后向散射式小型激光雷達(dá)能見度儀探測研究
2015-03-18 03:07:52莊子波蔣立輝
激光技術(shù) 2015年1期
莊子波,黃 煒,符 超,蔣立輝
(1.中國民航大學(xué)民航氣象研究所,天津300300;2.中國民航大學(xué)飛行技術(shù)學(xué)院,天津300300;3.中國民航大學(xué)天津市智能信號與圖像處理重點實驗室,天津300300)
引 言
隨著我國經(jīng)濟(jì)的快速增長,各地機(jī)場建設(shè)如雨后春筍般迅猛發(fā)展,在航空領(lǐng)域,能見度對于空中交通安全有著重大的影響,越發(fā)受到人們的重視。2010-08-24,一架客機(jī)在黑龍江伊春機(jī)場降落時失事,客機(jī)上96人中42人遇難、54人受傷,事后調(diào)查原因系能見度太低,飛行員無反應(yīng)時間導(dǎo)致慘劇的發(fā)生。在不良能見度天氣條件下,采取相應(yīng)的管制措施能夠有效地減少惡性事故的發(fā)生,保證空中交通的安全。
能見度設(shè)備方面,美國、德國和芬蘭在這一領(lǐng)域一直處于領(lǐng)先地位,國內(nèi)僅有少數(shù)科研機(jī)構(gòu)完成了樣機(jī)的研制,且目前的能見度儀多采用透射式和前向散射式,其體積較大、安裝過程復(fù)雜,只能獲取水平方向能見度。在出現(xiàn)不均勻的霧、局部的雨或雪暴的情況下,儀器的讀數(shù)極易出現(xiàn)誤差。同時由于其測量采樣空間小,測量結(jié)果只能反映小區(qū)域能見度信息,對霧團(tuán)等嚴(yán)重影響交通安全的天氣現(xiàn)象無法做出準(zhǔn)確、及時的反映。可以看出,進(jìn)行能見度測量設(shè)備的研制具有重大的現(xiàn)實意義,且能夠大力推進(jìn)民航設(shè)備的國產(chǎn)化進(jìn)程,實現(xiàn)我國從民航大國到民航強(qiáng)國的轉(zhuǎn)變。
本文中基于嵌入式計算機(jī)設(shè)計了一臺激光雷達(dá)能見度儀探測大氣,首先選用PCM-3370E作為系統(tǒng)集成解決方案,實現(xiàn)了系統(tǒng)輕小化設(shè)計和數(shù)據(jù)處理。其次利用激光探測的優(yōu)點,可有效獲得整個探測路徑的能見度信息,填補(bǔ)了傳統(tǒng)能見度儀點監(jiān)視的盲區(qū)。本系統(tǒng)不僅能測量水平能見度,還能測量斜程能見度,同時通過后期改變探測方向和算法,還可獲得云層高度信息。且激光雷達(dá)具有高時空分辨率和大測量范圍等特點,能夠準(zhǔn)確預(yù)報霧團(tuán)等嚴(yán)重威脅交通安全的環(huán)境特征,可廣泛應(yīng)用于機(jī)場氣象監(jiān)測、空中交通安全預(yù)警及大氣科學(xué)研究領(lǐng)域。
