多舵面飛機(jī)電力作動(dòng)系統(tǒng)協(xié)調(diào)控制策略研究
2015-03-15 12:04:54李成茂石山劉德鵬
飛行力學(xué) 2015年5期
李成茂, 石山, 劉德鵬
(空軍工程大學(xué) 航空航天工程學(xué)院, 陜西 西安 710038)
多舵面飛機(jī)電力作動(dòng)系統(tǒng)協(xié)調(diào)控制策略研究
李成茂, 石山, 劉德鵬
(空軍工程大學(xué) 航空航天工程學(xué)院, 陜西 西安 710038)
隨著大型飛機(jī)舵面結(jié)構(gòu)布局的變化,傳統(tǒng)的集中式結(jié)構(gòu)飛控系統(tǒng)難以滿足舵面協(xié)調(diào)過程中準(zhǔn)確性的要求。為此引入多智能體的概念,將單個(gè)舵面等效為一個(gè)智能體,構(gòu)建分布式電力作動(dòng)系統(tǒng)的多智能體系統(tǒng)結(jié)構(gòu)。采用聯(lián)盟式體系結(jié)構(gòu),分別對(duì)聯(lián)盟內(nèi)部分體式舵面智能體的同步聯(lián)動(dòng)控制、不同聯(lián)盟間舵面協(xié)調(diào)偏轉(zhuǎn)控制進(jìn)行控制策略的設(shè)計(jì),并建立仿真模型。仿真結(jié)果表明,舵面能夠準(zhǔn)確地收斂到給定的舵面協(xié)調(diào)偏轉(zhuǎn)狀態(tài),并且該策略能有效抑制舵面負(fù)載干擾引起的協(xié)調(diào)偏轉(zhuǎn)率波動(dòng),解決了傳統(tǒng)集中式飛控系統(tǒng)多舵面協(xié)調(diào)控制準(zhǔn)確性不好的問題。
