RFID 系統中基于中繼傳感器的協同防碰撞算法*
2015-04-01 12:19:56孫曉玲李偉勤
傳感器與微系統 2015年12期
孫曉玲,鄭 勉,李偉勤
(西南石油大學 電氣信息學院,四川 成都610500)
0 引 言
射頻識別(radio frequency identification,RFID)系統[1]中,影響數據傳輸完整性的重要因素是多個應答器同時競爭無線信道導致閱讀器無法確認數據來源發生數據碰撞[2]。因此,多應答器進入多閱讀器探測范圍內時,需要通過識別正確信號消除其它信號干擾,為閱讀器與應答器之間建立正確、穩定和可靠的通信[3],成為RFID 系統應用中的關鍵問題。
Fyhn K 等人[4]在多個閱讀器會話過程中,基于實際的樹防沖突協議集成和可靠的標記算法提高標記的概率估計的可靠性。文獻[5]結合影響RFID 系統識別率的關鍵因子,得出了標簽與閱讀器平面夾角、讀寫器天線數量、標簽與讀寫器距離等關鍵參數。文獻[6]優化了搜索效率從而降低了系統空閑率。文獻[7]提出了輪胎嵌入式超高頻無源RFID 系統功率傳遞模型。
針對RFID 系統中的多閱讀器與數據碰撞帶來的多應用、多樣性服務等問題,提出了一種適用于RFID 系統的基于中繼傳感器的協同防碰撞機制,主要包括:1)設計了一種避免數據碰撞的中繼傳感器;2)為了實現RFID 系統中繼傳感器協同合作設計了傳感器外圍電路;3)基于系統工作區異類輻射元的信號,通過中繼傳感器匯聚,提出了協同防碰撞算法。
1 RFID 系統中繼傳感器
傳統RFID 系統包括:應答器、閱讀器和多樣性高層應用。對于復雜的多樣性應用中經常出現多閱讀器、多應答器之間的數據通信,數據碰撞問題嚴重,導致應答器識別效率和準確度下降。
假設RFID 系統中,數據發生碰撞概率為Pt,可以分為以下三種情形:
1)同一應答器與多閱讀器之間的數據碰撞,概率記為Pc1;
2)同一閱讀器與多個應答器之間的數據碰撞,概率記為Pc2;
3)n 個閱讀器與m 個應答器之間的數據碰撞,概率記為Pc3。
因此,RFID 系統的數據碰撞從概率分布角度具有式(1)所示關系

因數據碰撞導致電磁場狀態變化帶來的電感耦合產生的電流,對系統數據通信產生干擾,干擾權重λ 可由式(2)計算得到

其中,S 為碰撞檢測面積,d0為有效通信距離,β 為磁感強度,特別是第三種數據碰撞發生后對系統信號識別和定位產生影響,測量分布情況如圖1 所示。
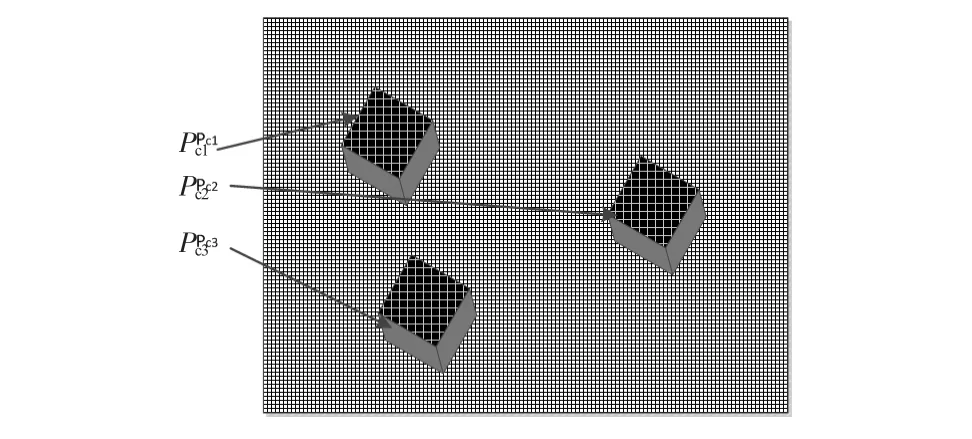
圖1 數據碰撞效應測量分布Fig 1 Measurement distribution of data collision effect
為了消除圖2 所示的碰撞效應,對傳統RFID 系統進行擴展,將圖1 所示架構增強為圖3 所示,協同RFID 系統為協同應答器、協同閱讀器和中繼節點。
圖2 所示的協同RFID 系統中數據碰撞概率分布滿足泊松特性如式(3)所示

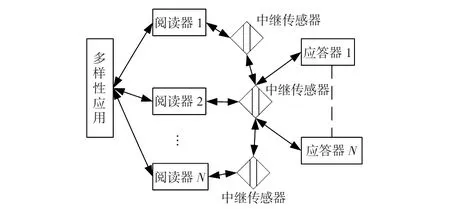
圖2 協同RFID 系統架構Fig 2 Collaborative RFID system architecture

