高旋彈用慣性測量系統多量程傳感器組合設計*
2015-04-01 12:19:10劉秀鋒侯利朋劉一鳴
傳感器與微系統 2015年11期
劉秀鋒,李 杰,2,侯利朋,劉一鳴,劉 俊,2,陳 偉
(1.中北大學 電子測試技術國防科技重點實驗室,山西 太原030051;2.中北大學 儀器科學與動態測試教育部重點實驗室,山西 太原030051;3.山西北方惠豐機電有限公司 科研設計二所,山西 長治046012)
0 引 言
在當今現代化高技術戰爭中,慣性制導系統應用于常規武器彈藥實施精確打擊有著不可替代的特殊地位,慣性制導武器大都依靠慣性測量系統測出載體的位置、速度和姿態等參數,通過計算機處理,形成制導指令信息傳送給控制系統,對飛行軌跡不斷進行調整,直到命中目標,所以,慣性測量系統的測量精度是決定武器系統能否精確打擊的決定性因素之一。
然而在高速旋轉環境下,載體的轉速和加速度變化范圍很大,尤其是在飛行初期,具有高轉速、高加速度和高過載的特點,在此情況下,由于電機受到變參數等因素影響,電機超調和滯后很大[1],使得微慣性測量單元(microinertial measurement unit,MIMU)測得瞬時數據超過其量程,致使缺失數據無法實時解算。
基于上述影響因素,本文采用多量程的MEMS 慣性傳感器與MIMU 組合測量彈體的各個飛行階段的信息,將各量程的數據組合解算,得出彈體各個階段的姿態、速度和位置信息[2]。
1 系統工作原理
半捷聯慣性測量系統與被測彈體在俯仰和偏航方向捷聯,滾轉方向不捷聯,由電機驅動慣性測量系統相對載體反轉,形成一個“減旋”系統,該系統使滾轉軸向所敏感到的角速率遠小于彈體實際角速率,能有效隔離載體擾動,實現小量程高分辨率MEMS 慣性傳感器測量高轉速武器彈藥的轉速信息[3],其總體組成結構由半捷聯機械結構部分、控制驅動部分和測試采集存儲部分組成,系統的總體組成結構示意圖如圖1 所示。將60 r/s 量程陀螺(以下簡稱大陀螺)安裝在彈體的軸向上,實時測量高速旋轉武器彈藥的角速率,并傳入電機控制電路,將采集得到的轉速信號實時轉換為無刷直流電機的控制信號脈寬調制(PWM)脈沖,通過驅動器控制電機與高速旋轉武器彈藥的相反的角速率旋轉,實現減旋的目的,系統工作原理圖如圖2 所示。微慣性測量單元(micro inertial measurement unit,MIMU)與電機軸向捷聯,此時用于敏感載體姿態信息的MIMU 處于低轉速的環境中,這樣就可以將低量程高精度的MEMS 陀螺儀應用于慣性測量,提高慣性測量的精度[4]。

圖1 系統總體組成結構示意圖Fig 1 Diagram of system overall structure as a whole
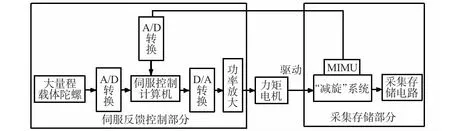
圖2 系統工作原理框圖Fig 2 Working principle block diagram of system
2 總體設計原理
2.1 硬件總體設計原理
該系統通過MIMU 敏感彈體的姿態信息,采用現場可編程門陣列(FPGA)控制A/D 轉換器采集MIMU 數據并將其轉換為數字信號,然后傳輸到FPGA 中,FPGA 將采集到的數據以一定格式編碼,最終存儲到FLASH 中,這些模塊統稱為采集存儲模塊(以下簡稱采存模塊),實現彈體發射到落地過程中飛行參數的實時準確記錄[5],因此,采存模塊是常規彈藥飛行參數測試的重要組件。
由于所用采存模塊為6 通道采集存儲,所以,該系統用2 個采存模塊,分別為采存模塊A 采集MIMU 的6 路數據,采存模塊B 采集大量程的加速度計和陀螺儀,如圖3 所示。當飛行初始時刻系統瞬時具有高加速度和高轉速,電機滯后很大,所測數據超過MIMU 量程,此時采用大量程加速度計和陀螺儀數據,當載體轉速不斷下降,電機工作于低速狀態,趨于穩定,此時采用MIMU 數據,將各量程的慣性傳感器的數據組合得到彈體的各個階段的飛行數據。
