一種MEMS 陀螺儀的標定方法研究
2015-04-01 12:19:06吳雪娟宋艷君黃樹峰張國綱
傳感器與微系統 2015年11期
關鍵詞:模型
吳雪娟,宋艷君,黃樹峰,張國綱,盧 剛
(1.空軍工程大學 工程學院,陜西 西安710038;2.陜西華燕航空儀表有限公司,陜西 漢中723102)
0 引 言
陀螺儀是慣性測量單元中的核心器件,決定了整個慣性測量單元的工作精度。隨著微機電系統(micro-electromechanical system,MEMS)技術的發展,MEMS 陀螺儀在慣性導航、軍事及民用領域得到了廣泛應用,是慣性器件未來發展的方向之一[1]。相對于傳統的機械陀螺,MEMS 陀螺儀具有體積小、重量輕、成本低、功耗低、可靠性好、抗過載能力強等優點。但是,MEMS 陀螺儀的精度較低,誤差來源也較多,這將對微慣性導航系統的導航精度產生很大影響。因此,在使用前必須對陀螺進行標定,為各項誤差系數建立誤差模型,設計模型參數辨識算法,通過軟件進行誤差實時補償以提高陀螺儀的測量精度。
本文以實驗室某型號MEMS 陀螺儀為研究對象,利用多功能三軸轉臺對其進行標定試驗。通過對MEMS 陀螺儀進行誤差分析,建立準確的誤差模型,設計了速率標定方法。利用小波閾值去噪法和軟件補償,提高了陀螺儀的使用精度。
1 MEMS 陀螺儀誤差模型的建立
由于MEMS 陀螺儀受自身結構特點、工藝制造水平及工作原理限制,會引起質心偏移、非等慣性力矩等誤差,且存在各種干擾因素。另外,陀螺儀在制造與安裝的過程中,因無法保證三軸之間的絕對正交,從而會引入安裝誤差。因此,MEMS 陀螺儀數據輸出的主要誤差包括零偏、標定因數、安裝誤差、隨機誤差等。
MEMS 陀螺儀的誤差對整個微慣導系統的精度產生影響,其主要表現在陀螺的零偏、標度因數、安裝誤差的影響。由于MEMS 陀螺儀精度相對比較低,每小時達到幾十度每秒的漂移,因此,可以把誤差二次項忽略掉,減少了計算量。又考慮工程的實用性,本文根據所選用的MEMS 陀螺儀的誤差傳播機理,在常溫下對其進行誤差建模[2]。
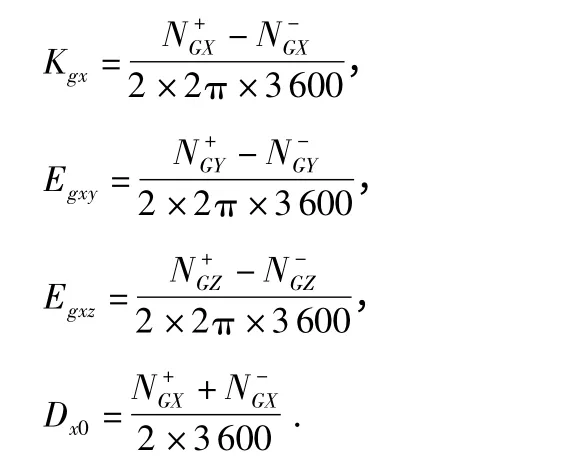
MEMS 陀螺儀采用如下簡化的誤差數學模型[3]

式中 Δθx,Δθy,Δθz為采樣周期內三個軸向X,Y,Z 的輸入角增量;Ngx,Ngy,Ngz為對應三個軸X,Y,Z 上陀螺采樣周期內輸出的脈沖信號數目;Dx0,Dy0,Dz0為對應三個軸X,Y,Z上陀螺的零偏;Kgx,Kgy,Kgz為對應三個軸X,Y,Z 上陀螺的標度因數;Egyx,Egzx,Egxy,Egzy,Egyz,Egxz分別為三個軸X,Y,Z上陀螺的安裝誤差系數。
2 MEMS 陀螺儀誤差模型辨識試驗方案設計
2.1 MEMS 陀螺儀標定方案