其中,p 為協同合作處理后數據碰撞平均概率。
通過一組中繼傳感器為應答器組合閱讀器組之間提供高效和可靠的數據識別和信標定位,預防數據碰撞,該中繼傳感器必須具有與應答器、閱讀器之間建立無線通信的天線電路和具有協同處理功能的微控器,傳感器頭結構如圖3所示。

圖3 中繼傳感器頭結構Fig 3 Structure of relay sensor probe
使用圖3 所設計的中繼傳感器,通過傳感器、應答器和閱讀器之間的協同合作,可以對圖2 所示的數據碰撞效應測量分布優化改進。
2 協同防碰撞算法
基于1 節中設計的圖3 所示中繼傳感器頭結構,圖4給出了其外圍電路結構,選用元件包括:16 位80C51 微處理器、CONN—D15F 連接器等。其中,15 位引腳連接器與微處理器的A0 ~A14 連接,A16 為空閑位。
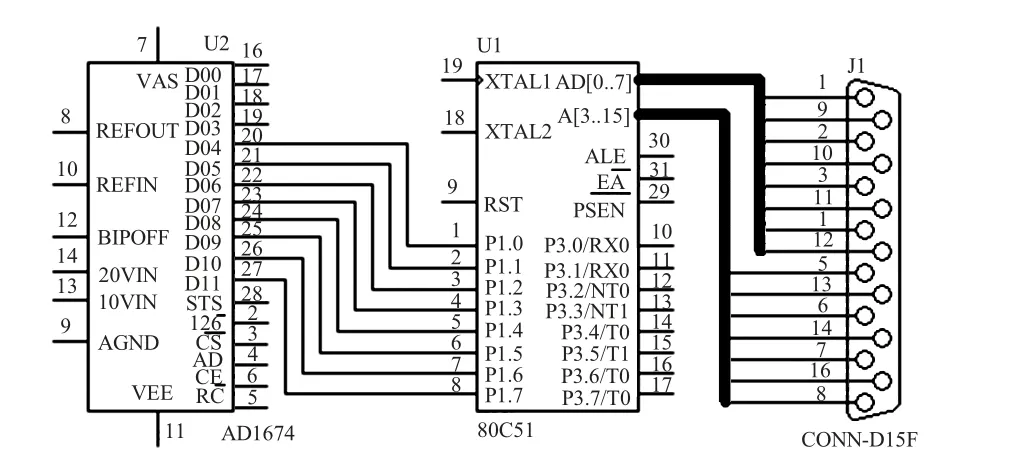
圖4 中繼傳感器結構Fig 4 Structure of relay sensor
加入中繼傳感器節點的RFID 系統的輻射元包括三類:電流元、磁感元和感知元。由它們構成的電磁場覆蓋的空間具有式(5)所示的關系
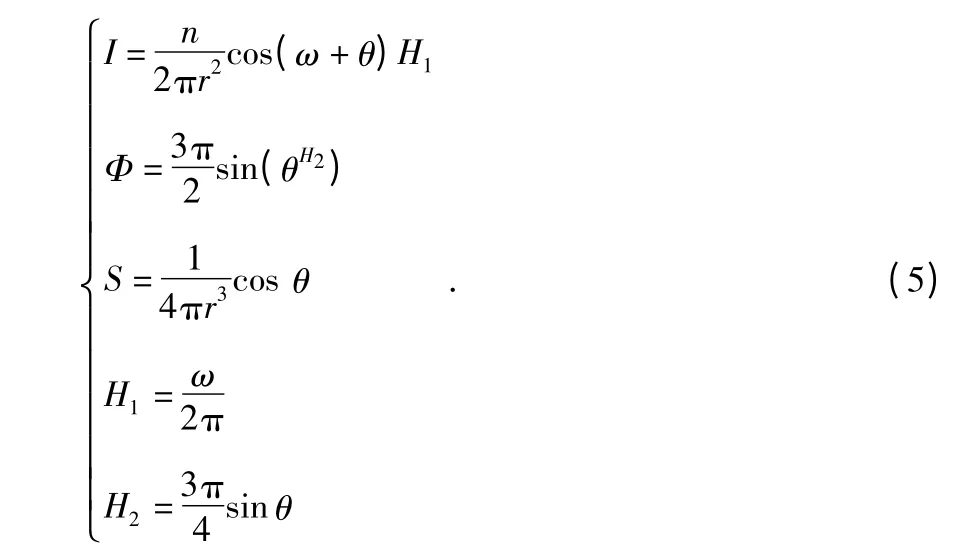
其中,I,Φ,S 分別為電流元、磁感元和感知元獲取信號強度,n 為線圈匝數,ω 為系統工作角頻率,θ 為中繼傳感器感知點與天線線圈原點夾角弧度,H1為磁場強對電流影響系數,H2為中繼傳感器感知信號對磁場強影響系數。
在上述三元輻射覆蓋的電磁場中,異構信號傳輸循環流程如圖5 所示。其中,上電過程時為無源應答器通過磁感耦合從閱讀器獲得電壓和中繼傳感器電池為微處理器與數據發射前端供電的過程。初始化工作包括:閱讀器發送檢測信號尋找功能區域內所有應答器、應答器回復閱讀器響應和中繼傳感器干涉多應答器與多閱讀器的碰撞感知。具體信號包括應答器信號、中繼信號和匯總信號。

