基于傳感器的細長體橫向低頻振動載荷辨識*
2015-03-26 07:59:10吳巧瑞姚熊亮孫龍泉
傳感器與微系統 2015年1期
吳巧瑞,姚熊亮,孫龍泉
(哈爾濱工程大學 船舶工程學院,黑龍江 哈爾濱150001)
0 引 言
細長體的水下發射有垂直發射和水平發射,相對而言,垂直發射具有貯彈量大、發射率高、可以全方位發射、反應時間短、可以對目標實行飽和攻擊等的顯著優點[1]。細長體的出水過程可分為三個階段:細長體出筒段、水中自由航行段和穿越水面段[2]。雖然這個過程一般只持續幾秒鐘,但細長體卻經歷了一系列復雜的運動環境,具體表現為高動壓、非定常和多相流動。
在細長體出筒過程中,筒內燃氣會隨著細長體尾部從筒內溢出,并與周圍的水摻混,在此過程中,水氣之間傳遞動量和能量,導致水氣混合物的壓力不斷震蕩,同時形成尾空泡[3]和肩空泡[4]。尾部氣泡和肩部空泡隨著細長體出水會發生坍塌,對細長體表面產生很大的沖擊力。水中自由航行階段,細長體將承受風、浪、流復雜海洋環境載荷;在穿越水面階段,自由液面會沿著高速運行的細長體表面上升,到達一定高度后脫落并對沖擊細長體表面。由此可見細長體在出水過程中將遭受十分復雜的載荷作用。
細長體在非定常非均勻載荷作用將發生橫向振動,其中,低頻振動具有振動能量大、結構響應位移大和變形大的特性[5],因此,它可能會造成極大的危害。另外,由于細長體承載能力較差。因此,對細長體橫向低頻振動載荷的辨識具有很大的必要性。
本文在模態疊加法的基礎上,開發了一種辨識細長體在出水過程中橫向低頻振動載荷的方法,即根據細長體發射試驗中傳感器測得的加速度等信息,辨識細長體出水過程中的低階振動受力狀態,即彎矩和剪力信息,并判斷最大載荷出現的細長體截面,為細長體結構的強度校核和結構設計提供依據。
1 低頻振動載荷辨識方法
1.1 載荷辨識理論推導
細長體結構的運動方程可離散成多自由度系統的運動方程式

式中 Ms為結構的質量矩陣;Cs為結構的內阻尼矩陣;Ks為結構的剛度矩陣;L 為流體力(包括外力和結構運動引起的水動力)節點矢量;ω 為結構的節點位移矢量,是時間和空間的函數,可寫成ω(x,t)。
結構在真空中的無阻尼自由振動方程式為

解之,可得其固有頻率λ01,λ02,…和干模態φ1,φ2,…用最初n 個干模態組成的模態矢量陣進行坐標轉換,則位移和廣義位移可寫成式(3)的形式

式中 φ=[φ1,φ1,…,φn],q 為廣義坐標矢量,即結構在真空中的主坐標矢量。
另外,有

式中 M 為細長體各截面彎矩,正是本軟件要辨識的物理量,如果想得到細長體各截面的彎矩信息,必須知道細長體各階主坐標。由式(3)可得

式中 細長體各點加速度¨ω 是已經測得的加速度信息。下面將介紹如何根據各點加速度¨ω 進行辨識得到細長體各階主坐標qi(t),進而得到細長體各截面彎矩M(x,t)和剪力N(x,t)。
細長體作為無限自由度的彈性振動系統,總體彈性振動和局部彈性振動疊加在一起。采用濾波技術將加速度的低頻部分和高頻部分分開,總體彈性振動和局部彈性振動分開。得到細長體的前幾階振動疊加的加速度¨ω 信息之后,再利用式(5)提取出各階主坐標。
經濾波后,式(5)可改寫成

利用式(6)提取主坐標各階主坐標qi(t)的傳統做法是直接將式(6)二次積分,但隨著積分時間步的延長,這種做法會使累計誤差越來越大,使積分出的位移ω1和主坐標產生qi(t)漫漂現象,即偏離實際值越來越遠。因此,本文采用拉普拉斯變換的方式求解式(6),可有效地改善該現象。
對式(6)兩邊同時乘φi(x)并沿細長體長度方向上積分,可得

由于振型φ 具有正交性,易知
對式(8)兩邊同時做拉普拉斯變換

式中 Qi為qi(t)的拉普拉斯變換,易知

式中 q(0)和q'(0)可通過初始條件ω(0),ω'(0)以及式(3)得到。
通過式(10),求得Qi(p)后,對其進行反演即可得,而后通過式(4)即可得各截面彎矩
同理,可得各截面的剪力為

