一種新型工業(yè)機(jī)器人六維力傳感器設(shè)計(jì)研究*
2015-03-27 07:52:56趙克轉(zhuǎn)徐澤宇
傳感器與微系統(tǒng) 2015年5期
關(guān)鍵詞:變形
趙克轉(zhuǎn),徐澤宇
(中國(guó)科學(xué)院 重慶綠色智能技術(shù)研究院,重慶400714)
0 引 言
六維力傳感器是提高機(jī)器人智能化水平和作業(yè)水平的重要部件[1],它能同時(shí)檢測(cè)三維空間的全力信息,即3 個(gè)力分量和3 個(gè)力矩分量。雖然國(guó)內(nèi)外使用六維力傳感器已有多年的歷史,但其性能和使用上至今仍然存在著一些問(wèn)題[2],突出表現(xiàn)在以下兩方面:一是部分傳感器設(shè)計(jì)的體積或尺寸過(guò)大,影響機(jī)器人性能的發(fā)揮;二是部分傳感器存在維間耦合,解耦性不好,嚴(yán)重影響機(jī)器人末端執(zhí)行器的工作精度。有時(shí)候這兩方面甚至互為矛盾,相互制約。
為了減少直至消除此種影響,本文嘗試提出一種可用于工業(yè)機(jī)器人的新型六維力傳感器,針對(duì)其結(jié)構(gòu)形式,在理論上分析其測(cè)量原理和結(jié)構(gòu)解耦特性,進(jìn)而采用數(shù)值模擬方法,運(yùn)用Hyperworks 和Adams 建立傳感器仿真模型,深入研究傳感器各組構(gòu)的力學(xué)性能。
1 新型結(jié)構(gòu)形式
新型六維力傳感器采用整體式結(jié)構(gòu),如圖1 所示。其中,側(cè)梁和筒體、十字梁和圓臺(tái)、圓臺(tái)和筒體為一體式結(jié)構(gòu),加載臺(tái)和側(cè)梁、十字梁和側(cè)梁則通過(guò)彈性球鉸連接在一起。目前,國(guó)內(nèi)外常用的彈性鉸鏈幾何轉(zhuǎn)角有圓弧形、拋物線形、橢圓形、直梁形、雙曲線形等[3]。基于該傳感器彈性梁的運(yùn)動(dòng)精度和范圍,選用橢圓形幾何轉(zhuǎn)角的球鉸作為彈性連接件。
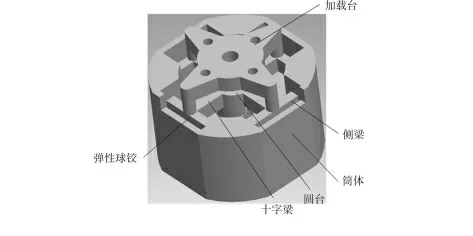
圖1 新型傳感器結(jié)構(gòu)局部剖視圖Fig 1 Local section view of new type sensor structure
相比傳統(tǒng)十字梁型六維力傳感器的測(cè)力(矩)方式,在該新型結(jié)構(gòu)中,圓臺(tái)以往的加載功能變換為承載十字梁的功能,加載臺(tái)則成為施力(矩)部件。加載時(shí)載荷可分散到加載臺(tái)周?chē)? 個(gè)傳力支腳上,并經(jīng)支腳下短圓柱體傳遞到十字梁和側(cè)梁的交接處,從而完成載荷的傳遞。同時(shí)受載彈性體也由傳統(tǒng)單獨(dú)的十字梁變?yōu)榻M合形式的十字梁和側(cè)梁,直接受載部位也由以往十字梁中心變?yōu)槭至汉蛡?cè)梁的交接部位。
2 測(cè)量原理與解耦特性分析