多舵面; 多智能體; 電力作動(dòng)系統(tǒng); 協(xié)調(diào)控制
0 引言
隨著主動(dòng)控制技術(shù)的發(fā)展,現(xiàn)代大型飛機(jī)大多具有多操縱面布局結(jié)構(gòu)[1]。空客公司的A320 有5對(duì)擾流片、2對(duì)副翼和2對(duì)升降舵;A340有6對(duì)擾流片和4對(duì)副翼;A380則更進(jìn)一步增加到8對(duì)擾流片。波音公司的飛機(jī)大部分也具有多操縱面布局結(jié)構(gòu),如B777的多塊擾流片和襟翼[2]。多操縱面布局結(jié)構(gòu)已經(jīng)成為大型飛機(jī)的發(fā)展趨勢(shì)。傳統(tǒng)的集中式結(jié)構(gòu)電傳飛控系統(tǒng)難以滿足舵面協(xié)調(diào)與管理過程中實(shí)時(shí)性、準(zhǔn)確性的要求[3],為此,國(guó)內(nèi)外一些技術(shù)驗(yàn)證機(jī)及新一代飛機(jī)逐步采用分布式電傳飛控系統(tǒng)的結(jié)構(gòu)設(shè)計(jì)。多智能體系統(tǒng)具有較好的靈活性和適應(yīng)性,能夠通過智能體局部的智能行為以及對(duì)多信息融合實(shí)現(xiàn)整體資源的優(yōu)化,并能動(dòng)態(tài)地適應(yīng)任務(wù)需求來保持操作的響應(yīng)。