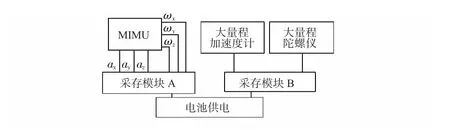
圖3 系統硬件設計原理圖Fig 3 Hardware design principle diagram of system
2.2 A/D 轉換模塊設計
TI 公司的ADS8365 主要特點有:6 通道并行輸入;芯片內部具有可選的FIFO 工作模式;16 位的A/D,采集精度高;正常工作時功耗儀為200 mW,功耗低。
ADS8365 有6 個模擬輸入通道,分為A,B,C 三組,每組包括2 個通道,分別由/HOLDA,/HOLDB,/HOLDC 啟動A/D 轉換。ADS8365 的時鐘信號由外部提供,轉換時間為20 個時鐘周期,最高頻率為5 MHz,在5 MHz 的時鐘頻率下,每個通道的總的轉換時間為4 μs。數據輸出方式很靈活,分別由BYTE,ADD 與地址線A2,A1,A0 的組合控制。轉換結果的讀取方式有三種:直接讀取、循環讀取和先進先出(first in first out,FIFO)方式[6]。
2.3 FPGA 控制模塊設計
本系統中采用的 FPGA 是 Xilinx 公司生產的XC2S30E,XC2S30E 是Spartan—ⅡE 系列產品中的一種。由于這種FPGA 采用了低內核電壓,這將從根本上減小芯片功耗,從而解決高速工作狀態下發熱量大的問題。同時其豐富的門陣列資源,也為復雜控制邏輯的實現提供了可能[7]。本設計采存模塊中主要用其進行時序邏輯控制,實現信號采集、存儲等功能。A/D 轉換器,FLASH 的所有控制引腳均與XC2S30 相連,為XC2S30 作為系統核心提供硬件基礎。通過輸出控制信號使得A/D 轉換器采集慣性信息敏感倉中MIMU 輸出的加速度和角速度信息,進而將數據在XC2S30 內部容量為1kB 的FIFO 中緩存。XC2S30 通過模擬RS—232 串行通信接口發送轉換后的數字量,其經過滑環傳輸后再由慣性信息采集倉中XC2S30 模擬的串行通信接口接收數字量并將整合后的數據存儲到FLASH 中。使用FPGA 作為A/D 轉換器和FLASH 的控制器,其高速的數據處理速度與控制速度可以滿足系統高采樣率和處理速度的要求[8]。
2.4 FLASH 存儲模塊設計
FLASH 選取的是K9F2G08,用于存儲采集到的數據,其工作電壓為3.3 V,如圖4 所示為電路原理圖。

圖4 FLASH 存儲模塊電路圖Fig 4 Circuit diagram of storage module of FLASH
SD0~SD7 為數據接口,WE 為寫選通;R/B 為READY/BUSY OUTPUT(空閑/忙),當輸出為高電平,表示空閑;當輸出為低電平,表示忙;WP 為寫保護。RDB1,WDB2 為存儲時WDB2 導通,由采存端F3.3 供電,RDB1 兩端無電壓;讀數時RDB1 導通,由讀數端R3.3 供電,WDB2 兩端無電壓;FC1~FC8,U12C1~U12C 為去耦電容器。去耦電容器在集成電路電源和地之間有兩個作用:一方面是本集成電路的蓄能電容;另一方面旁路掉該器件的高頻噪聲[9]。
3 實驗驗證
將半捷聯慣性測量系統置于高速飛行仿真轉臺上模擬高速旋轉的武器彈藥飛行試驗(如圖5 所示),實驗過程系統偏航角始終保持0°,俯仰角從45°勻速變到-45°滾轉軸轉速圖如圖6 所示。
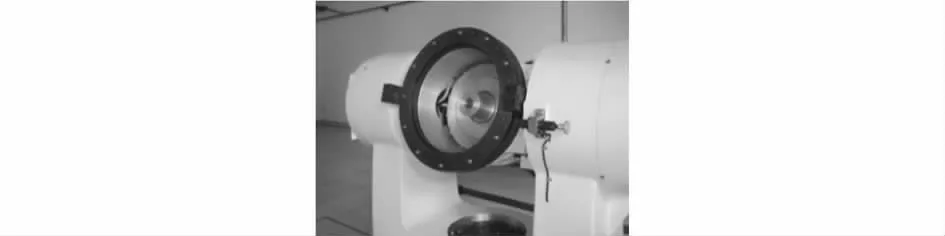
圖5 高速飛行仿真轉臺實驗Fig 5 Experiment of high speed flight simulation turntable
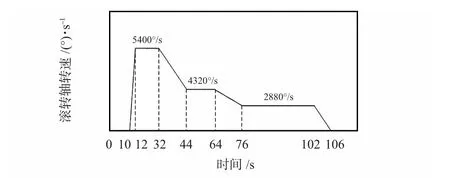
