ACO-BP 神經網絡在電梯交通流預測中的應用*
2015-04-01 12:19:26萬健如賈祖新
傳感器與微系統 2015年11期
關鍵詞:電梯
萬健如,賈祖新,智 淵
(1.天津大學 電氣與自動化工程學院,天津300072;2.重慶能源職業學院 電梯學院,重慶402260)
0 引 言
隨著高層智能建筑的興起,電梯配置和群控調度對于樓宇內垂直交通效率的影響越來越大[1]。合理有效的電梯交通流預測是電梯配置和群控調度的基礎,可為其提供必需的交通數據信息[2],使系統可依據獲得的不同時段的客流強度,識別上下高峰、隨機層間等不同交通模式,并以此實現最佳配置和最優調度。
電梯交通流預測研究自20 世紀80 年代以來,出現了時間序列模型、指數平滑模型、神經網絡法、非參數回歸、支持向量機等方法[3~5]。其中,基于BP 神經網絡的電梯交通流預測模型發展迅速,但傳統的BP 算法具有對初值敏感、訓練時間長、易陷入局部極小值、預測精度低等缺點,這雖可通過附加動量法、自適應學習率、牛頓法等進行改進,但均存在局部極小問題和場合局限,不能滿足現代建筑智能化的要求。本文提出利用蟻群優化(ACO)的BP(ACO-BP)神經網絡進行全局優化,利用天津某大廈實際交通流數據對模型進行仿真驗證,結果表明了本文提出ACO-BP 神經網絡應用于電梯交通流預測系統的有效性。
1 交通流預測模型
1.1 電梯交通流分析
電梯交通流是由乘客數、乘客出現的頻率以及乘客在樓層的分布情況所描述的狀態量[4],其特性與建筑大樓類型息息相關。本文以5 min 作為時間間隔,通過統計進出某辦公大樓的總乘客數,得到交通流時間序列{x(ti),i=1,2,3,…,n;ti=i×td;td=5 min;}。交通流時間序列具有非線性、隨機性和高度的復雜性,甚至表現出混沌特性,很難用一個確定完整的函數表達式來描述,而神經網絡可在不建立精確數學模型的情況下逼近任意非線性映射,非常適合電梯交通流預測系統的建模。
1.2 神經網絡預測模型
1.2.1 網絡結構
理論上已經證明:在合適的結構和權閾值的情況下,包含一個S 型隱含層和一個線性輸出層的3 層BP 網絡可以逼近任意有理函數[6]。因而,本文采用具有單隱含層的BP神經網絡,隱含層和輸出層分別采用對數S 型和線性激活函數,其拓撲結構如圖1 所示。
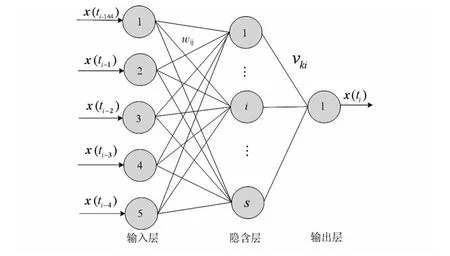
圖1 BP 網絡結構圖Fig 1 Architecture of BP neural network
輸入矢量和輸出矢量分別為
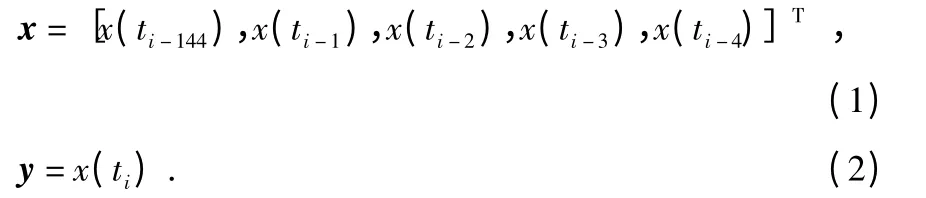
隱含層節點數是影響神經網絡性能的關鍵,太少不足以提取出樣本的內在規律,太多又會造成過度擬合。目前,關于隱含層節點數的確定在理論上還不成熟,本文根據Kolmogorov 定理[7]來確定基本節點數,并在此基礎上增加節點數進行試湊,以得到最佳隱含層節點數。
1.2.2 BP 算法
本文采用批訓練方式調整權值,定義誤差函數為