本文主要將多智能體技術(shù)應(yīng)用到飛機(jī)電力作動(dòng)系統(tǒng)控制結(jié)構(gòu)與控制方法的改進(jìn)中,構(gòu)建分布式電力作動(dòng)系統(tǒng)的多智能體系統(tǒng)結(jié)構(gòu),以探索是否能滿足多操縱面布局協(xié)調(diào)性的要求。
1 智能體的結(jié)構(gòu)設(shè)計(jì)
國(guó)外許多先進(jìn)飛機(jī)逐步采用了多操縱面設(shè)計(jì)(如空客A380[4]),即將一個(gè)傳統(tǒng)的單體式舵面分成幾個(gè)小的分體式舵面,每個(gè)小的分體式舵面可由獨(dú)立的電力作動(dòng)器驅(qū)動(dòng),從而降低了對(duì)單臺(tái)電力作動(dòng)器的可靠性、體積、散熱等的要求。
1.1 單個(gè)智能體結(jié)構(gòu)設(shè)計(jì)
每個(gè)舵面均由控制器、驅(qū)動(dòng)電機(jī)、傳動(dòng)裝置等電力作動(dòng)器組成,將單個(gè)舵面等效為一個(gè)智能體,各組成部分間的關(guān)系如圖1所示。
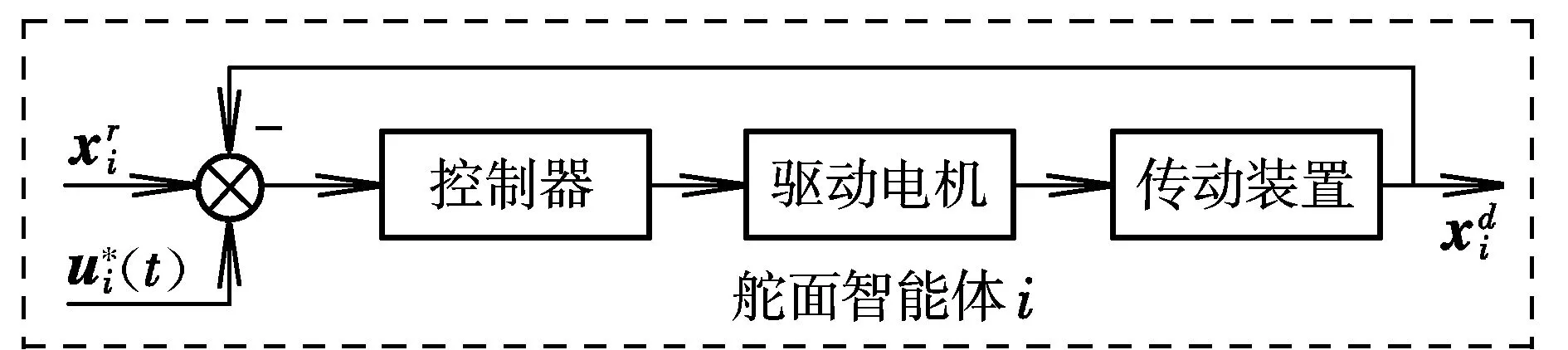
圖1 舵面智能體的基本組成Fig.1 Component of control surface agent

舵面智能體應(yīng)具有高度的自規(guī)劃、自組織、自適應(yīng)能力,以適應(yīng)復(fù)雜動(dòng)態(tài)環(huán)境中的工作,使其在能夠完成自身舵面偏轉(zhuǎn)驅(qū)動(dòng)的前提下,通過與其他舵面智能體的通信協(xié)作,提升舵面電力作動(dòng)系統(tǒng)整體的協(xié)調(diào)控制性能。