本文對MEMS 陀螺儀使用速率試驗的方法進行標定。根據微慣導系統的實際應用情況,選擇5°/s 的轉臺輸入角速率,控制系統繞著三軸分別進行正反勻速旋轉整圈,這樣既方便后續的參數計算,又抵消了地球自轉角速率。進行該試驗的目的是對MEMS 陀螺儀的零偏、標度因數、安裝誤差進行標定。實驗步驟如下:
1)將基于數字信號處理器(DSP)的微型慣性測量單元(miniature inertial measurement unit,MIMU)捷聯慣性導航系統固定于轉臺臺面中心,使得MIMU 的X,Y,Z 軸依次指向天、東、北方向;
2)給系統上電,控制轉臺位置使得MIMU 的OX 軸沿當地垂線向上,OYZ 平面分別與當地水平面平行;
3)待轉臺靜止后,設置三軸轉臺控制為角度增量方式,角增量為360°,角速率為5°/s,轉臺開始順時針轉動一圈,期間采集數據;
4)完成步驟(3)后,設置三軸轉臺的角增量為-360°,轉臺開始逆時針轉動一圈,期間采集數據;
5)同步驟(2)~(4),控制轉臺的位置使得OY 軸、OZ軸分別沿當地垂線向上,OXZ,OXY 平面分別與當地水平面平行,再繞軸進行順時針和逆時針旋轉一圈,并采集數據,完成6 個位置的數據采集過程。
2.2 MEMS 陀螺儀誤差模型參數辨識
MIMU 的速率試驗結束后,對采集到的陀螺輸出數據進行處理,即誤差模型參數辨識的過程如下:
1)對各軸向的MEMS 陀螺儀在每個位置采集的所有數據進行累加,得到轉臺轉動一圈的輸出值。
規定三軸轉臺逆時針轉動為正,順時針轉動為反。控制轉臺使其在相同時間內分別繞系統OX,OY,OZ 軸分別正反轉動360°,將X,Y,Z 陀螺累積輸出脈沖數分別記為
2)將由過程(1)得到的MEMS 陀螺儀6 個位置的試驗數據代入其誤差模型中進行參數辨識。以系統X 軸指天時,轉臺分別以5°/s 的速率順時針、逆時針轉動一圈為例。
根據測得的數據、轉臺的角速率及陀螺誤差模型,可以得到X 軸向陀螺的標度因數、零偏及其相對于Y,Z 軸向陀螺安裝偏角分別為[4]
類似的,系統Y,Z 軸指天時,轉臺分別以5°/s 的速率順時針、逆時針轉動一圈時,可以標定出參數Kgy,Kgz,Egyx,Egzy,Egzx,Egyz,Dy0,Dz0。
3 試驗驗證與分析
利用通過上述的標定方法在多功能三軸轉臺上進行試驗,利用Matlab 進行誤差模型參數的解算,其標定結果如表1 所示。

表1 MEMS 陀螺誤差標定結果Tab 1 Error calibration result of MEMS gyro
表1 中各參數的單位分別為:各軸輸出誤差模型的零偏為(°)/pulse;標度因數為(°)/pulse;安裝誤差為(')。
MEMS 陀螺儀輸出的數據中存在著各種誤差,主要分為確定性誤差和隨機誤差,利用標定試驗的結果對確定性誤差通過誤差模型逆推的算法[5]加以補償。經過大量仿真對比分析,本文采用5 層分解的sym6 小波基,按缺省軟閾值[6]的處理方式對隨機誤差進行處理,從而抑制MEMS 陀螺儀的輸出噪聲,進一步提高了MEMS 陀螺儀的使用精度。