采用梯度下降法進行推導,對輸出層而言,第i 個輸入到第k 個輸出的權值和閾值變化量分別為
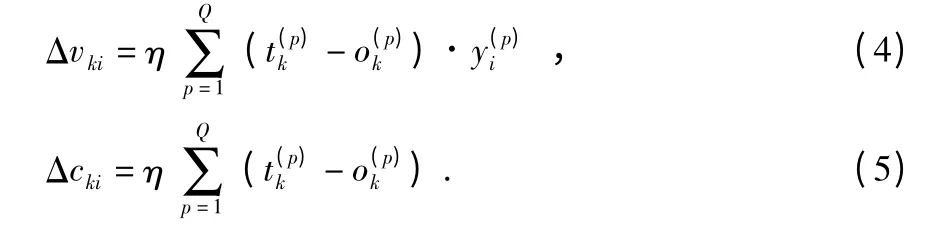
同理,隱含層第j 個輸入到第i 個輸出的權值和閾值變化量分別為
1.2.3 BP 算法改進
針對BP 算法的缺點,目前已有附加動量法、自適應學習率等一些比較成熟的改進方法[8]。以附加動量法為例,改進后的網絡權值調整公式為

其中,α(0 <α <1)是動量因子。
附加動量法積累了前一次權值調整的經驗,雖可使網絡滑過某些局部極小值,但在某些場合下仍會使網絡出現振蕩且沒有足夠能量跳出低“谷”。
2 ACO-BP 神經網絡
ACO 算法具有良好的分布式計算和全局尋優能力,并且易于與其他方法融合[9]。而對于經典ACO 算法過度搜索與抉擇困惑的問題,本文利用精英螞蟻和優化排序策略進行改進。
2.1 ACO-BP 神經網絡的策略
ACO 算法優化神經網絡主要通過改進樣本學習訓練過程實現,具體實現過程如下:
1)確定參數個數n,包括網絡中所有的權閾值。每個參數pi(i=1,2,…,n)對應一個有N 個元素的集合Ipi,這些元素為pi的可能取值。候選值個數N 并非越大越好,過多的候選值對于規避局部極小值的作用不大,反而會增加蟻群工作量,并且使神經網絡修正能力的發揮受限。
2)設置螞蟻數m,啟動所有螞蟻,每只螞蟻隨機選擇Ipi中的一個候選值,然后螞蟻按概率選擇下一個集合的某個元素,直至每只螞蟻均在n 個集合中各選擇了一個候選值。對于螞蟻k(k=1,2,…,m),其選擇Ipi中第j 個元素的概率為

其中,τj(Ipi)為集合Ipi中第j 個元素的信息素的值。為避免搜索陷入螞蟻最初產生的幾條路徑中,信息素的初始值不應太小。
3)經過上述步驟之后,m 只螞蟻構建出m 組權閾值組合,分別計算每個組合所對應的網絡輸出和誤差,并按照誤差從小到大排序,記錄本次循環最優解。當m 只螞蟻全部周游完成一次循環之后,根據下式更新信息素

其中,ρ∈(0,1)是ACO 算法中表征信息素留存能力的重要參數。ρ 太小會使收斂太快,解的質量不好;ρ 太大會增大搜索范圍,收斂太慢。考慮極限情況,令ρ=1,即不使用信息素蒸發機制,信息素就會無限積累,算法是不會收斂的。
式(10)混合了精英和優化排序策略。在優化排序策略下,輸出誤差最小的前δ 只螞蟻多釋放出的信息素的總增量為