1 系統(tǒng)測量原理
激光雷達(dá)探測的基本原理為:首先探測激光由激光器發(fā)出,在探測路徑上與大氣分子和氣溶膠粒子等介質(zhì)相互作用,被大氣中的粒子散射,后向散射的激光在返回的路程中再次被大氣消光衰減,然后回波信號由接收機(jī)接收,最后通過數(shù)據(jù)處理計算相應(yīng)的消光系數(shù)并得到此時的能見度。根據(jù)Koschmieder定律,能見度方程為:

式中,V為能見度,σ為白光大氣消光系數(shù),ε為視覺感應(yīng)閾值,即人眼能夠?qū)⒛繕?biāo)從背景中分辨出來的最小亮度對比,航空領(lǐng)域國際民航組織(International Civil Aviation Organization,ICAO)推薦取 ε=0.05。
由于本設(shè)備采用532nm波長探測激光,考慮到白光與探測激光傳輸上的差別,對(1)式進(jìn)行修正,得到小于6km能見度時的能見度方程[1]為:

式中,σλ為使用532nm激光探測大氣時的消光系數(shù)。
2 系統(tǒng)概述及控制實現(xiàn)
2.1 系統(tǒng)概述
系統(tǒng)采用收發(fā)分置離軸結(jié)構(gòu),如圖1所示,主要由三部分組成:激光發(fā)射單元、接收光學(xué)單元、信號采集和控制單元。系統(tǒng)采用模塊化和輕小全固化結(jié)構(gòu),體積小巧、結(jié)構(gòu)緊湊、輕便穩(wěn)定,系統(tǒng)整體封裝于210mm×170mm×140mm的鋁結(jié)構(gòu)框架中。
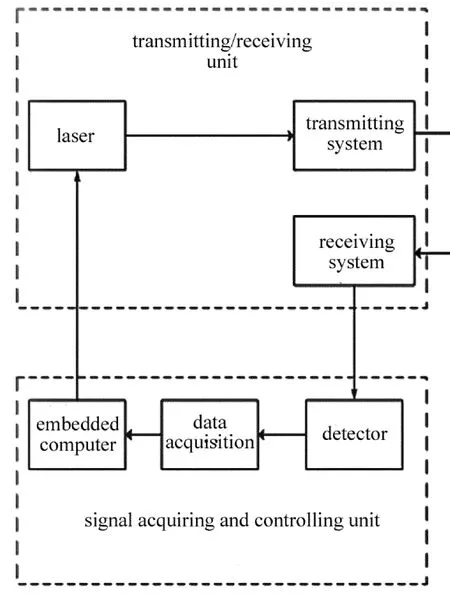
Fig.1 Structure of the system
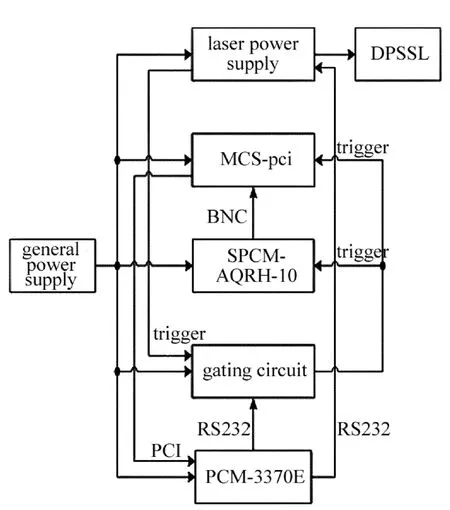
Fig.2 Circuit of the system