電阻應(yīng)變式測(cè)力原理是目前廣義六維力傳感器中應(yīng)用最多的一種[4],其核心元件為貼裝在傳感器彈性梁上的由敏感柵等構(gòu)成的電阻應(yīng)變片。根據(jù)該測(cè)量原理,本文擬在圖1 所示結(jié)構(gòu)的十字梁和側(cè)梁上共貼裝32 片電阻應(yīng)變片,其編號(hào)分別為1~32。十字梁結(jié)構(gòu)上的貼裝位置為靠近圓臺(tái)的4 個(gè)梁的兩側(cè)面及上下面,兩側(cè)面分別貼裝應(yīng)變片9~16,上下表面分別貼裝應(yīng)變片1~8;側(cè)梁結(jié)構(gòu)上的貼裝位置為靠近彈性鉸鏈的梁的兩側(cè)面和上下面,兩側(cè)面分別貼裝應(yīng)變片17,18,21,22,25,26,29,30,上下面分別貼裝應(yīng)變片19,20,23,24,27,28,31,32。具體貼裝情況如圖2 所示,圖中括號(hào)內(nèi)編號(hào)為下表面應(yīng)變片,對(duì)應(yīng)的無(wú)括號(hào)為上表面應(yīng)變片。
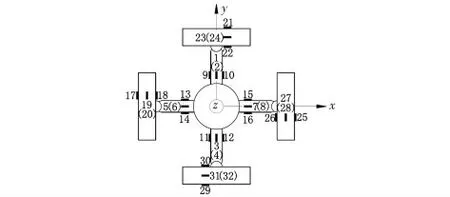
圖2 電阻應(yīng)變片貼裝示意圖Fig 2 Mounting diagram of resistance strain gage
方便起見(jiàn),建立如圖2 所示的傳感器三維直角坐標(biāo)系(后文仿真坐標(biāo)系同此),其中x,y 軸沿十字梁方向,z 軸符合右手坐標(biāo)法則。同時(shí)定義沿傳感器x,y,z 向的力分別為Fx,F(xiàn)y,F(xiàn)z,繞x,y,z 向的力矩分別為Mx,My,Mz。根據(jù)傳感器受載時(shí)各應(yīng)變片產(chǎn)生的應(yīng)變形式,搭建基于六維分量的全橋惠斯通電路,其中載荷Fx,F(xiàn)y,F(xiàn)z,Mx,My,Mz對(duì)應(yīng)的電橋電壓分別為U1,U2,U3,U4,U5,U6。在該全橋惠斯通電路中,橋壓U1,U2,U3,U4,U5,U6所包含的組橋應(yīng)變片分別為(17,18,25,26),(21,22,29,30),(1~8),(23,24,31,32),(19,20,27,28)及(9~16),具體的惠斯通電路形式可參見(jiàn)文獻(xiàn)[5]。從組橋方式來(lái)看,各橋路中選用的應(yīng)變片互不相同,橋路獨(dú)立性好,即各橋路所對(duì)應(yīng)的傳感器六維力分量之間解耦性好。記傳感器的各維力分量為F,需標(biāo)定參數(shù)為K,各橋路電壓為U,則有

其中

分析式(1)所表達(dá)的力/力矩量和電壓量之間的關(guān)系可知,若準(zhǔn)確測(cè)定了各標(biāo)定系數(shù)K,便可得出F-U 之間的具體映射關(guān)系,進(jìn)而獲得不同加載情況下的傳感器六維力分量。
3 數(shù)值建模
3.1 模型組成與連接關(guān)系
建模過(guò)程中對(duì)整個(gè)結(jié)構(gòu)做合理的簡(jiǎn)化,簡(jiǎn)化后整個(gè)傳感器仿真模型由圓臺(tái)、十字梁、側(cè)梁、加載臺(tái)、彈性鉸鏈組成。在Adams/View 仿真環(huán)境中,各部分的連接關(guān)系如下:
1)通過(guò)剛性區(qū)域?qū)A臺(tái)下表面和大地建立固定副連接,同時(shí)將側(cè)梁的兩端表面與大地之間建立固定副連接;
2)假定加載點(diǎn)位于加載臺(tái)上表面中心處,可在加載臺(tái)中心通孔處建立剛性區(qū)域,剛性節(jié)點(diǎn)即為加載點(diǎn);
3)彈性球鉸在受載情況下可視為線彈性變形,需做等效處理。