其中,μ 為螞蟻排序號。當第μ 只螞蟻選擇了第j 個元素,其信息素的增加)為

否則為0。其中,Q 為信息素固定值;eμ為第μ 只螞蟻對應的神經網絡輸出誤差。

否則,為0。其中,e*為精英螞蟻至此找到的最優解對應的輸出誤差。
4)重復步驟(2),(3),直到輸出誤差滿足ACO 算法要求或者循環次數達到上限。
5)將蟻群最終搜索到的權閾值組合作為神經網絡的初始值,利用BP 算法訓練網絡,進一步修正權閾值,直到滿足要求。
2.2 程序流程圖
基于以上ACO—BP 神經網絡的過程,得出如圖2 所示的優化算法的整體流程圖。
3 應用實例
利用天津某辦公大樓的實際交通流數據進行分析,統計該辦公大廈周一~周五共5 個工作日內每天7:00~19:00 每5 min 內進出大樓的總乘客數,共得到720 個數據。
由于隱含層的S 型函數對零點附近的輸入信號放大程度較好,而當凈輸入較大時,神經元的輸出將趨于飽和,放大效果不是很明顯。因而需要將這720 個數據統一歸一化到區間[0,1]中,即得到樣本數據。
3.1 各層節點數的確定
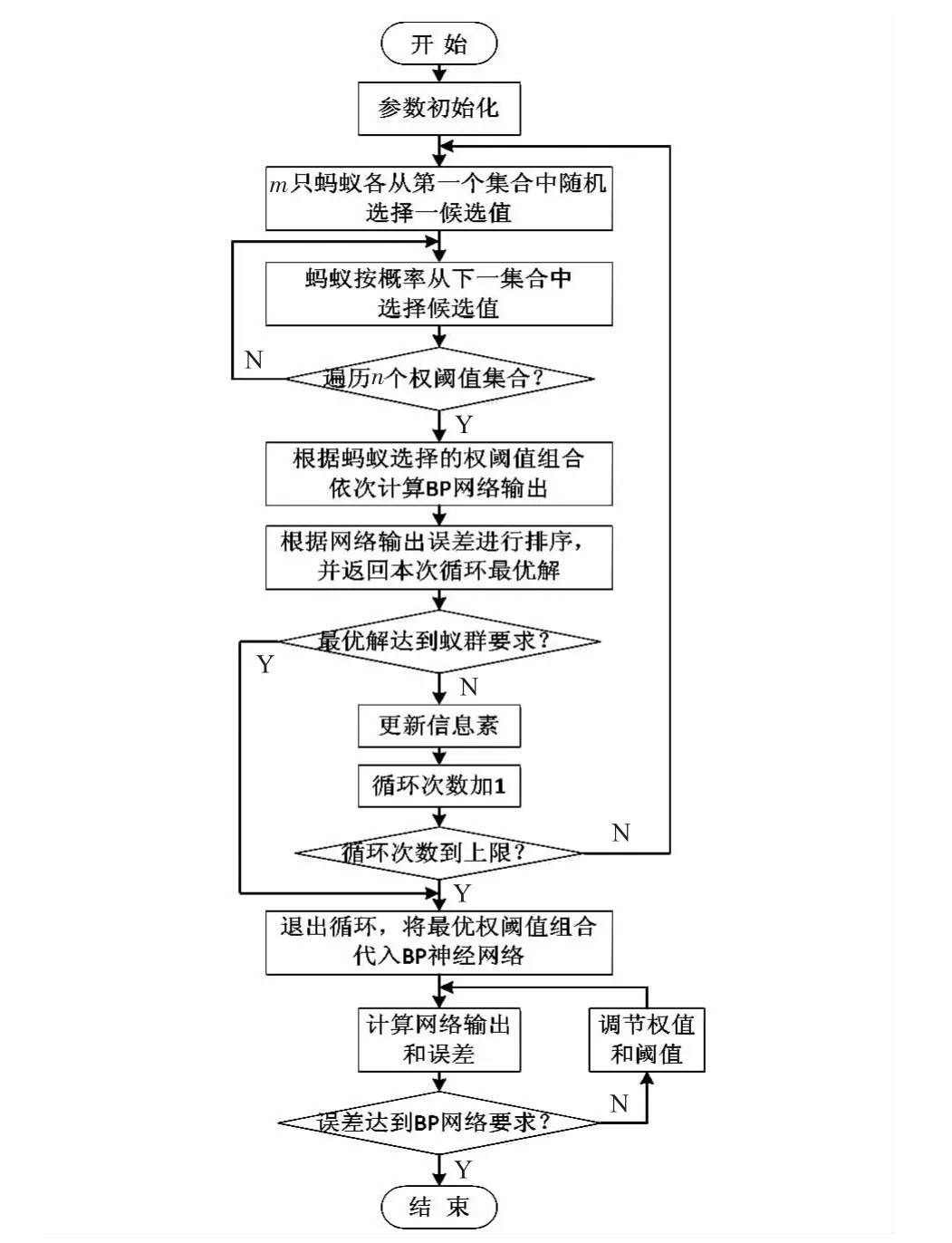
圖2 ACO—BP 網絡算法流程圖Fig 2 Flow chart of ACO—BP neural network algorithm
對于電梯交通流而言,t 時刻的交通流與當天前2 個時刻以及前天同一時刻的交通流相關性最大。為了更好地反映交通流的變化以及數據間的內在聯系,如圖1 所示,本文利用當天前4 個時刻和前天同一時刻的交通流來預測當天某一時刻的交通流,即輸入節點數為5,輸出節點數為1,由此,確定基本隱含層節點數應為11,然后,在此基礎上加上一些余量進行試湊。
表1 給出了當誤差目標為0.01,采用BP 算法訓練時,具有不同隱含層節點數的網絡所需的訓練時間與循環次數,可知隱含層節點數取13,15 為最佳,本文取13。