系統(tǒng)電路結(jié)構(gòu)如圖2所示,在光學(xué)設(shè)計方面,激光器采用二極管抽運固體激光器(diode pumped solid-state laser,DPSSL),該激光器具有低脈沖能量和高脈沖重復(fù)頻率的特點,既滿足了人眼安全的標(biāo)準(zhǔn),又能保證單位時間脈沖積累的數(shù)目,提供了足夠的平均發(fā)射功率[2]。光束耦合器將激光器發(fā)射的激光束轉(zhuǎn)換為光纖中的光波,用來聚焦和準(zhǔn)直激光的發(fā)射光束,降低激光發(fā)射過程中的能量損耗。本設(shè)計中采用了一對口徑均為50mm的發(fā)射/接收望遠(yuǎn)鏡,望遠(yuǎn)鏡由錐形鏡筒及后續(xù)的平面鏡、組合透鏡組成,最后通過光纖和光束耦合器與雪崩光電二極管(avalanche photo diode,APD)探測器相連,用于發(fā)射和接收激光信號。同時,通過約束發(fā)射/接收視場角,以提高探測激光的能量利用率,并且保證發(fā)射視場角略小于接收視場角。系統(tǒng)工作狀態(tài)下發(fā)射望遠(yuǎn)鏡將激光匯聚成平行光束,發(fā)射至探測空間。接收望遠(yuǎn)鏡由一組組合透鏡構(gòu)成,接收與大氣相互作用后散射回的激光雷達(dá)回波信號。窄帶濾光片位于透鏡組的最前端,以濾除工作波長帶外的背景光和雜散光。回波信號最終被匯聚到接收光纖,輸送到光電探測器。
在電學(xué)設(shè)計方面,采用了模塊化的設(shè)計思想。針對激光雷達(dá)回波信號相對微弱[3]的特點,此處選用低噪聲、高量子效率,可實現(xiàn)單光子探測的雪崩光電二極管探測器SPCM-AQRH-10實現(xiàn)光信號至電信號的轉(zhuǎn)換,然后由同軸電纜接口(bayonet nut connector,BNC)將電信號發(fā)送至光子計數(shù)卡。光子計數(shù)卡完成數(shù)據(jù)的采集,此處選用具有多通道和高采集速率的MCS-pci,保證了對光電探測器輸出的有效采集[4]。系統(tǒng)主要技術(shù)參量如表1所示。
經(jīng)過隨訪以及引產(chǎn)結(jié)果,證實了90名孕婦中,存在34例出現(xiàn)中樞神經(jīng)系統(tǒng)畸形胎兒,其中有4例無腦兒,5例腦膨出,2例露腦畸形,4例全前腦,1例頸部水囊瘤,10例腦積水,8例腦室擴(kuò)張;對照組孕婦中,其中有27例檢查結(jié)果一致,檢查的確診率為79.41%;觀察組孕婦中,其中有33例檢查結(jié)果一致,檢查確診率為97.06%;對比兩組孕婦的確診率,觀察組孕婦的檢查正確率高于對照組孕婦,數(shù)據(jù)差異具有可比性(P<0.05)。
