一種鐵鎳合金磁致伸縮位移傳感器設計*
2015-04-01 12:19:42鮑丙豪曹一涵
傳感器與微系統 2015年12期
孔 寧,王 娟,鮑丙豪,曹一涵
(江蘇大學 機械工程學院,江蘇 鎮江212013)
0 引 言
磁致伸縮位移傳感器是利用力磁耦合產生的磁彈性波在磁伸波導絲中傳播延時效應來實現位移測量。該傳感器具有測量精度高、測量范圍大、重復性好、穩定性高、非接觸測量以及適用于惡劣環境等優點[1],已被美歐等發達國家廣泛地應用于石油、化工和機械制造等領域。美國MTS 公司開發的量程為2 000 mm 的R 系列位移傳感器,分辨力高達2 μm,線性度達±0.01%,平均無故障時間高達20 年[2],我國在磁致伸縮位移傳感器研究方面雖與西方國家還有較大差距,但也正在積極探索,并取得一定成就[3]。
本文闡述了力磁耦合扭轉應力波的產生和感應線圈檢測磁彈性波產生電信號機理,優化了磁致伸縮位移傳感器的激勵信號參數和檢測信號脈寬調制(PWM)處理電路,所得傳感器信號更易處理和控制,實現待測量D/A 顯示,并對優化后傳感器性能進行相關分析。
1 磁致伸縮位移傳感器的相關理論
1.1 力磁耦合扭轉應力波產生分析
磁致伸縮材料具有優異的電磁性能,當其同時受到縱向磁場和軸向環形磁場共同作用時,磁疇排列發生改變,在宏觀上表現為材料的扭轉[4],圖1 是單個磁疇受到磁場作用時的取向變化分析。
此處不考慮溫度變化影響,則磁疇的自由能僅由自身內應力和外界磁場決定[5]。圖1(a)所示為磁伸材料未施加激勵電流時,環形磁場Hp=0,此時磁疇僅受到內應力和永久磁體產生的軸向磁場He作用,M1為磁疇平衡時取向。圖1(b)是磁伸材料施加周期性瞬時激勵電流Ip時,根據右手定則,在波導絲周圍產生周期性的瞬時環形磁場Hp,其與軸向磁場He耦合疊加并共同作用于磁疇,M2為此時磁疇平衡時取向,使磁疇取向在空間上偏轉一定角度,磁疇的偏轉引起材料宏觀上扭轉變形,使待側位置處形成振動源,即產生力磁耦合扭轉應力波,實現電磁能轉換為機械能。

圖1 內應力、偏置磁場及脈沖磁場引起磁疇取向變化Fig 1 Change of internal stress,bias magnetic field and pulse magnetic field cause magnetic domain orientation
1.2 感應線圈檢測磁彈性波產生電信號機理
力磁耦合扭轉應力波的檢測方法是采用磁致伸縮逆效應實現[6],當待測位置處產生磁彈性波后,形成的振動源沿磁伸材料以聲速v 向兩端傳播,傳向末端所引起的振動經阻尼裝置吸收,根據逆磁致伸縮效應,傳向前端的振動會產生扭轉式沖擊波,致使檢測線圈處磁伸材料內部磁疇變化,進而引起其周圍磁場改變。
圖2 所示為彈性波拾取裝置,線圈直接纏繞到波導絲的一端,偏置磁鐵用于整形檢測線圈感應的激勵脈沖信號。當磁伸材料周圍磁場變化時,反映待測位置處磁感應強度B、感生磁場強度M 和介質磁場強度H 之間關系

式中 μ0為真空磁導率。根據法拉第電磁感應定律,檢測線圈兩端產生感應電動勢E,實現機械能轉換為電磁能,其大小如式(7)所示[8]