圖6 滾轉軸轉速圖Fig 6 Revolving speed diagram of wobble shaft
通過對實驗數據進行上位機讀取,首先分析了原始數據的正確性。由于所用MIMU 陀螺x 軸量程為300°/s,飛行初始階段測得數據超過其量程,轉速如圖7 所示。

圖7 超量程轉速圖Fig 7 Revolving speed diagram of over-range
通過相關姿態算法解算,得到半捷聯慣性測量系統在高速飛行仿真轉臺試驗中的姿態信息如圖8 所示。
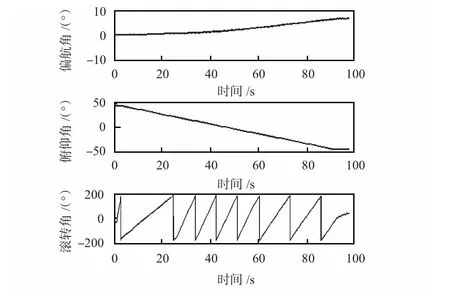
圖8 系統的姿態信息Fig 8 Attitude information of system
將超量程數據進行組合后,通過Matlab 軟件可以繪制出x 軸的角速率信息圖,如圖9 所示。
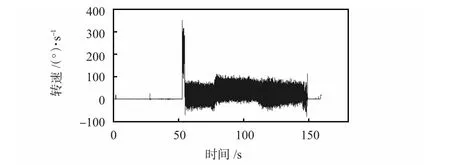
圖9 組合數據轉速圖Fig 9 Revolving speed diagram of combined data
由相關姿態算法解算,得到半捷聯慣性測量系統組合數據的姿態信息如圖10 所示。
試驗過程中偏航角保持不變,由所測數據超量程時,解算可得出系統在80 s 時的偏航姿態角誤差為5°。對系統數據進行組合后由圖可得出系統在80 s 時的偏航姿態角誤差為0.6°。該試驗結果表明,該系統能很好的彌補武器彈藥初始飛行時刻的慣性傳感器超量程問題,提高慣性測量系統的精度,能完整準確的記錄半捷聯慣性測量系統的姿態信息。
4 結束語
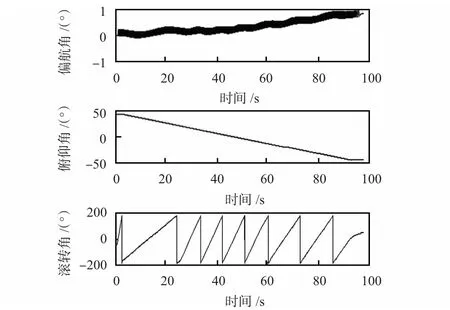
圖10 改進系統的姿態信息Fig 10 Attitude information of modified system
本系統采用多量程的慣性傳感器和MIMU組合將彈體各個飛行階段的數據進行測量,通過FPGA 模擬通信口接收數據并存儲在FLSAH 中,實現對半捷聯慣性測量系統的實時記錄,能很好地解決武器彈藥飛行初始時刻慣性傳感器超量程問題,通過高速飛行仿真轉臺組合數據分析處理實驗驗證,該設計能實時準確采集并存儲彈體各個飛行階段的信息,對試驗過程中系統的飛行姿態、位置、速度等相關參數的準確分析具有重要的意義,對常規彈藥的制導化具有很大的應用價值。
[1] 李 杰,劉 俊,張文棟.微慣性測量裝置[J].儀器儀表學報,2006,27(6):1450-1451,1462.
[2] 李 杰,馬 幸,劉 俊,張文棟.小型慣導系統數據實時采集處理與存儲設計[J].中國慣性技術學報,2008(6):274-277.
[3] 朱海榮,李 奇,顧菊平.擾動補償的陀螺穩定平臺單神經元自適應PI 控制[J].電機與控制學報,2012,16(3):34-36.
[4] 李 杰,洪惠惠,張文棟.MEMS 微慣性測量組合標定技術研究[J].傳感技術學報,2008(21):1169-1173.
[5] 岳鳳英,高松山.MEMS 慣性測量組合在無人機飛行參數測量中的應用[J].火力與指揮控制,2009(34):174-176.
[6] 趙位樺,姜 力,趙大威.基于DSP 的多自由度假手電氣控制系統的研究[J].傳感器與微系統,2008,27(1):118-120.
[7] 張 松,李 杰.半捷聯MEMS 慣性測量裝置數據硬回收系統設計[J].傳感技術學報,2013,26(9):1219-1223.
[8] 張少華,李錦明,蘇樹清.基于FPGA 的雙光幕測速系統設計與實現[J].傳感器與微系統,2015,34(2):92-94.
[9] 楊志勇,文 豐,郝曉劍.基于Flash 存儲器的抗高過載電子記錄器關鍵技術研究[J].國外電子測量技術,2009,28(7):27-29.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46