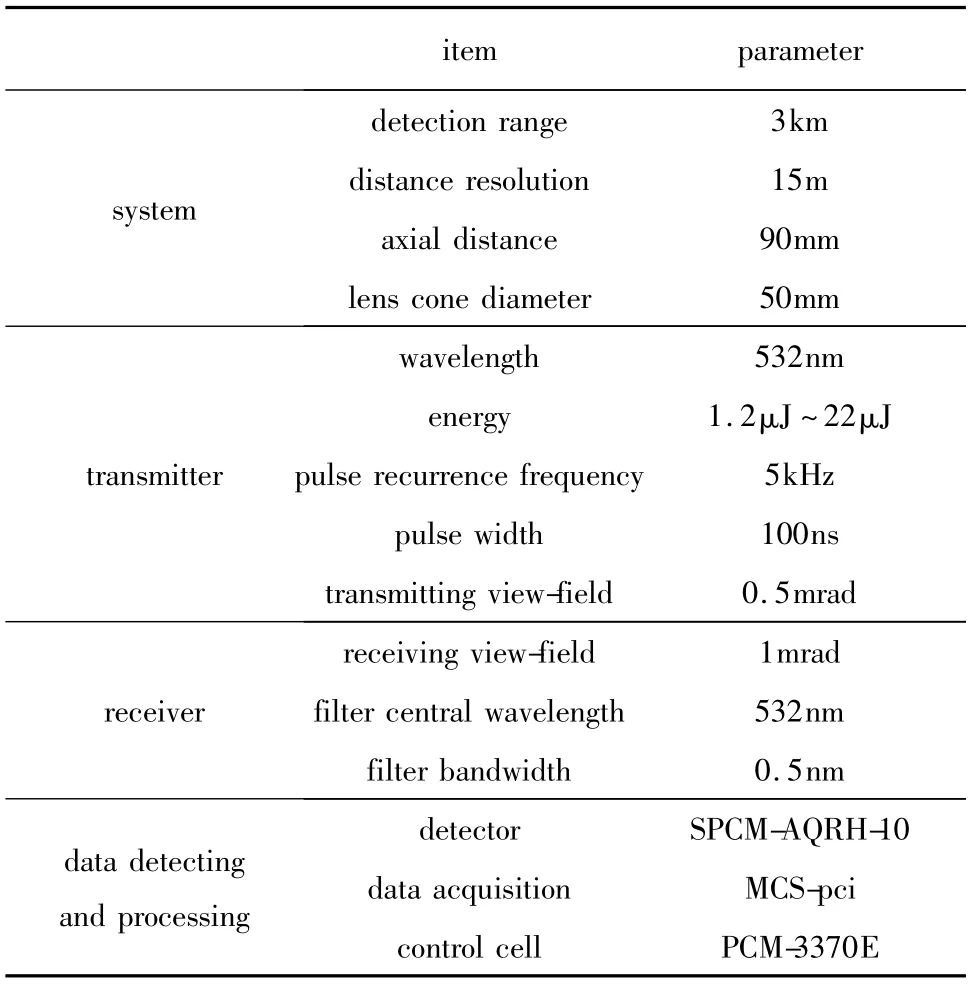
Table 1 Parameters of the lidar visibility system
值得一提的是,本系統(tǒng)的數(shù)據(jù)存儲、處理和控制由嵌入式計算機(jī)完成[5-6]。考慮到整個激光雷達(dá)能見度測量系統(tǒng)的便攜性和數(shù)據(jù)處理性能要求,選用基于PC/104總線的研華PCM-3370E作為系統(tǒng)集成解決方案。在尺寸上,該板卡規(guī)格為96mm×115mm,滿足系統(tǒng)結(jié)構(gòu)輕小化要求。在性能上,該嵌入式計算機(jī)采用Intel Celeron 400MHz處理器,512M內(nèi)存,板卡支持RS-232和RS-485接口、通用串行總線(universal serial bus,USB)控制芯片及接口和10M/100M以太網(wǎng)接口,配有4G的小型快閃(compact flash,CF)卡,數(shù)據(jù)處理能力完全滿足系統(tǒng)的實際應(yīng)用要求。光子計數(shù)卡可以通過轉(zhuǎn)接模塊與該板卡的120針基于外設(shè)互聯(lián)設(shè)備(peripheral computer interconnect,PCI)總線的堆棧式插座相連接。除此之外,該板卡集成的有線網(wǎng)口還可以實現(xiàn)儀器的遠(yuǎn)程控制,實現(xiàn)多種測量設(shè)備的組網(wǎng)和統(tǒng)一控制。圖3為PCM-3370E的內(nèi)部結(jié)構(gòu)框圖。
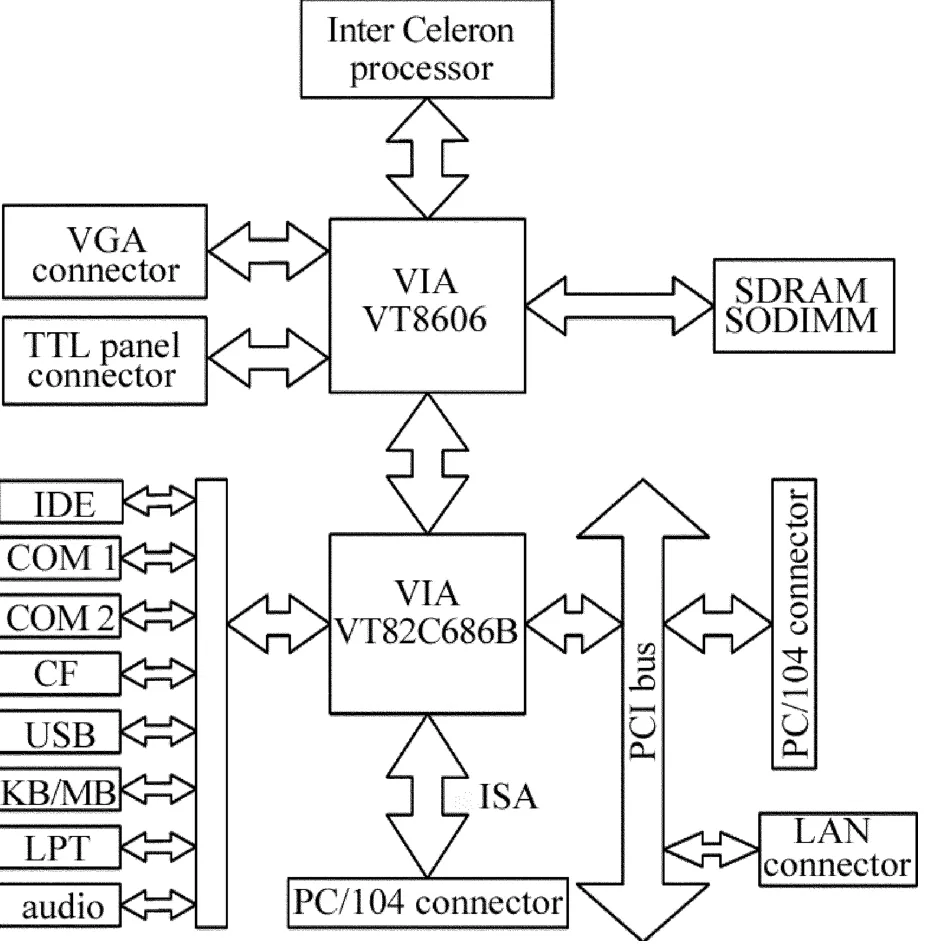
Fig.3 Internal structure of PCM-3370E
在數(shù)據(jù)處理方面,本系統(tǒng)采用了一種基于Fernald后向積分法的大氣消光系數(shù)迭代算法來測量斜程及水平方向的大氣平均能見度值[7]。該算法克服了以往算法中由于消光系數(shù)初值的不確定,從而導(dǎo)致結(jié)果不穩(wěn)定的現(xiàn)象,通過控制迭代精度,經(jīng)過有限次迭代可以得到穩(wěn)定的輸出結(jié)果,為激光雷達(dá)能見度系統(tǒng)測量結(jié)果的可靠性提供了算法的保障。
2.2 系統(tǒng)控制實現(xiàn)