圖5 中繼傳感器與應答器端電壓循環傳輸Fig 5 Voltage loop transmission of relay sensor and transponder terminal
基于中繼傳感器的協同防碰撞算法流程為:
1)多閱讀器、多應答器和中繼傳感器上電;
2)初始化閱讀器和應答器芯片,以及中繼傳感器微處理器和外圍電路;
3)多閱讀器的請求命令幀和多應答器的響應命令幀匯聚至中繼傳感器節點;
4)中繼傳感器節點之間協同合作,利用式(1)~式(3)獲得協同合作增益;
5)根據式(4)~式(6)獲得系統匯總信號;
6)閱讀器根據式(7)得到防碰撞后由中繼傳感器發送來的正確應答器響應數據。
3 實驗驗證
為了對比和分析所提防碰撞算法與無中繼傳感器的RFID 系統的ALOHA 防碰撞算法的性能表現,實驗環境布設情況如下:
1)在100 m×80 m 的舉行區域內部署10 個同類應用閱讀器;
2)部署50 個同類應用應答器;
3)部署5 個中繼傳感器,其參數設置:輸出電流為10~20 mA,工作距離為10~20 m,發射率為0.1~1.1,負載電阻為50 kΩ。
第一組實驗中,設定應答器回復閱讀器響應幀的個數從10 開始,以步長為10 遞增至50,統計測量閱讀器通過中繼傳感器讀取的時隙數,結果如圖6 所示。結果表明:傳統的ALOHA 防碰撞算法隨著系統中應答器個數的增加,閱讀器所需的讀取時隙數迅速增加,而所提算法因為在應答器和閱讀器之間加入了中繼傳感器從而降低了防碰撞所占用的系統資源,有效減少了所需讀取時隙。

圖6 讀取時隙數Fig 6 Read time slot number
第二組實驗,控制RFID 系統中發送的數據幀個數從1開始,以5 個幀為步長逐步遞增至30 個。統計測量數據幀從應答器到閱讀器的傳輸時延,結果如圖7 所示。結果發現,兩種防碰撞算法在數據幀規模從1 增大到15 之間,時延變化趨勢相同,所提算法時延明顯比ALOHA 算法短。特別是當數據幀個數達到20 后,傳統ALOHA 算法的時延突然迅速增加,而所提算法依然保持平穩趨勢,這主要得益于中繼傳感器的協同合作防碰撞算法,通過匯總來自閱讀器、應答器和中繼傳感器的信號,由中繼傳感器協同處理后正確到達閱讀器或應答器,為其通信提供可靠保障。
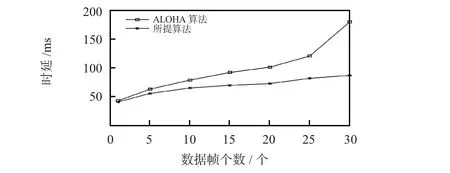
圖7 傳輸時延Fig 7 Transmission delay
4 結束語
本文研究了一種適用于多閱讀器應答器系統的基于中繼傳感器的協同防碰撞算法。首先將系統發生數據碰撞分為三種情形,根據數據碰撞角度和碰撞效應,設計一種可以避免數據碰撞的中繼傳感器結構,然后為了實現多中繼傳感器節點之間進行協同合作設計了外圍電路結構,最后結合三類輻射元的信號匯聚提出了中繼傳感器協同防碰撞算法。實驗結果表明:所提的基于中繼傳感器的協同防碰撞算法與傳統的ALOHA 算法相比,在讀取時隙和傳輸時延等方面具有明顯優勢。
[1] 王建偉,趙玉萍,Timo Korhonen.RFID 系統防碰撞協議研究—設計與優化[J].電子與信息學報,2009,31(1):1-4.
[2] 謝勝眉,趙軍輝.基于最優化原理的RFID 系統中的ALOHA防碰撞算法研究[J].電路與系統學報,2009,14(4):8-12.
[3] 劉建華,童維勤.RFID 系統中面向服務的動態資源配置優化機制[J].通信學報.2012,33(8):93-105.
[4] Fyhn K,Jacobsen R M,Popovski P.Fast capture-recapture approach for mitigating the problem of missing RFID tags[J].IEEE Transactions on Mobile Computing,2012,11(3):518-528.
[5] 劉亞麗,胡圣波,鄢富玉.嵌入式RFID 系統識別率關鍵因子的分析[J].工程設計學報,2012,19(6):479-484.
[6] 郭榮佐,張 濤,黃 君.RFID 系統8—4—2 動態多叉樹防碰撞算法設計與分析[J].重慶師范大學學報:自然科學版,2013(6):118-122.
[7] 胡圣波,司 兵,舒 恒.輪胎嵌入式超高頻無源RFID 系統的功率傳遞特性[J].農業工程學報,2013,29(21):150-158.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
