基于時柵傳感器的精密轉臺伺服控制系統設計*
2015-04-01 12:19:12李宏偉楊繼森江中偉冉揚潔李小雨
傳感器與微系統 2015年11期
關鍵詞:系統
李宏偉,楊繼森,江中偉,冉揚潔,李小雨
(重慶理工大學 機械檢測技術與裝備教育部工程研究中心時柵傳感及先進檢測技術重慶市重點實驗室,重慶400054)
0 引 言
時柵位移傳感器作為一種新型的絕對式角位移傳感器,采用“以時間測量空間”的新型原理作為理論基礎[1,2],采用感應電機的結構作為其主要框架模型,測量精度高、穩定性高、成本低,具有廣泛市場應用前景[3]。時柵分度轉臺在高精度定位、機床回轉測量、標定以及在科學研究中都有所應用,針對傳統時柵分度轉臺采用步進電機作為驅動所凸顯出來的電機轉速較慢和細分問題的局限性,提出了采用伺服電機替代步進電機作為驅動裝置,利用高精度時柵角位移傳感器作為檢測單元構成一個閉環控制系統。以μC/OS-Ⅱ操作系統作為軟件開發平臺,構建多任務管理為核心的新型伺服轉臺控制系統。
1 精密運動轉臺的設計方案
精密運動轉臺設計方案如圖1 所示,時柵位移傳感器作為位置檢測單元同轉臺同軸安裝,微處理器通過控制驅動來帶動電機使蝸輪副帶動轉動軸進而轉臺同時柵位移傳感器同軸轉動,時柵位移檢測的實際轉臺轉過的角度通過串口發送到處理器中,與微處理器發出的指令相比較,即可以得到轉臺的誤差。然后通過單神經元PID 控制算法達到對轉臺的精確控制。
2 伺服控制系統方案設計

圖1 時柵轉臺伺服控制系統方案Fig 1 Scheme of time grating turntable servo control system
該系統所使用的轉臺為時柵分度轉臺,驅動裝置為富士的GYS751 系列單軸交流伺服電機,電機的驅動選用與富士GYS751 系列伺服電機相匹配的RYC751D3—VVT2 型伺服放大器;轉臺的檢測單元為72 對極軸式時柵角位移傳感器,其測量范圍為0°~360°,測量不確定度為±1″[4]。整個伺服控制系統選用STM32F4 微處理器對伺服放大器進行驅動,實現對伺服電機的控制,利用時柵角位移傳感器將轉臺轉過的角度反饋給微處理器,構成一個閉環控制系統,達到對轉臺的精確控制。其控制框圖如圖2 所示。
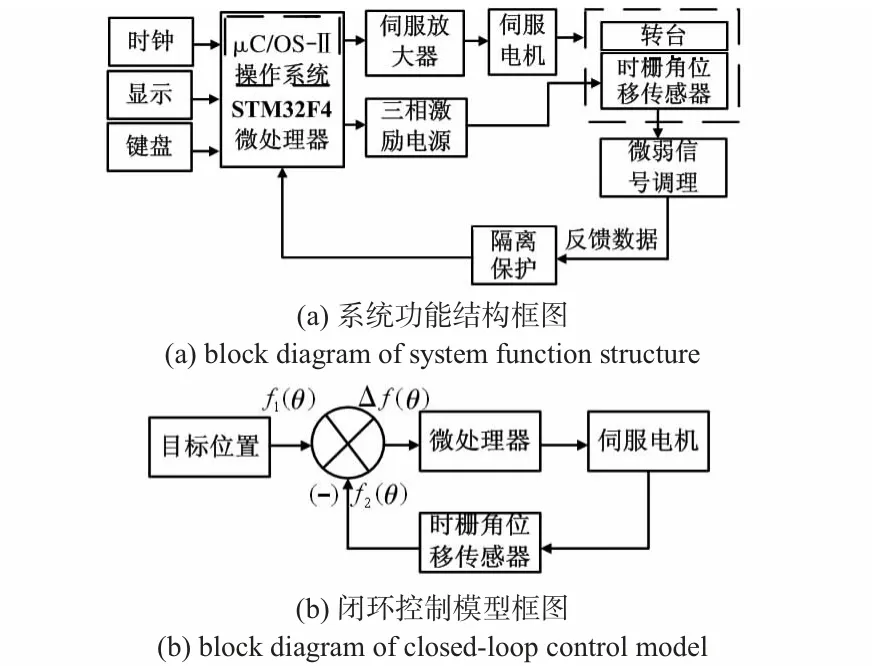
圖2 系統結構和控制模型Fig 2 System structure and control model
3 硬件設計
為了滿足時柵分度轉臺的低功耗、智能化、高速化和高精度的定位要求,整個硬件部分采用32 位ARM 處理器STM32F407VE 為核心,它具有增強型的DSP 指令集,高達1M 字節的片上閃存,系統晶振最高可達到168 MHz[5,6]。同時設計了顯示驅動模塊、鍵盤驅動模塊、電機驅動模塊和串口通信模塊,如圖3 所示。
1)顯示與鍵盤驅動模塊:顯示選用分辨率為640×480,顯示顏色達256 色的6.4 in(1in=2.54 cm)的真彩液晶屏。STM32F4 微處理器通過GPIOB 的PB0—PB7 作為數據端口與LCD 的D0—D7 端口相連;PB8—PB10 作為控制寄存器地址線與LCD 的A0~A2 端口相連。由于LCD 和微處理器的工作電壓不同,因此,通過驅動芯片74LS245 連接微處理器和LCD 進行電平轉換。