1.2 載荷辨識流程
由于本文目的是辨識細長體出水過程中低頻振動載荷,因此,在細長體出水實驗中,由位移傳感器測得細長體截面初始位移信息,速度傳感器測得初始速度信息和加速度傳感器獲得加速度信息。首先,要對測得的加速度信息進行濾波處理,濾去高頻部分,保留低頻部分。然后,即可使用1.1 節中的辨識方法得到任意截面的彎矩和剪力信息。另外,由于式(11)和式(12)中涉及高階導數求導問題,為了減小誤差,可以對φ 進行曲線擬合后求導。具體辨識流程如圖1 所示。

圖1 載荷辨識流程圖Fig 1 Flow chart of load identification
2 方法驗證
由于細長體出水數據的保密性,特選取一個具有解析解的模型算例[6]:如圖2 所示的一等截面簡支梁,其單位長度的質量為m,在1/4 跨長處作用一干擾力P0sin θt,并且θ=0.75ω1,已知阻尼比為ζ1=ζ2=0.05,用振型分解法求其位移和彎矩。
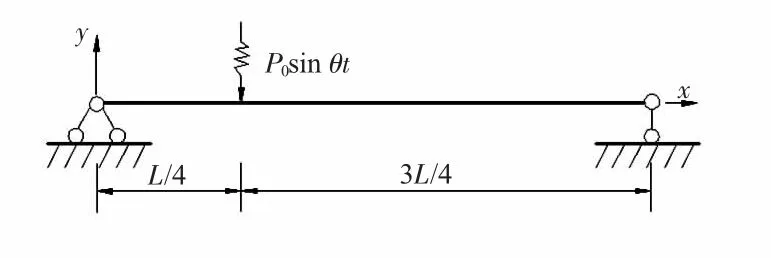
圖2 模型圖Fig 2 Modal illustration
由振型分解法,得彎矩和剪力的解析解分別為
取彈性模量E=2.1×1011Pa,單位長度質量m=245 kg/m,慣性矩I=1.57×10-4m4,載荷幅值P0=1000 N,簡支梁長度L=2 m,計算步長 為0.000 05 s,計算時間為0.01 ~0.02 s。將相關的若干截面的初始速度信息、初始位移信息、加速度時歷值以及振型信息輸入程序,即可獲得任意截面的彎矩和剪力信息。
然后給出了x=1.0 m 和x=1.5 m 處使用本文提出的辨識方法所得的彎矩和剪力時歷曲線,并與解析解進行了對比,如圖3 和圖4 所示。在圖3 的彎矩比較圖中,解析解與數值解幾乎吻合,從局部放大圖中才能看出微小的誤差。在圖4 中,解析解和計算值也吻合較好,但顯然,其誤差要大于彎矩的計算誤差,這可能是剪力需要更高階的求導導致的。
3 結 論
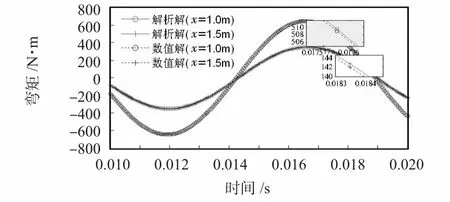
圖3 彎矩比較圖Fig 3 Comparison of moment

圖4 剪力比較圖Fig 4 Comparison of shear force
本文基于模態疊加法,提出了一種細長體出水橫向低頻振動載荷辨識的方法。在輸入傳感器測得相關的試驗數據的基礎上,對加速度進行濾波處理,濾去高頻部分保留低頻成分,可有效地辨識細長體出水過程中發生橫向低頻振動時,任意截面在任何時刻的彎矩和剪力信息,旨在判斷最大載荷截面以進行強度校核,為實際工程的結構設計提供一定的依據。
[1] 裴 繯,張宇文,袁緒龍,等.潛載細長體垂直發射橫向振動特性仿真分析[J].兵工學報,2009,30(8):1056-1060.
[2] 申麗輝.航行體水下及出水過程的流體特性研究[D].哈爾濱:哈爾濱工程大學,2013:1-8.
[3] 劉志勇,顏 開,王寶獸.潛射細長體尾空泡從生成到拉斷過程的數值模擬[J].船舶力學,2005,9(1):43-50.
[4] 劉海軍,王 聰,鄒振祝,等.潛射細長體出筒過程肩空泡形態和水阻動力特性研究[J].工程力學,2012,29(7):313-319.
[5] 夏益霖,吳家駒.航天發射的低頻振動環境及其模擬[J].強度與環境,1998(1):1-8.
[6] 張相庭,王志培,黃本才,等.結構振動力學[M].上海:同濟大學出版社,2005:112-117.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44