整個激光雷達(dá)能見度測量系統(tǒng)的工作時序由嵌入式計算機(jī)控制,控制對象包括激光器、光子計數(shù)卡、光電探測器和門控電路。其中激光器通過激光器電源間接控制,光子計數(shù)卡和光電探測器通過門控電路進(jìn)行直接控制。
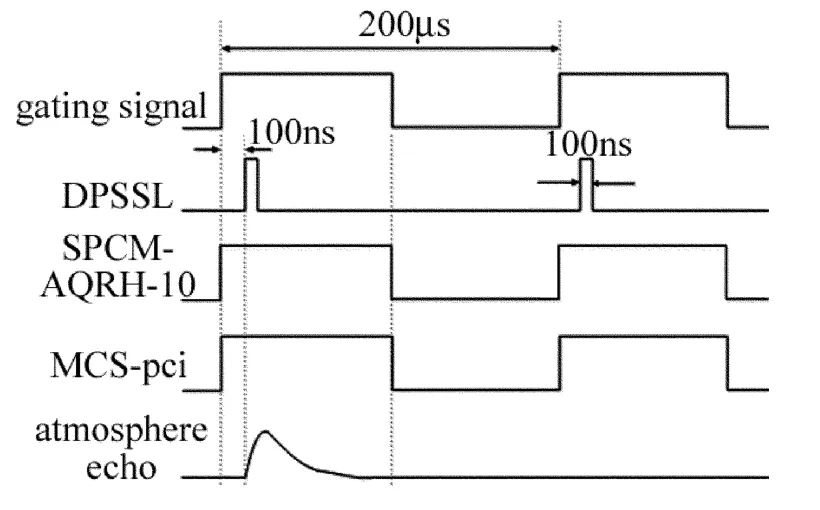
Fig.4 Working sequence of the system
如圖4所示,系統(tǒng)開始工作時,PCM-3370E從串行通信接口(RS232)發(fā)送觸發(fā)信號至激光器電源,激光器開始工作。同時激光器電源觸發(fā)門控電路發(fā)送延時觸發(fā)信號至MCS-pci和SPCM-AQRH-10。此處MCS-pci設(shè)置的單通道采集時間為100ns,由于激光器的啟動存在響應(yīng)時間,激光束的發(fā)射大約滯后觸發(fā)信號100ns,而MCS-pci和SPCM-AQRH-10的響應(yīng)時間很短,可以認(rèn)為接收到觸發(fā)信號后立即工作,為實現(xiàn)系統(tǒng)的收發(fā)同步,故去掉接收到的第1個采樣值,從第2個采樣值開始數(shù)據(jù)的采集。
系統(tǒng)處于工作狀態(tài)時,首先由SPCM-AQRH-10完成信號的探測,將窄帶濾光片濾光處理后的激光雷達(dá)回波信號進(jìn)行光電轉(zhuǎn)換,然后由MCS-pci完成信號的采集,并將采集的結(jié)果傳至嵌入式計算機(jī),最后由PCM-3370E完成數(shù)據(jù)的處理。
3 外場測試結(jié)果及分析
為了測試系統(tǒng)的性能,首先系統(tǒng)進(jìn)行了特征天氣的水平能見度測量實驗[8],然后與美國Belford前向散射式能見度儀進(jìn)行了水平能見度的對比實驗,最后采用飛機(jī)實測法進(jìn)行了斜程能見度的對比實驗。
圖6所示為激光雷達(dá)能見度儀在2013-08-13連續(xù)24h的水平能見度測量結(jié)果[9],并將測試結(jié)果與美國Belford前向散射式能見度儀進(jìn)行對比實驗。圖中曲線design表示激光雷達(dá)能見度系統(tǒng)的測量結(jié)果,橫坐標(biāo)表示探測的具體時刻,縱坐標(biāo)表示該時刻的能見度。
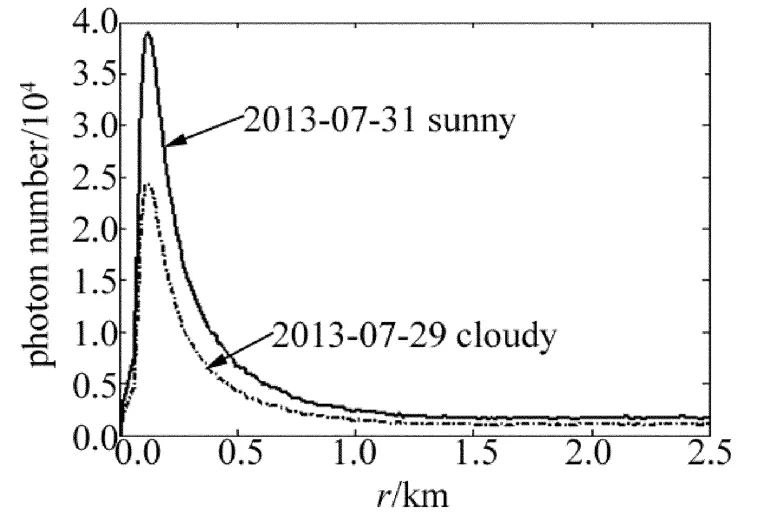
Fig.5 Horizontal return signals under different weather conditions
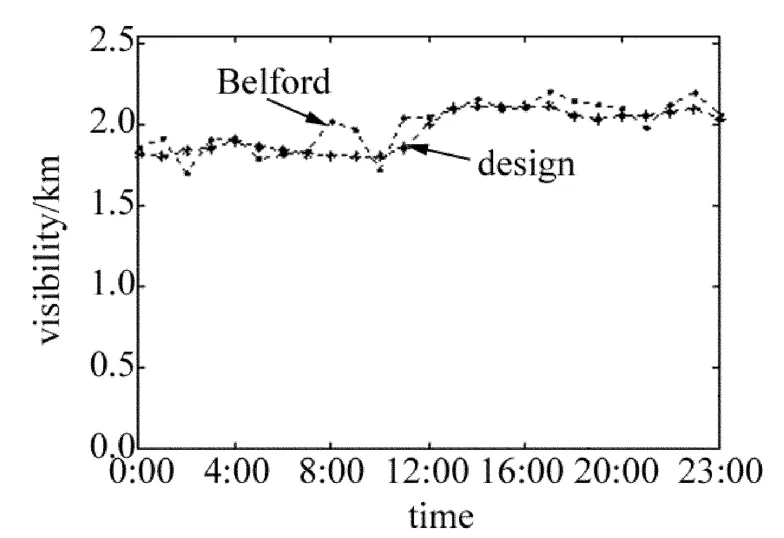