圖3 硬件電路Fig 3 Hardware circuit
針對鍵盤在工作現場的抗粉塵、抗油污和抗干擾能力等問題,選用薄膜按鍵,按鍵分為數字按鍵、字母按鍵和特殊功能按鍵,共計34 個,因此,選用5×8 的行列式鍵盤布局。為了提高微處理器的工作效率,選用專用的鍵盤驅動芯片CH454 進行驅動。
2)電機驅動模塊:伺服電機的驅動選用與富士電機GYS751 系列相匹配的伺服放大器RYC751D3—VVT2,微處理器的PA6,PA7 作為差分脈沖的輸出端分別與伺服放大器的差分管腳CA,CB 相連;PA3,PA4 分別作為模擬速度信號輸出端分別與伺服放大器的VFEF,M5 模擬速度輸入端相連[7,8]。GYS751 伺服電機的U,V,W 三相端同伺服放大器的三相端相連,伺服放大器接收微控制器輸出的差分脈沖和模擬速度信號后就可以驅動伺服電機按預定的方式轉動。
3)光電隔離模塊:由于伺服電機驅動模塊RYC751D3—VVT2 輸出功率大,為了減少它對主控元件的影響,因此,需要在微處理器和電機驅動之間采用隔離器。本方案采用的隔離器為安華高科技(Avago Technologies)公司生產的高速光電隔離器6N137,它是一種高速光電隔離器,同時具有溫度、電流和電壓補償功能以及高的輸入輸出隔離和5 mA的極小輸出電流[9]。
4 系統控制模型與算法
由于PID 控制算法簡單、魯棒性好、可靠性高,廣泛地應用于工業工程控制,但常規的PID 控制存在一定的局限性,因此,出現了許多改進的PID 控制算法[10]。根據系統的實際需要本系統采用的是單神經元PID 控制算法,單神經元PID 控制算法結構框圖如圖4 所示[11]。
設微控制器的發出的制定值為r(t);轉臺實際轉動角度值為y(t),則經過轉換器轉換后的狀態量為

式中 x1(t)為系統誤差變化的累積;x2(t)為誤差的變化量;x3(t)為誤差變化的一階差分。取遞進信號d(t)為
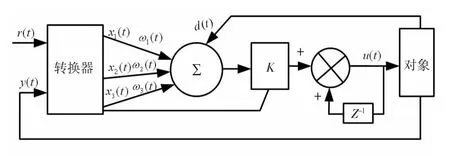
圖4 單神經元PID 控制框圖Fig 4 Block diagram of single neuron PID control