由于3 個軸向的陀螺儀誤差模型和參數求解方法類似,則其補償效果也類似。因此,此處僅以Y 軸向的陀螺儀為例進行分析。誤差補償結果與小波濾波效果分別如圖1、圖2 所示。
從仿真圖形可以看出:標定補償前后MEMS 陀螺儀的輸出波動趨勢幾乎一致,基本在理想值的附近波動,同時濾波效果也較明顯,對隨機游走、零偏不穩定性及其他各噪聲項也有所提高。補償前Y 軸向上的陀螺儀測得的角速度在X,Z 軸上的分量(安裝誤差)分別為0.709 9',0.963 1',補償后為-0.006 4',-0.017 2';Y 軸向補償前的線性度為1.748 8%,補償后為0.924 0%;零偏不穩定性補償前為0.472 4°/s,補償后為0.029 31°/s。
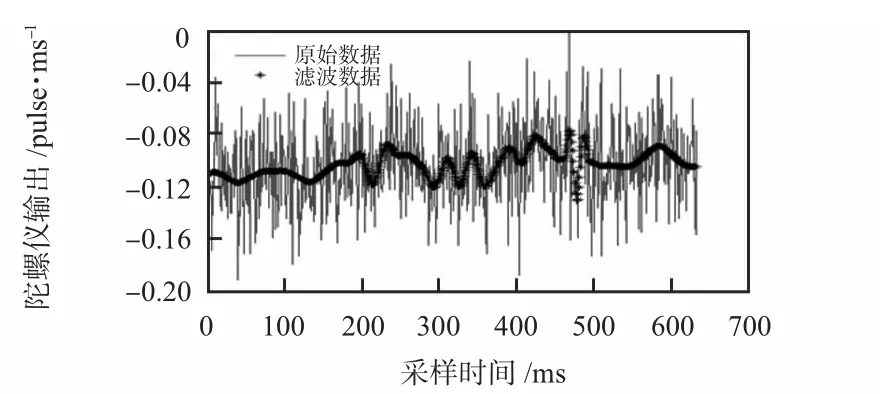
圖1 陀螺Y 軸補償前輸出原始數據與濾波數據Fig 1 Output original data and filtering data of gyro in Y axis before compensation
綜上分析可知,經誤差補償和小波閾值濾波后,MEMS陀螺儀的零偏、安裝誤差、隨機漂移等均得到了改善,提高了1 ~2個數量級,從而提高了MEMS陀螺儀的測量精度和慣導系統的精度。
4 結束語
本文提出的MEMS 陀螺儀標定方法可以很好地標定出陀螺儀的零偏誤差、標度因數及安裝誤差等參數,實現對陀螺儀的實時補償。采用該方法在常溫下對MEMS 陀螺儀進行標定試驗,其測量精度提高了1~2 個數量級。另外,針對MEMS 慣性器件產生的隨機誤差,通過加入小波濾波器的方法進行處理,從而達到去噪的效果,進一步提高了陀螺儀的工作精度,從而提高了慣導系統的精度。
[1] 李建利,房建成.改進的MEMS 陀螺靜態誤差模型及標定方法[J].宇航學報,2007,28(6):1614.
[2] 嚴恭敏,李四海,秦永元.慣性儀器測試與數據分析[M].北京:國防工業出版社,2012.
[3] 周 琪,秦永元.激光捷聯慣性組件精確標定方法研究[J].測控技術學報,2008,27(9):95-97.
[4] 宋麗君,秦永元.MEMS 陀螺儀的一種實用標定法[J].壓電與聲光,2010,32(3):372-374.
[5] 彭孝東,陳 瑜,李繼宇,等.MEMS 三軸數字陀螺儀標定方法研究[J].傳感器與微系統,2013,32(6):63-65.
[6] 宋麗君,秦永元,楊鵬翔.小波閾值去噪法在MEMS 陀螺儀信號降噪中的應用[J].測試技術學報,2009,23(1):34-36.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19