Fig.6 Daylong visibility measurement of the system
從圖6中可以看出,當(dāng)日上午10點左右能見度為1.7km,能見度情況不佳,有輕霧;10點之后霧氣消散,能見度情況略微好轉(zhuǎn),能見度在2.2km左右波動。將本次外場測量結(jié)果與美國Belford前向散射式能見度儀進(jìn)行對比實驗,得到兩者測量誤差在10%以內(nèi)。經(jīng)過后續(xù)大量的對比實驗,如表2所示,統(tǒng)計得到本系統(tǒng)測量總體誤差在15%以內(nèi),完全符合ICAO對于機(jī)場氣象測量設(shè)備的要求[10]。
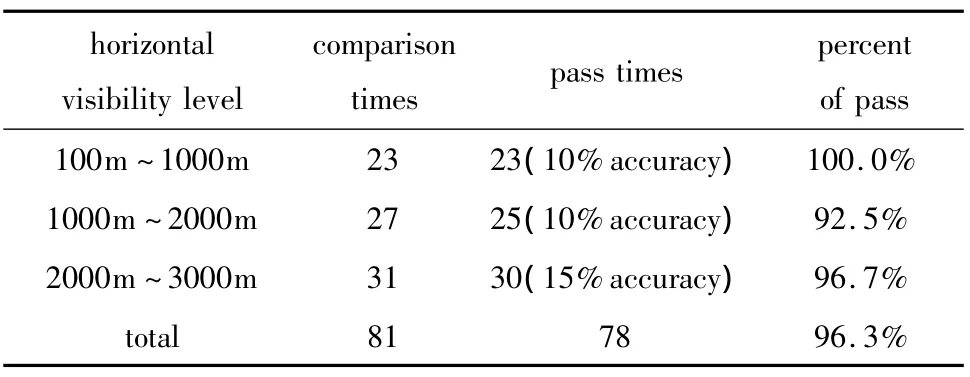
Table 2 Horizontal visibility measurement of comparative field tests
雖然兩種測量儀器的測量原理不同,但是在測量結(jié)果上保持了較高的一致性,這表明本激光雷達(dá)能見度儀具有較高的準(zhǔn)確性,并且具有良好的全天候工作能力。
另外經(jīng)過大量的實驗發(fā)現(xiàn),本系統(tǒng)在低能見度條件下測量結(jié)果要優(yōu)于高能見度情況,這是因為陰天、雨霧等低能見度天氣,大氣氣溶膠密度較大,使得激光后向散射能量明顯增強(qiáng),信噪比明顯提高。由于本系統(tǒng)特別是針對低能見度情況設(shè)計的,低能見度天氣條件下的測量結(jié)果更具有實際意義,適用于機(jī)場跑道能見度測量的實際情況。
表3中給出了系統(tǒng)與飛機(jī)實測斜程能見度的對比實驗結(jié)果。對比實驗結(jié)果表明,本系統(tǒng)在進(jìn)行斜程能見度測量時具有較高的探測精度,尤其在能見度小于1000m時,測量誤差在10%以內(nèi),也滿足了ICAO對于機(jī)場氣象測量設(shè)備的要求。
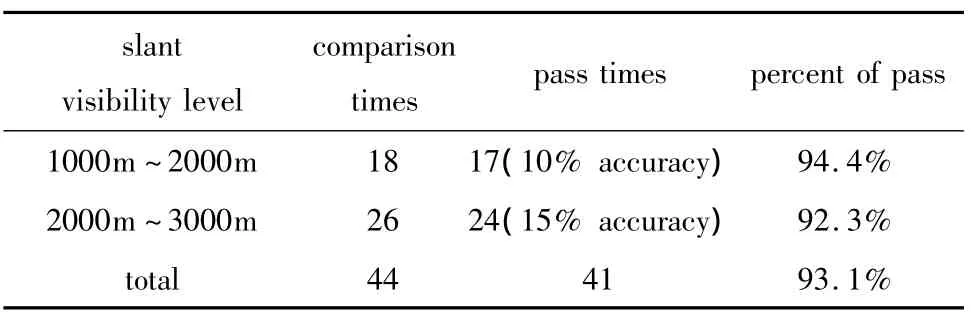
Table 3 Slant visibility measurement of comparative field tests
4 結(jié)束語
