基于磁傳感器的彈丸炮口測速系統設計
2015-03-26 07:59:46楊國歡張曉明
傳感器與微系統 2015年2期
楊國歡,張曉明,2
(1.中北大學 電子測試技術重點實驗室,山西 太原030051;2.中北大學 儀器科學與動態測試教育部重點實驗室,山西 太原030051)
0 引 言
炮口初速是測試火炮性能和彈外制導的重要參數之一,常規測量方法有內測法和外測法[1]。外測法將測試儀器或者發射平臺安裝于炮管外部,具有減輕彈體重量,可減少火藥用量的優點,但這些裝置在測量時,不能實時測量,對外部環境依賴較大。如激光式測速法受氣體煙霧作用,會造成其它光學效應,影響測量精度。而內測法能實時測量數據并作為彈外制導的參數[2~4]。然而內測法也存在不足,例如:使用光電測速法的天幕靶只能在白天使用,而光幕靶受炮口火藥氣體、顆粒影響,影響測量精度[5~7]。
針對常規彈藥的飛行環境,本文提出基于線圈靶和磁阻傳感器相結合的方法測量彈丸炮口速度,以提高常規彈藥制導化的自主性和快速反應能力,為后續彈道解算提供初值。該測量系統具有體積小、操作方便、實時性好等優點。
1 測速原理
測量系統組成結構如圖1 所示,兩個相同匝數和相同結構的線圈內嵌于炮管制退器中,保證兩組線圈的中心軸線與炮管軸線中心線共線,兩組線圈相距D。將三軸磁阻傳感器組成測量系統盡量安裝于彈丸質心,保證彈丸在飛行過程中三軸磁阻傳感器不會有晃動。
圖1 測量裝置結構圖Fig 1 Structure of measuring device
在兩組線圈通電后,由電磁感應原理可知線圈產生磁場,磁場方向為平行于制退器中心軸。彈丸發射后經過第一組通電線圈時,磁阻傳感器在感知到線圈產生磁場后產生一個脈沖信號,啟動計時器,通過第二組線圈時,磁阻傳感器再次感知線圈產生感應磁場后,產生第二個脈沖信號,停止計時器,根據這兩個脈沖信號之間的時間間隔可得到彈丸經過兩組線圈的所用的時間Δt;根據公式(1)可以求得彈丸經過兩個線圈時平均速度v

式中 v 為彈丸飛行出炮口的速度;D 為兩組通電線圈的距離;Δt 為定時器測得的通過兩組線圈的時間。由于相對彈丸在高速飛行狀態下,所用的時間短,距離D 也很短,可近似認為這段距離的平均速度為彈丸炮口初度。
2 總體方案設計
如圖2 所示,兩組線圈串聯上電,彈丸飛行通過第一組通電線圈時,磁阻傳感器感知到較大磁場,產生一個較大脈沖,將此信號進行信號調理(放大、濾波)后,經A/D 采集數據,進行上下限閾值比較,若大于閾值,響應中斷請求,定時器開始計時;否則,繼續采集。彈丸飛行通過第二組通電線圈時,同理,磁阻傳感器感知到較大磁場,產生一個較大脈沖信號進行濾波、放大后,經過A/D 轉換模塊轉換為數字量,進行上下限閾值比較,大于閾值時,響應中斷請求,定時器停止計時,通過定時器計時可得彈丸飛行經過兩組線圈的時間,實時解算出彈丸炮口速度。
圖2 總體方案設計圖Fig 2 Overall scheme design
3 硬件設計
如圖3,硬件電路包括傳感器電路、信號調理電路與A/D 轉換采集單元及MCU 運算模塊。