圖中,K 為神經元比例系數,K >0,而神經元產生的控制信號u(t)為

5 軟件設計
為了提高整個系統的實時性與系統的可維護性,在系統控制部分采用了μC/OS-Ⅱ開源操作系統的設計方案。此操作系統是一種占先式內核的小型實時操作系統,代碼開源,比較方便進行移值,整個軟件系統按照任務模塊設計,在操作系統的控制實現多任務分時運行。
系統主要有三個任務模塊,分別為按鍵監控任務、LCD顯示任務和鍵值處理任務:
1)按鍵監控任務:該任務主要是負責鍵盤數據的輸入與存儲,并將輸入的命令鍵值轉換為命令編碼,交由鍵值處理任務處理;
2)LCD 顯示任務:該任務主要是在LCD 上顯示系統的工作界面,響應按鍵監控任務,根據用戶的命令顯示相應的操作界面,簡化系統的工作,提高工作效率;
3)鍵值處理任務:該任務主要是根據按鍵監控任務產生的用戶命令編碼,實時響應用戶的按鍵命令,根據命令的分類,執行相應的命令功能。
整個軟件系統由3 個主要控制任務組成,并分時運行,其初始化過程如圖5 所示。
6 實驗結果
轉臺通過彈性聯軸器和時柵位移傳感器在伺服電機的帶動下同步轉動。通過電氣箱鍵盤向伺服電機發送轉動信號進一步控制轉臺轉動。整個系統的實驗平臺如圖6 所示。
實驗在精密實驗室進行,進行了單次實驗,得到了相關數據。整個系統的階躍響應如圖7 所示,可以看出整個系統的建立時間約為120 ms;上升時間約為60 ms;超調量約為1.5%,對速度具有良好的響應特性,圖8 所示為整個系統位置伺服誤差曲線輸出精度為±2″。
7 結束語

圖5 系統軟件流程圖Fig 5 Flow chart of system software
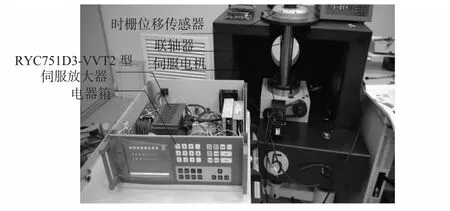
圖6 實驗平臺Fig 6 Experimental platform

圖7 系統階躍響應Fig 7 System step response

圖8 系統誤差曲線Fig 8 System error curve
本文系統利用單片微處器STM32F4 以及有效的將μC/OS-Ⅱ和單神經元PID 算法有效的融合在一起,采用高精度時柵位移傳感器作為位置檢測單元構成一個閉環控制系統。該系統具有速度響應時間短、精度高、穩定性高等優點,從而為時柵轉臺的產業化奠定了堅實的基礎。
[1] 冉揚潔,江中偉,楊繼森,等.基于TDC-GP 2 的高速時柵位移傳感器信號處理系統的研究[J].傳感技術學報,2014(12):1654-1658.
[2] 楊繼森,許 強,馮濟琴.基于STM32F4 的時柵位移傳感器信號處理系統集成化設計[J].傳感器與微系統,2013(12):113-116.
[3] 楊繼森,何 建,彭東林,等.基于STM32 的時柵轉臺高精度自動標定系統設計[J].傳感器與微系統,2014(3):107-109.
[4] 彭東林,劉小康,張興紅,等.基于諧波修正法的高精度柵位移傳感器[J].儀器儀表學報,2006,27(1):31-33.
[5] 楊繼森,江中偉,許 強,等.基于AD9959 與STM32F4 的時柵位移傳感器電氣系統設計[J].傳感技術學報,2013(8):1050-1054.
[6] 趙 瑾,葉曉劍,吳葉蘭,等.基于STM32 的紅外分光測油儀的設計[J].儀表技術與傳感器,2014(3):26-28,31.
[7] Hanab H Zilker.The move to customize servo amplifiers[J].Product Design and Development,2006,61(12):32-33.
[8] Tormey D.Using PWM servo amplifiers in noise-sensitive applications:Digtal PWM servo amplifiers are smaller,more efficient,less expensive,and easier to use than their linear counterparts[J].Electrical Design News,2005,50(25):113-114,116,118.
[9] 張南南,尤一鳴.惡劣環境下的高性價比數據采集系統[J].天津工業大學學報,2003,22(1):81-83.
[10]關守平,尤富強,徐 林,等.計算機控制理論與設計[M].北京:機械工業出版社,2012.
[11]李英順,倫淑嫻.模糊PID 溫度測控儀[J].儀表技術與傳感器,2003(1):20-22.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32