基于后向散射原理,以嵌入式計算機(jī)為系統(tǒng)控制和數(shù)據(jù)處理核心,設(shè)計了一臺小型激光雷達(dá)能見度儀,該系統(tǒng)采用模塊化和輕小全固化結(jié)構(gòu),具有緊湊小巧、穩(wěn)定輕便等優(yōu)點。該系統(tǒng)不僅能夠測量水平能見度,還可測量斜程能見度,充分滿足了機(jī)場的應(yīng)用需求。經(jīng)過外場測量實驗和對比實驗,該系統(tǒng)擁有良好的全天候工作能力,且測量誤差小于15%,具有較高的測量精度,滿足ICAO對于機(jī)場氣象設(shè)備的要求,對于推動國內(nèi)機(jī)場氣象設(shè)備國產(chǎn)化進(jìn)程有舉足輕重的意義,具有很高的應(yīng)用前景。
[1] XIONG X L,JIANG L H,F(xiàn)ENG Sh.Return signals processing method of Mie scattering lidar[J].Infrared and Laser Engineering,2012,44(1):89-95(in Chinese).
[2] YANG Y K,MARSHAK A,PALM S P,et al.Cloud impact on surface altimetry from a spaceborne 532nm micropulse photoncounting lidar:system modeling for cloudy and clear atmospheres[J].IEEE Transaction on Geoscience and Remote Sensing,2011,49(12):4910-4919.
[3] SHAO Y J,ZHU L Q,GUO Y K,et al.Single photon counting system and its noise analysis[J].Modern Electronics Technique,2013,36(6):167-170.
[4] JIA H,LOU J M,DING Zh Q,et al.Study on the detecting system if single photon counting spectrometer[J].Acta Photonica Sinica,2013,42(1):1-5(in Chinese).
[5] MEI Y H.Design of embedded computer platform in integrity module avionics[J].Computer and Modernization,2013,12(1):188-191(in Chinese).
[6] MEI Y H.Engineering design of embedded computer based on MPC8265[J].Telecommunication Engineering,2012,52(3):375-378(in Chinese).
[7] TIAN F,LUO J,HU D P,et al.Inversion algorithm for slant visibility based on lidar technique[J].Laser & Infrared,2012,42(11):1239-1243(in Chinese).
[8] LI H,SUN X J,SHAN Ch H,et al.Basis theory and observation of meteorological visibility[J].Journal of PLA University of Science and Technology(Natural Science Edition),2013,14(3):297-302(in Chinese).
[9] WANG Y,GENG F H,CHEN Y H,et al.Study of haze with different intensity categories at Pudong District in Shanghai based on micro-pulse lidar[J].China Environmental Science,2013,33(1):21-29(in Chinese).
[10] NAVIGATION SERVICES LIGHTING SYSTEMS OFFICE RVR PRODUCT TEAM.Performance specification PC based runway visual range(RVR)system[S/OL].(2006-08-22)[2014-01-19].http://www.faa.gov/about/office_org/headquarters/ato/service_units/techops/navservices/lsg/rvr/media/FAA-E-2772B.pdf.
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農(nóng)業(yè)(2016年18期)2016-08-16 03:28:27
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
