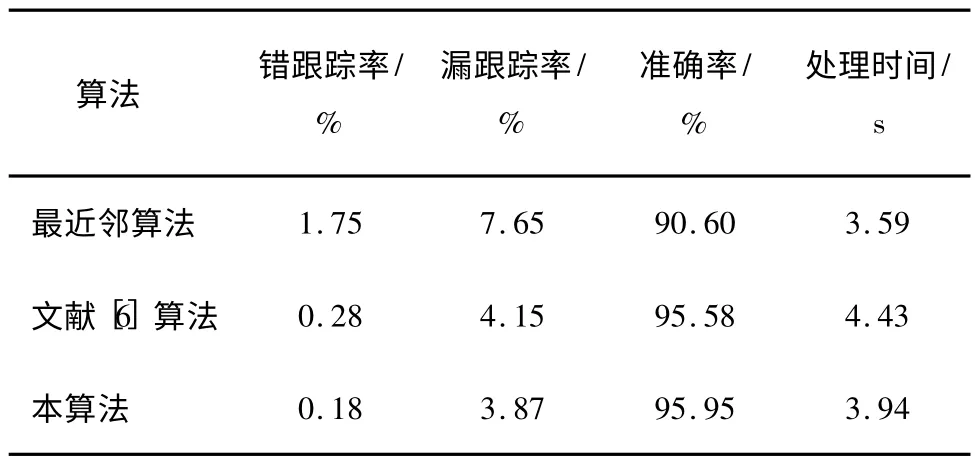
表1 算法運(yùn)行時間與準(zhǔn)確率Tab.1 Time and accuracy of three algorithms
3 結(jié)束語
Hankel總體最小二乘法為相似外觀的多目標(biāo)跟蹤提供了可靠的跟蹤線索。鑒于動物精子外觀的相似性,利用文獻(xiàn)[6]算法,并在進(jìn)行運(yùn)動相似性匹配的同時結(jié)合最近鄰算法縮小匹配范圍,提高跟蹤速度。實(shí)驗(yàn)結(jié)果表明,本算法能穩(wěn)定、準(zhǔn)確且快速地跟蹤動物精子的運(yùn)動,為后續(xù)精子質(zhì)量參數(shù)分析的準(zhǔn)確性提供了可靠保證。但本算法在進(jìn)行軌跡跟蹤的過程中未解決精子彈性碰撞問題。為滿足實(shí)際應(yīng)用的要求,進(jìn)一步提高準(zhǔn)確率仍需今后更深入研究。
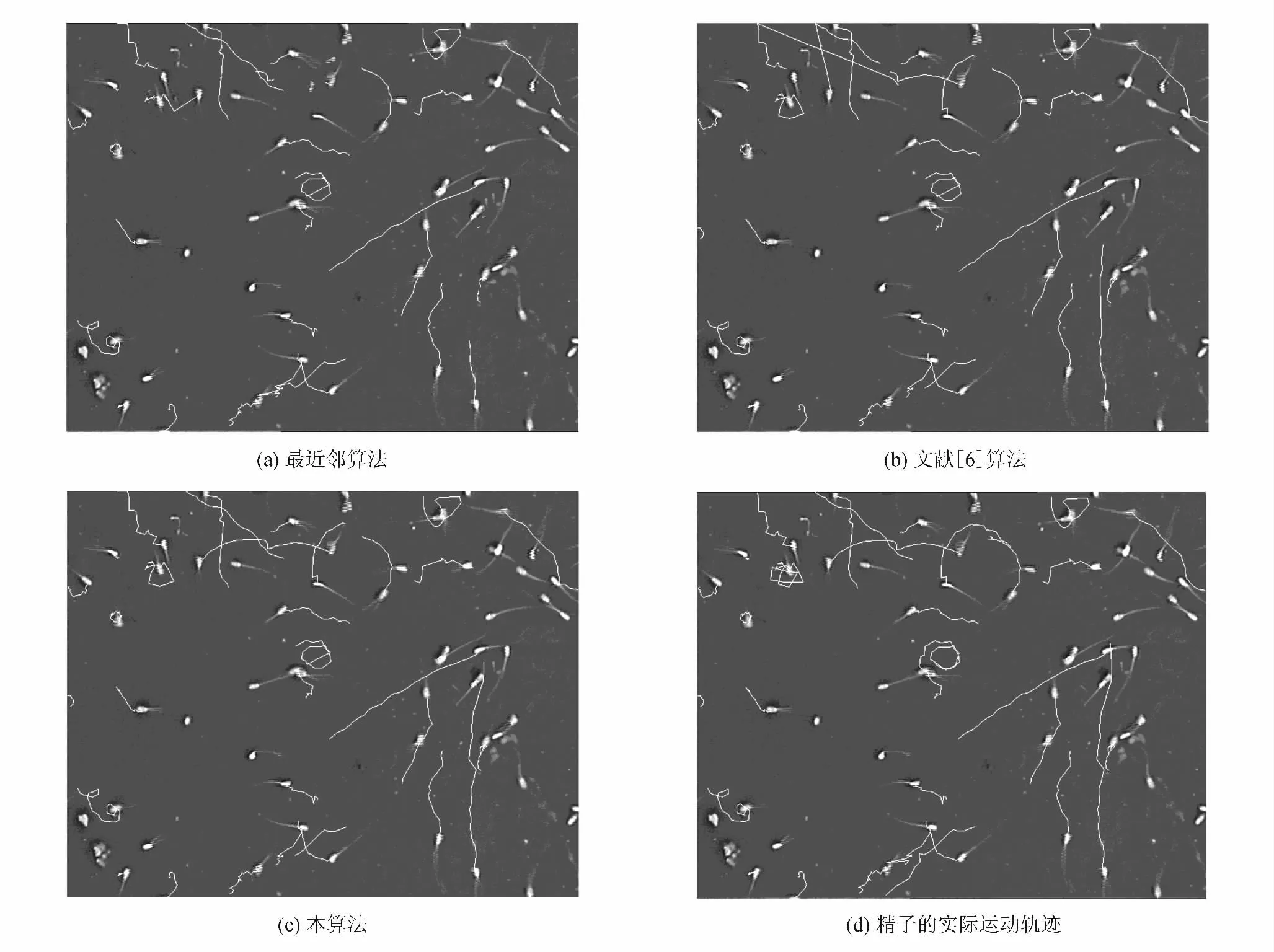
圖2 3種算法跟蹤及實(shí)際軌跡Fig.2 Tracked trajectories of three algorithms and real trajectories
[1]余東.豬精子質(zhì)量自動分析系統(tǒng)應(yīng)用研究[D].桂林:桂林電子科技大學(xué),2012:27-39.
[2]汪傳忠,任明響,武海燕.最大距離預(yù)測法在超長時間精子序列圖像跟蹤中的應(yīng)用[J].測試技術(shù)學(xué)報(bào),2014,28(2):132-136.
[3]Ding T,Sznaier M,Camps O.Fast track matching and event detection[C]//Anchorage:the IEEE Conference on Computer Vision and Pattern Recognition,2008:1-8.
[4]Collins R.Multi-target data association with higher-order motion models[C]//Providence:the IEEE Conference on Computer Vision and Pattern Recognition,2012:1744-1751.