式中 N 為檢測線圈匝數,S 為線圈等效橫截面積,m2。
2 磁致伸縮位移傳感器測量原理

圖2 彈性波信號拾取裝置Fig 2 Device of elastic wave signal pickup
圖3 是傳感器的工作原理示意圖,當激勵信號模塊產生的脈沖電流Ip施加于磁伸材料波導絲時,脈沖沿磁伸材料向前傳播,根據電磁理論,其周圍產生周向環形磁場Φa,該磁場與游標磁環產生的縱向磁場Φb耦合得到瞬間扭轉磁場Φc,由于磁致伸縮效應,導致合成磁場處的磁致伸縮線內部磁疇發生瞬間形變,在波導絲表面形成力磁耦合磁彈性波,并沿軸向以聲速v 向波導絲兩端傳播,傳向末端的磁彈性波被阻尼器件吸收,傳向激勵端的信號則被檢波裝置接收[9]。
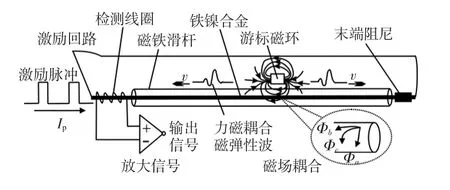
圖3 磁致伸縮位移傳感器工作原理示意圖Fig 3 Diagram of magnetostrictive displacement sensor working principle
感應線圈感應產生的輸出信號通過檢測信號調理電路,得到正比于測量位移的PWM 信號。圖4 是時間差測量示意圖,設磁彈性波的傳播速度為v,通過計算磁彈性波從發生位置至測量基點間的時間t 得出待測位移量,故磁鐵至感應線圈間的距離為[10]


圖4 時間差測量示意圖Fig 4 Diagram of time difference measurement
3 傳感器電路系統設計
圖5 是磁致伸縮位移傳感器電路結構框圖,主要由激勵信號產生電路、檢測信號處理電路和D/A 顯示部分組成。
3.1 激勵信號發生電路設計

圖5 磁致伸縮傳感器電路結構框圖Fig 5 Structure block diagram of magnetostrictive sensor circuit
激勵信號發生電路主要包括脈沖信號發生電路、單穩態觸發電路和脈沖功率放大電路組成。本實驗選用的鐵鎳合金材料直徑0.75 mm、長度92 cm,分析鐵鎳合金材料本身性能和相關理論,實驗選用NE555 組成的多諧振蕩器產生周期為1.5 ms 的矩形波信號。為了方便后續電路脈寬可調,需給鐵鎳合金施加6 ~12 μs 的窄脈沖,本實驗選用10 μs 的窄脈沖信號,如圖6 中a 曲線所示。

圖6 單穩態和功放電路輸出波形Fig 6 Output waveforms of monostable and power amplifier circuits
由于單穩態電路輸出的窄脈沖信號帶負載能力弱,不足以直接驅動波導絲產生磁彈性波。本文實驗設計了由TDA1514 構成的窄脈沖功率驅動放大電路,圖6 中a 曲線所示為脈沖功率放大信號,從圖中可知,輸出的窄脈沖信號幅值達10.3 V,實驗所用鐵鎳合金直流電阻器為2.43 Ω,將激勵脈沖信號加載到波導絲材料,其脈沖電流幅值高達4.24 A,滿足實驗激勵要求。
3.2 傳感器輸出信號電路設計
由于檢測線圈的感應信號十分微弱,僅有幾毫伏,且頻率較高,還有雜波干擾,故必須將其進行濾波、放大等處理,圖7 中a 曲線是感應信號濾波放大波形圖,圖中前兩個信號分別為感應到的激勵信號和磁彈性波信號,第三個信號是由磁彈性波信號傳至傳感器末端反射而形成的,故通過電壓滯回比較電路得到三個脈沖信號(圖7 中b 曲線所示)。

圖7 感應信號放大、電壓比較、PWM 電路信號輸出波形Fig 7 Output waveforms of inductive signal amplification,voltage comparison and PWM circuits
考慮到末端反射波脈沖信號對后續時間測量的影響,設計了PWM 電路(圖8 所示),采用CD4013 構成D 觸發器,通過捕捉參考脈沖信號和比較電路的磁彈性波信號的脈沖上升沿而產生PWM 信號(圖7 中c 曲線所示),為了使參考脈沖信號與感應信號相位一致,本實驗選用單穩態觸發信號作為參考脈沖信號,且需調節合適的脈寬,使其大于感應信號激勵波的脈寬,這樣通過硬件電路有效地消除了末端反射波造成的影響,提高信號質量,觸發信號的響應快,方便后續處理。