3.2 彈性球鉸力學(xué)模型
本文六維力傳感器的十字梁和側(cè)梁屬于全柔性機(jī)構(gòu),二者聯(lián)動(dòng)形式的精密微小運(yùn)動(dòng)需要合理的彈性變形單元來(lái)實(shí)現(xiàn),彈性球鉸所具備的體積小、無(wú)機(jī)械摩擦和間隙、無(wú)回退空程等優(yōu)點(diǎn)[6,7]則滿足這一要求。
根據(jù)彈性球鉸線彈性變形假設(shè),擬采用襯套力來(lái)模擬彈性球鉸。在Adams/View 中選擇十字梁和側(cè)梁、側(cè)梁和圓臺(tái)之間對(duì)應(yīng)的標(biāo)記點(diǎn),并賦予相應(yīng)的阻尼系數(shù)和剛度系數(shù),即可完成襯套力的定義。
3.3 Hyperworks 與Adams 聯(lián)合建模
利用與三維造型軟件Pro/e 的數(shù)據(jù)接口,在通用有限元前處理軟件Hyperworks 中導(dǎo)入傳感器相關(guān)部分模型進(jìn)行離散處理,并定義模型連接關(guān)系中所需的剛性區(qū)域和剛性節(jié)點(diǎn),生成模態(tài)中性文件(modal neutral file,MNF)。通過(guò)Adams/Flex 接口在Adams/View 中導(dǎo)入MNF,并添加模擬彈性球鉸的襯套力和各部分連接關(guān)系中的固定副約束,建立聯(lián)合仿真模型。
4 仿真結(jié)果分析
4.1 載荷工況
數(shù)值仿真過(guò)程中,傳感器要承受力和力矩兩種類(lèi)型的載荷。由于傳感器結(jié)構(gòu)關(guān)于坐標(biāo)軸x 和y 具有對(duì)稱(chēng)性,加載時(shí)只需考慮x(或y)和z 方向的載荷。不同載荷工況處理如下:
1)依據(jù)傳感器各向最大的力指標(biāo),加載時(shí),沿x 和z 方向分別添加不同大小的力(x 向?yàn)?.5,1,1.5,2,2.5;z 向?yàn)?,2,3,4,5。單位:103N)。
2)依據(jù)傳感器各向最大力矩指標(biāo),加載時(shí),繞x 和z 方向分別添加不同大小的力矩(x 向?yàn)?,2,3,4,5;z 向?yàn)?,1.5,2,2.5,3。單位:10N·m)。
4.2 結(jié)果分析
針對(duì)不同工況下傳感器各組構(gòu)的力學(xué)性能仿真結(jié)果,分析時(shí)需重點(diǎn)關(guān)注加載臺(tái)的穩(wěn)定性、彈性梁的受載應(yīng)變特性以及彈性鉸鏈的傳力特性。限于篇幅,文中選取圖3~圖7幾種典型工況下的數(shù)據(jù)進(jìn)行說(shuō)明分析。
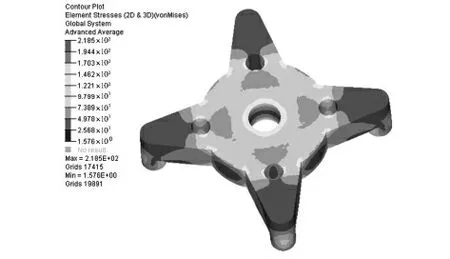
圖3 加載臺(tái)應(yīng)力云圖Fig 3 Stress diagram of loading platform
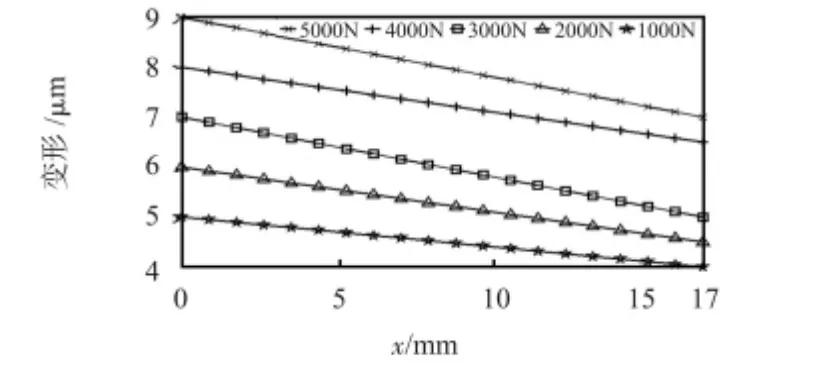
圖4 加載臺(tái)外伸支腳變形曲線Fig 4 Deformation curve of extended leg of loading platform