表1 網絡訓練結果Tab 1 Network training results
3.2 仿真分析
確定網絡權閾值參數個數為92,將區間[-5,5]等分為100 份,利用Matlab 中rands()函數在每個小區間中隨機產生一個數作為候選值,最終每個參數對應一個有100 個候選值的集合;經過反復的匹配與調整,最終選定100 只螞蟻,信息素留存系數ρ 取0.8,信息素初始值取8 000,σ 取20,Q 取1。
取前4 天的數據作為訓練樣本,第五天的數據作為測試樣本,由此可得到572 組訓練樣本和144 組測試樣本,編制m 文件分別對基于BP 與ACO—BP 神經網絡的電梯交通流預測模型進行仿真分析,并對傳統的BP 算法利用附加動量法進行改進。設置最大迭代次數為40 000,均方差目標為0.002,為了弱化隨機性的影響,分別運行3 次,對比最終的訓練誤差,結果如圖3 所示。

圖3 三次運行結果對比Fig 3 Comparison of three running results
由圖3 可知,3 次運行中,傳統的BP 神經網絡即使經過附加動量法改進之后仍然全部陷入了0.003 93 這個極小值點;而ACO—BP 神經網絡3 次全部達到訓練誤差要求0.002。
取其中一次的運行結果進行對比分析,具體結果如表2所示;圖4 ~圖7 所示分別為傳統BP 和ACO-BP 神經網絡的訓練誤差性能曲線和模型預測擬合曲線。
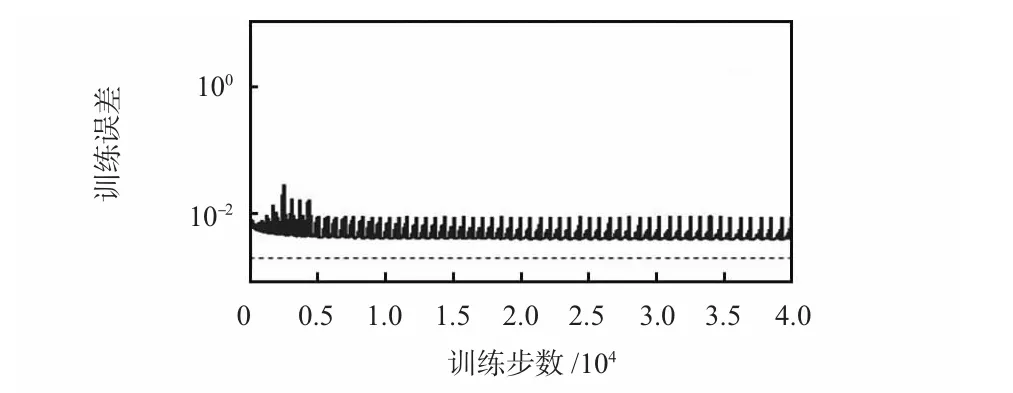
圖4 傳統BP 神經網絡的訓練誤差性能曲線Fig 4 Training error performance curve of BP neural network
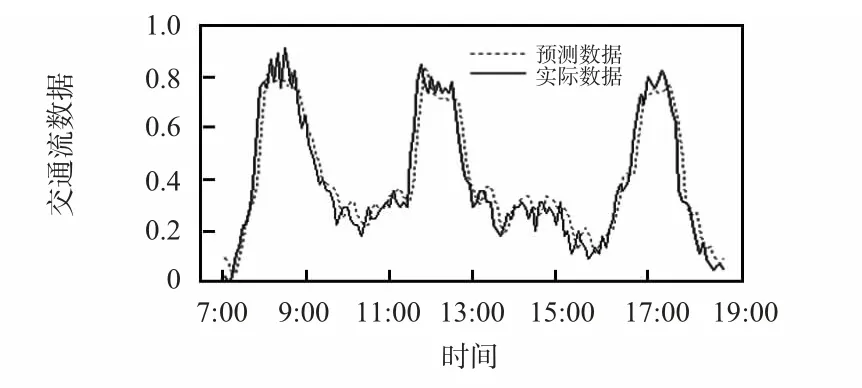
圖5 傳統BP 神經網絡模型的預測和擬合曲線Fig 5 Forecasting and fitting curve of traditional BP neural network model
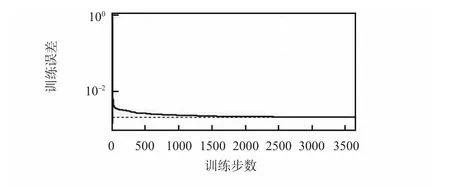
圖6 ACO—BP 神經網絡的訓練誤差性能曲線Fig 6 Training error performance curve of ACO—BP neural network
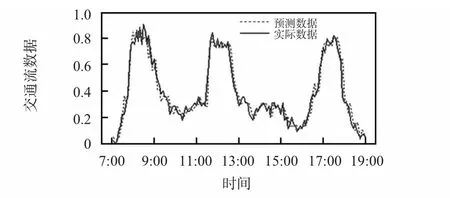
圖7 ACO—BP 神經網絡模型的預測和擬合曲線圖Fig 7 Forecasting and fitting curve of ACO—BP neural network model
圖4 所示訓練過程耗時447 s,在開始的5 000 步,網絡在跳過某些局部極小值之后,誤差由初始值1.18 降到0.004左右,之后網絡便陷入了一個長達3 0000 多步的振蕩過程,并且最終誤差只達到0.003 93,此時網絡完全陷入這個局部極小值。對比圖6,整個訓練過程耗時88 s,初始誤差僅為0.276,只用3 638 步就達到誤差目標0.002,并且整個訓練過程很平滑,未受到局部極小值的影響。
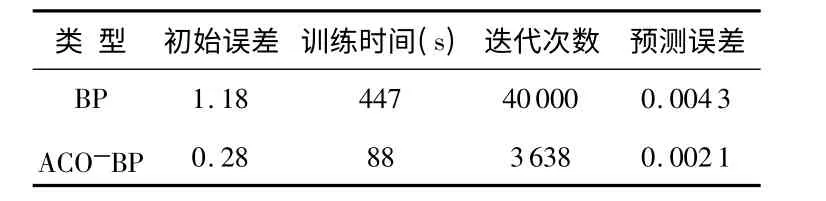
表2 ACO—BP 與BP 神經網絡預測結果對比Tab 2 Prediction results comparison of ACO—BP and BP neural network
對比圖5 和圖7 可知,二者均可以較好地預測交通流的變化趨勢,對于客流高峰時段的預測也都在合理范圍內。但二者的預測精度是有差別的,圖5、圖7 的預測誤差分別為0.004 3和0.002 1,而且圖7 的預測曲線能很好地反映交通流短時間內很小的變化。