圖8 電壓比較與PWM 電路圖Fig 8 Voltage comparison and PWM circuit
4 傳感器性能測試與分析
在實驗環境下對傳感器性能進行測試,本實驗選用92 cm鐵鎳合金材料實驗,去除傳感器檢測線圈端和末端測量盲區,該傳感器有效測量量程84 cm,滑動磁鐵組件,每隔3 cm 記錄一組數據,同時,記錄模擬式電壓值和數字式時間示數,測得數據分別通過Matlab 軟件最小二乘法進行數據擬合,圖9 和圖10 分別為數字式和模擬式最小二乘法擬合曲線,通過數字式和模擬式擬合曲線可以看出:實驗測得數據均勻地分布在擬合直線上,且在該傳感量程范圍內擬合線性度高。
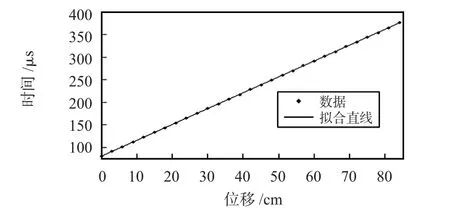
圖9 數字式最小二乘法擬合直線Fig 9 Fitting straight line of digital least square method
數字式最小二乘法擬合曲線關系為

式中 T 為返回脈沖與激勵脈沖之間的時間差,μs;s 為活動永久磁鐵的實際位移,cm。
可計算出數字式傳感器的線性度為


圖10 模擬式最小二乘法擬合直線Fig 10 Fitting straight line of analog least square method
式中 Δsmax為測量點中的最大偏差,YFS為測量值的滿量程輸出。
模擬式最小二乘法擬合曲線關系為

式中 U 為活動磁鐵實際位移所對應的電壓值,V;s 為活動永久磁鐵的實際位移,cm。
可計算出模擬式傳感器的線性度為

5 結束語
本文設計了一種數字/模擬式鐵鎳合金磁致伸縮位移傳感器,研究并分析力磁耦合扭轉應力波產生和感應線圈檢測磁彈性波產生電信號機理,在PWM 電路設計中,通過觸發電路很好地消除了波導絲末端反射波信號。根據傳感器相應參數標定實驗,當激勵脈沖信號脈寬為10 μs,激勵功放幅值達10.3 V,檢測線圈匝數為600 匝時,該傳感器的激勵脈沖信號驅動鐵鎳合金波導絲效果理想,兩種反映鐵鎳合金磁致伸縮位移傳感器測量線性度的輸出方式線性度相當,基本能夠滿足設計的整體要求,該傳感器系統設計成本低,結構簡單,為后續基于磁致伸縮效應的相關位移傳感器的開發研制奠定了基礎。
[1] 馮希辰,周新志,余 波.磁致伸縮位移傳感器回撥信號濾波器設計[J].傳感器與微系統,2013,32(6):104-106.
[2] Carvalho H R,Bruno A C,Braga A M,et al.Remote magnetostrictive linear position sensors interrogated by fiber Bragg gratings[J].Sensors and Actuators A,2007,135:141-145.
[3] 李叢珊,蔣印平.一種磁致伸縮位移傳感器的優化設計方法[J].傳感技術學報,2014,27(9):1202-1207.
[4] 馮 健,趙 輝,劉偉文.磁致伸縮位移傳感器電路系統的設計[J].電子測量技術,2010,33(1):11-13,28.
[5] 夏 天,高學緒,李紀恒,等.鐵鎳合金絲威德曼效應測量與磁疇結構[J].磁性材料及器件,2008,39(2):21-25.
[6] 王智強,彭勇剛,韋 巍.磁致伸縮位移傳感器在精密注塑機上的應用[J].傳感器與微系統,2010,29(9):138-144.
[7] 王 崢,常曉明,脇若弘之.長線磁致伸縮位移傳感器的磁極化強度模型[J].傳感技術學報,2010,23(8):1075-1078.
[8] Seco F,Martin J M,Jimenez A R.Improving the accuracy of magnetostrictive position sensors[J].IEEE Transactions on Instrumentation and Measurement,2009,58(3):722-729.
[9] 楊雅潔,周 麗.基于磁致伸縮效應的超聲應力波傳感器設計與優化[J].儀器儀表學報,2010,31(11):2474-2480.
[10]Kim Y G,Moon H S,Park K J,et al.Generating and detecting torsional guided waves using magnetostrictive sensors of crossed coils[J].Independent Nondestructive Testing and Evaluation,2011,44(2):145-151.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