圖3 描述了Fz=5000N 極限工況下加載臺(tái)的應(yīng)力分布情況,從圖中可以看出:加載臺(tái)的最大應(yīng)力為218 MPa,遠(yuǎn)小于其許用應(yīng)力380 MPa,滿足強(qiáng)度要求。同時(shí),加載臺(tái)應(yīng)力基本呈對(duì)稱(chēng)分布狀態(tài),應(yīng)力變化也較為均勻。
圖4 描述了z 向不同力工況下加載臺(tái)向外延伸的4 個(gè)支腳的變形情況,這里選取處于加載臺(tái)厚度方向中面上且位于+x 坐標(biāo)軸上的一系列節(jié)點(diǎn)來(lái)表征加載臺(tái)的變形情況。從圖4 數(shù)據(jù)可知,在Fz=5000 N 極限力作用下,加載臺(tái)的最大和最小變形分別是9 μm 和7.5 μm,變形量滿足剛度要求。對(duì)于z 向來(lái)說(shuō),在不同力作用下,加載臺(tái)從中心孔邊緣到支腳遠(yuǎn)側(cè)邊緣,其變形量呈近似線性變化,中心邊沿處最大,向外逐步減小,且每種工況下最大與最小變形相差不大,這表明加載臺(tái)受載時(shí)整體變形較為穩(wěn)定,不會(huì)出現(xiàn)局部大變形。
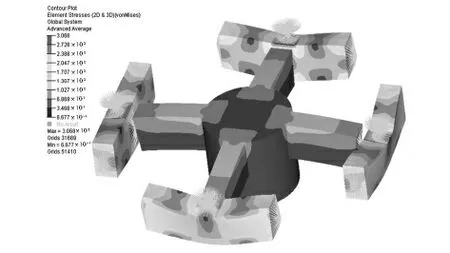
圖5 彈性梁應(yīng)力云圖Fig 5 Stress diagram of elastic beam
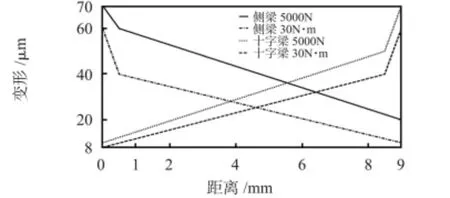
圖6 彈性梁變形曲線Fig 6 Deformation curve of elastic beam
圖5 為彈性梁在Fz=5000 N 極限載荷下的應(yīng)力分布情況,彈性梁的最大應(yīng)力為306 MPa,滿足許用應(yīng)力要求。同時(shí),側(cè)梁和十字梁上的應(yīng)力分布均體現(xiàn)出了良好的對(duì)稱(chēng)特性,且變化較為均勻,總體上側(cè)梁的應(yīng)力狀況要大于十字梁。
圖6 為Fz=5000 N 和Mz=30 N·m 兩種極限工況下側(cè)梁和十字梁的變形情況,由結(jié)構(gòu)對(duì)稱(chēng)性,選取十字梁長(zhǎng)度方向并向外延伸的幾何中心線上節(jié)點(diǎn)數(shù)據(jù)和側(cè)梁中部并沿其長(zhǎng)度方向幾何中心線上的節(jié)點(diǎn)數(shù)據(jù)來(lái)表征各自的變形情況。由圖6 可知,在此兩種極限載荷下,側(cè)梁和十字梁最大變形量均出現(xiàn)在二者交接處,在Fz=5000 N 和Mz=30 N·m 時(shí),二者最大變形量分別為70 μm 和60 μm。對(duì)于側(cè)梁而言,最大變形量均出現(xiàn)在側(cè)梁中間部位,而十字梁的最大變形量均出現(xiàn)在梁的遠(yuǎn)側(cè)端。另外,除側(cè)梁和十字梁交接部有較大變形外,二者其余部位變形近似線性變化,受載—變形特性較好。
圖7 為Fz=5000 N 和Mz=30 N·m 兩種極限工況下各襯套的受力變化,記側(cè)梁與加載臺(tái)相連的襯套受力曲線為襯套a,側(cè)梁和十字梁相連的襯套受力曲線為襯套b。由于各襯套位置對(duì)稱(chēng)分布,對(duì)載荷具有均分性,結(jié)合圖7 可知,襯套a 所受穩(wěn)定力為1 250 N、穩(wěn)定力矩為7.5 N·m,襯套b所受穩(wěn)定力為750 N、穩(wěn)定力矩為3 N·m。同時(shí)各襯套在前0.1 s 都有小幅擾動(dòng),而后迅速趨于穩(wěn)定。這表明各襯套均具有較快響應(yīng)特性,即采用橢圓形彈性球鉸具有良好的靈敏度。