綜上所述,ACO—BP 神經網絡不但克服了傳統BP 神經網絡的局部極小值問題,而且在訓練時間和預測精度上也有優勢。
4 結束語
本文在建立的基于BP 神經網絡交通流預測模型的基礎上,針對BP 算法的缺點,提出ACO—BP 算法,該方法兼具ACO 算法全局尋優和BP 網絡廣泛映射等優點;采集天津某辦公大廈的實際交通流數據對建立的ACO—BP 神經網絡交通流預測模型進行仿真,結果表明:ACO—BP 神經網絡訓練時間短、預測精度高,這可為電梯配置與群控提供更為準確的交通流信息。
[1] 萬健如,張彥朝,楊岳楓.電梯選型配置與優化設計研究[J].中國電梯,2009,20(21):21-26.
[2] Ding Bao,Zhang Yongming,Peng Xiyuan,et al.A hybrid approach for the analysis and prediction of elevator passenger flow in an office building[J].Automation in Construction,2013,35:69-78.
[3] 唐海燕,于德亮,丁 寶,等.基于SVR 的電梯交通流時間序列預測[J].控制工程,2011,18(5):723-726,792.
[4] 黃 敏,崔寶同,顧樹生.基于小波神經網絡的電梯交通流預測[J].控制與決策,2006,21(5):589-592.
[5] 張曉利,陸化普.非參數回歸方法在短時交通流預測中的應用[J].清華大學學報:自然科學版,2009,49(9):39-43.
[6] 王旭東,劉金鳳,張 雷.蟻群神經網絡算法在電動車用直流電機起動過程中的應用[J].中國電機工程學報,2010,30(24):95-100.
[7] 徐華中,吳 蘇,劉 念.基于多傳感器數據融合技術的短時交通流檢測[J].傳感器與微系統,2009,28(2):104-106,109.
[8] 田秀梅.BP 算法的改進及仿真研究[J].電子技術,2011,38(3):60,64-65.
[9] Mavrovouniotis Michalis,Yang Shengxiang.Evolving neural networks using ant colony optimization with pheromone trail limits[C]∥Proceedings of the 13th UK Workshop on Computational Intelligence,Piscataway:IEEE,2013:16-23.
猜你喜歡
課堂內外(小學版)(2024年5期)2024-05-29 00:00:00
中國品牌(2019年10期)2019-10-15 05:57:12
故事大王(2018年3期)2018-05-03 09:55:52
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
知識就是力量(2017年9期)2017-10-13 23:35:31
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
紅蜻蜓·低年級(2015年11期)2015-04-29 00:00:00
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
發明與創新(2015年33期)2015-02-27 10:40:04