[5]Andriyenko A,Schindler K,Roth S.Discrete-continuous optimization for multi-target tracking[C]//Providence:the IEEE Conference on Computer Vision and Pattern Recognition,2012:1926-1933.
[6]Caglayan D,Mario S,Octavia C.The way they move:tracking multiple targets with similar appearance[C]//IEEE International Conference on Computer Vision,2013:2304-2311.
[7]Ross G,Soland R.A branch and bound algorithm for the generalized assignment problem[J].Mathematical Programming,1975,8(1):91-103.
[8]Shmoys D,Tardos E.An approximation algorithm for the generalized assignment problem[J].Mathematical Programming,1993,62(1):461-474.
[9]Gold S,Rangarajan A.Softmax to softassign:neural network algorithms for combinatorial optimization[J].Journal of Artificial Neural Networks,1995,2(4):381-399.
[10]Breiman L.Hinging hyperplanes for regression,classification and function approximation[C]//IEEE Transaction on Information Theory,1993:999-1011.
[11]Park H,Zhang L,Rosen J B.Low rank approximation of a Hankel matrix by structured total least norm[J].BIT Numerical Mathematics,1999,39(4):757-779.
[12]Markovsky I,Huffel S V.Overview of total least squares methods[J].Signal Processing,2007,87(10):2283-2302.