圖3 硬件電路模塊Fig 3 Hardware circuit module
本設計中選用Honeywell 公司研制生產的HMC1043三軸AMR 磁傳感器,該傳感器具有體積小的特點、其封裝只有3 mm×3 mm×1.4 mm,帶寬為5 MHz,可以測量500 kHz以下信號,符合在彈載測量環境中的體積小、動態性能高的測量要求。
磁阻傳感器的放大和濾波電路如圖4 所示,AD8426 是雙通道、軌到軌型輸出的儀表放大器,并且體積較小,僅為4 mm×4 mm×0.85 mm。其中一個通道提供信號調理模塊的抬高電壓,另一通道運用外接電阻器設置放大倍數。
圖4 傳感器信號調理電路Fig 4 Sensor signal conditioning circuit
為了使系統具有體積小、動態性能高的特點,炮口測速系統MCU 選擇使用由ST 公司生產的Cortex—M4 內核的高性能微型控制器STM32F405,該芯片內部自帶集成的三個12 位的A/D 轉換外設,不用外接A/D 轉換器,所以,可以達到減小系統體積的目的,此外,其轉換速率和分辨率等也符合測量要求。
4 軟件設計
軟件流程如圖5 所示,程序主要包括系統初始化模塊、A/D 轉換采集模塊、定時器模塊、中斷模塊和解算模塊。模塊間通過發送命令字和返回字來控制程序的執行過程,程序初始化后開始擦除FLASH,然后進行A/D 轉換采集數據,判斷是否大于閾值,如是打開定時器開始計時,等第二次再次達到閾值定時器停止計時,最后進行初始速度解算和存儲。
圖5 程序流程圖Fig 5 Program flow chart
5 實驗驗證
整個測量系統由產生磁場的兩組通電線圈和彈丸內部磁傳感器的信號采集和調理電路組成。地面實驗采用100 mm空氣炮,空氣炮激光測速儀如圖6 所示。由于實驗條件限制沒有空氣炮炮口制退器,選用110 mm 的PVC 管代替,其口徑大小和制退器一致,PVC 管兩端分別繞上兩組線圈,每組線圈纏繞400 匝,兩組線圈相距100 mm。整個實驗裝置如圖7 所示。

圖6 空氣炮激光測速儀Fig 6 Air cannons laser velocimeter
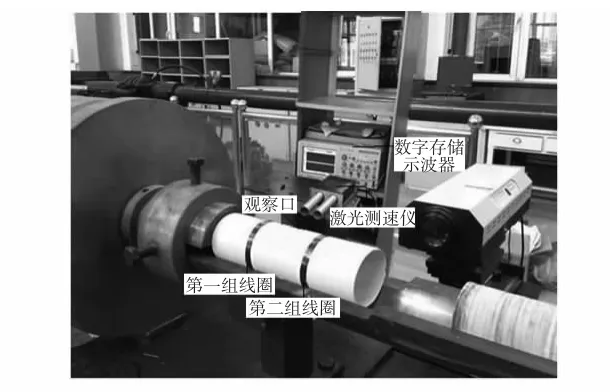
圖7 實驗裝置Fig 7 Experimental apparatus
將線圈通電,炮彈上膛發射,采集三軸傳感器輸出數據和空氣炮測速儀數據。圖8(a)所示的激光測速儀測得的脈沖信號進行解算后得到的炮口速度為81.525 6 m/s。將圖8(b)所示的數據事后進行解算為81.368 7 m/s,同時將本測量系統實時解算出的速度信息通過上位機讀出為81.365 0 m/s,與事后解算值相差0.003 7 m/s,與激光測速儀測得的速度相比,相對誤差相差0.197%。
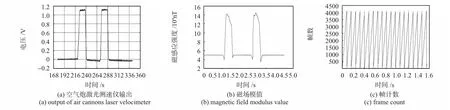
圖8 試驗后測量系統輸出Fig 8 Measurement system output after test
6 結 論
針對常規彈藥的飛行環境,本文提出基于線圈靶和磁阻傳感器相結合的方法測量彈丸炮口速度,通過根據炮口測速系統的測速原理,設計了炮口測速的整體方案,搭建了硬件電路和設計了相應的軟件。實驗表明:基于三軸磁阻傳感器的炮口測速系統的誤差在0.2%以內。該測量系統具有體積小、價格便宜、操作方便、實時性好等優點,對常規彈制導化改造中具有較好的應用前景。
[1] 陳 新,曹從詠,劉英舜.彈丸初速膛口激光實時測量系統研究[J].彈道學報,2002,14(1):84-86.
[2] Gautam R C Kalonia,Amod Mitra.Laser-based projectile speed measurement system[J].Optical Engineering,2007,46(4):044303.
[3] 王 斌.迫擊炮彈在膛內運動姿態、速度測試方法初探[J].兵工標準化,1999(4):18-20.
[4] 楊 昭.彈載測速技術研究[D].太原:中北大學,2007.
[5] 馬 玲,蔡征宇,程風雷,等.毫米波測速雷達的測速原理[J].彈道學報,2003,15(4):87-91.
[6] 馬百雙,劉昌錦.幾種典型炮口初速測試方法比較[J].四川兵工學報,2011,32(11):53-55.
[7] Buckner,Benjamin D,LEsperance,et al.Digital synchroballistic schlieren camera for high-speed photography of bullets and rocket sleds[J].Optical Engineering,2013,52(8):83-105.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