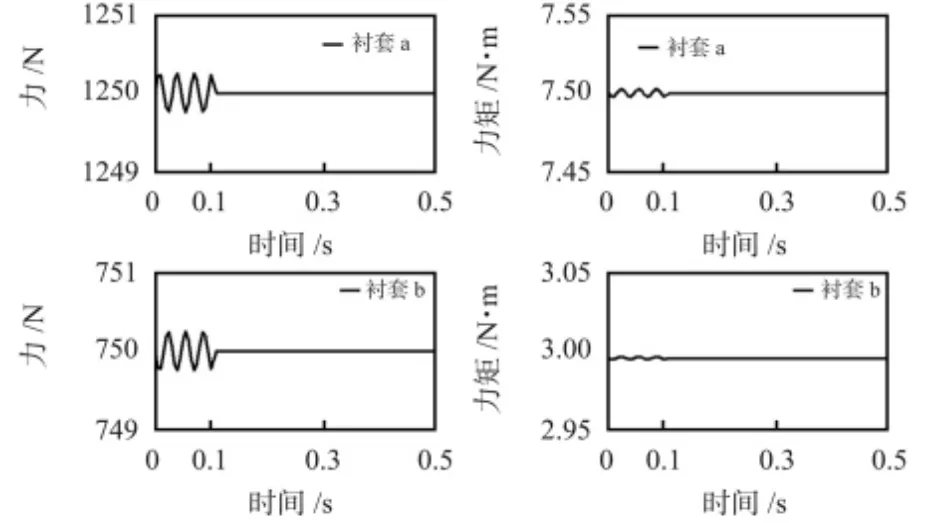
圖7 各襯套力受載變化曲線圖Fig 7 Changing curve of every bushing force
5 結(jié) 論
1)本文提出的新型六維力傳感器結(jié)構(gòu)的測(cè)量原理合理可行,其結(jié)構(gòu)本身具有較好的解耦性能;
2)將力/力矩向周?chē)纸獾募虞d臺(tái)結(jié)構(gòu)傳力過(guò)程穩(wěn)定、均勻,其形式合理可用;
3)依托側(cè)梁和十字梁形式的組合式彈性梁,可以較好分配加載臺(tái)傳遞的載荷,具有良好的受載—變形特性,易于確定較佳的應(yīng)變區(qū)域;
4)幾何轉(zhuǎn)角為橢圓形結(jié)構(gòu)的彈性球鉸響應(yīng)較快,可提高傳感器系統(tǒng)的靈敏度。
[1] Brussel H V,Belien H,Thielemans H.Force sensing for advanced robot control[C]∥Proceedings 5th Int’l Conference on Robot Vision and Sensory Control,Amsterdam,Holland,1985:59-68.
[2] 王國(guó)泰,易秀芳,王理麗.六維力傳感器發(fā)展中的幾個(gè)問(wèn)題[J].機(jī)器人,1997,19(6):474.
[3] 李成剛,尤晶晶,吳洪濤.橢圓形彈性球鉸鏈轉(zhuǎn)動(dòng)性能及疲勞強(qiáng)度研究[J].中國(guó)機(jī)械工程,2011,22(2):232.
[4] 尹瑞多,王宣銀,程 佳,等.廣義六維力傳感器的特點(diǎn)及研究和應(yīng)用狀況[J].液壓與氣動(dòng),2005(10):48-49.
[5] 徐淑華.電工電子技術(shù)[M].3 版.北京:電子工業(yè)出版社,2013:10-15.
[6] 姚建濤,李立建,楊 維,等.直圓柔性球鉸柔度矩陣的解析計(jì)算[J].光學(xué)精密工程,2014,22(7):1858.
[7] Yeh H C,Ni W T,Pan S S.Digital closed-loop nanopositioning using rectilinear flexure stage and laser interferometry[J].Control Engineering Practice,2005,13:559-566.
猜你喜歡
智慧少年·故事叮當(dāng)(2020年10期)2020-11-06 06:19:00
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
河北理科教學(xué)研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學(xué)版(2020年11期)2020-02-01 06:26:58
作文周刊·小學(xué)二年級(jí)版(2018年29期)2018-11-26 11:20:28
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36