舵面智能體主要由環(huán)境感知模塊、通信模塊、執(zhí)行模塊、控制模塊、規(guī)則庫(kù)等功能模塊組成,其功能框圖如圖2所示。
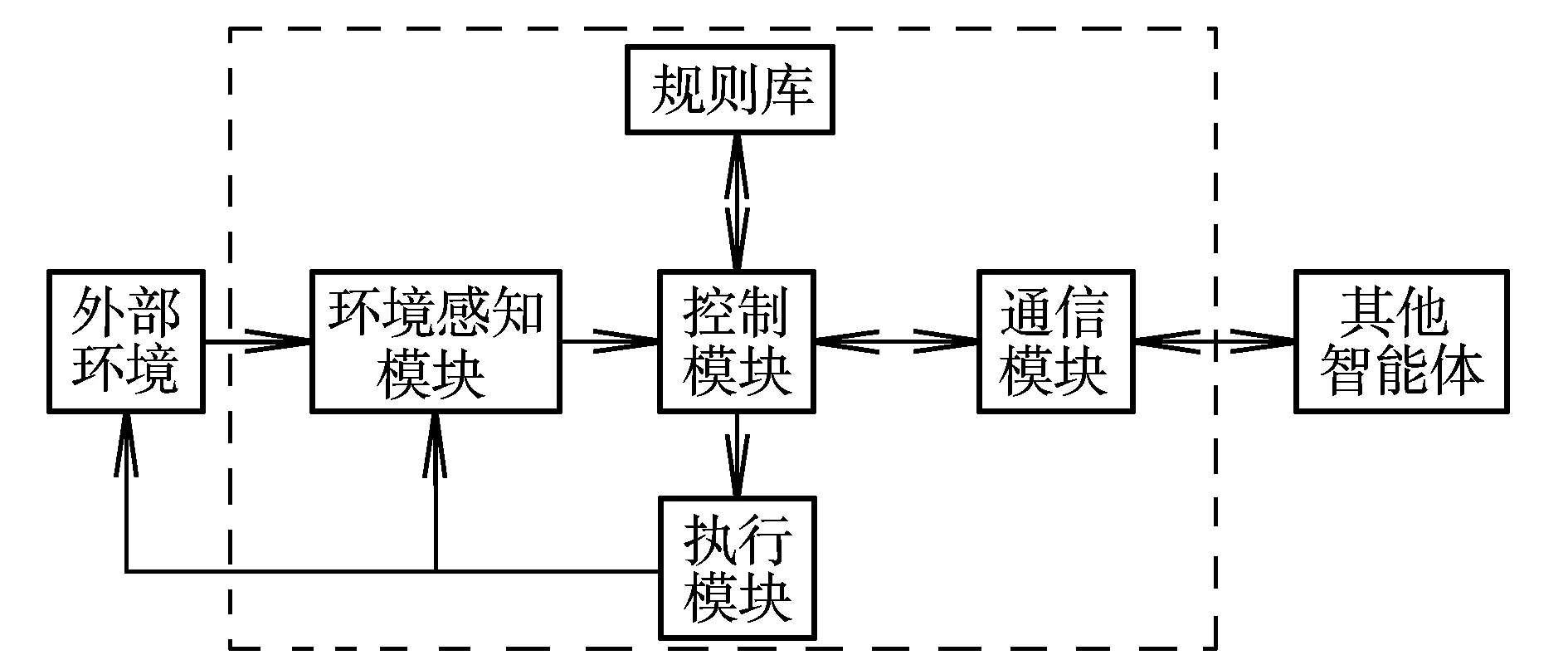
圖2 舵面智能體的功能框圖Fig.2 Functional block diagram of control surface agent
1.2 多智能體系統(tǒng)的結(jié)構(gòu)設(shè)計(jì)
以單個(gè)舵面智能體為基礎(chǔ),引入多智能體系統(tǒng)的概念,構(gòu)建分布式電力作動(dòng)系統(tǒng)的多智能體系統(tǒng)結(jié)構(gòu)。本文采用聯(lián)盟式的多智能體系統(tǒng)體系結(jié)構(gòu),對(duì)電力作動(dòng)系統(tǒng)的多智能體系統(tǒng)結(jié)構(gòu)進(jìn)行了設(shè)計(jì),如圖3所示。圖中:智能體間的連線代表通信的路徑;箭頭代表信息傳遞的方向。
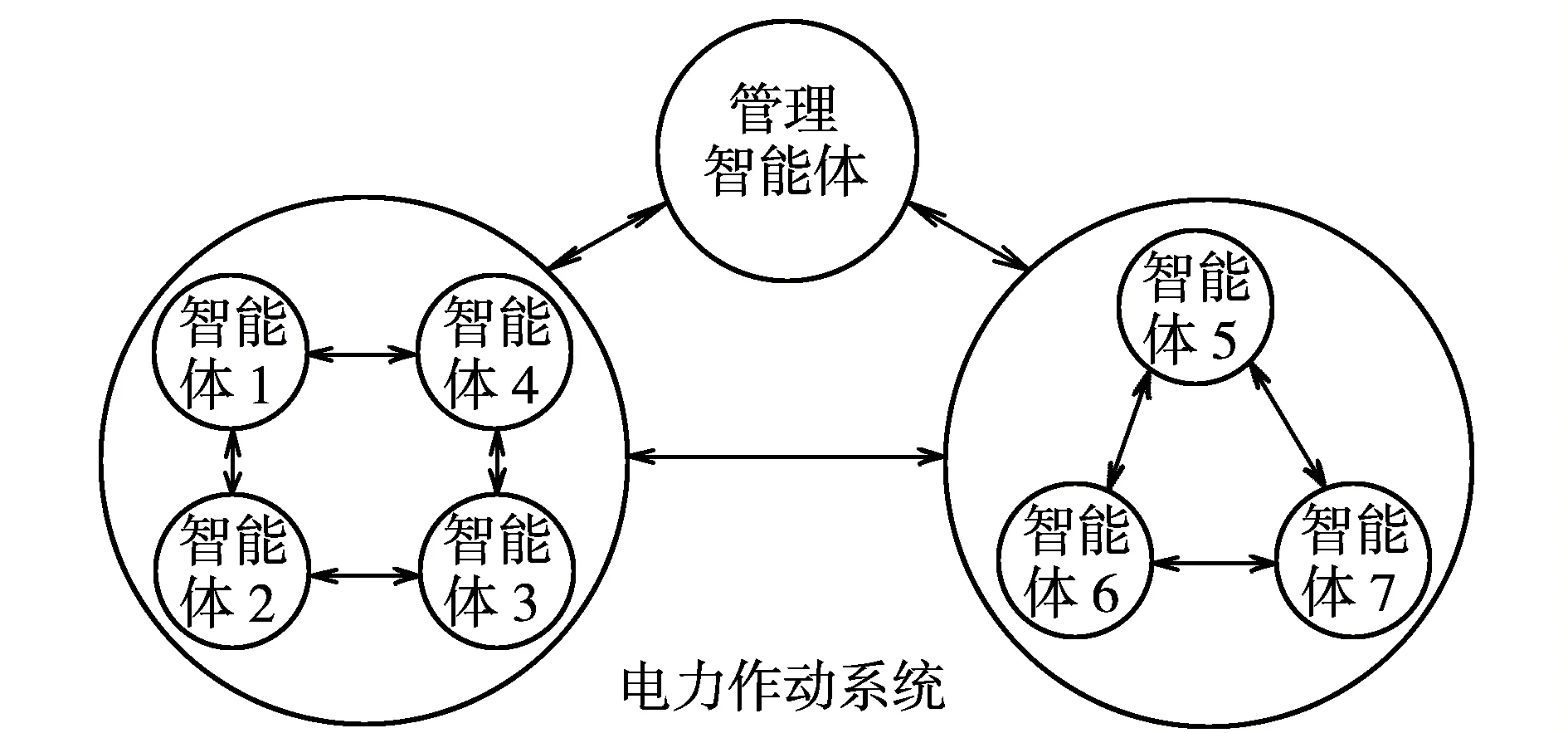
圖3 電力作動(dòng)系統(tǒng)的多智能體系統(tǒng)結(jié)構(gòu)Fig.3 The structure of multi-agent electromechanical actuation system
聯(lián)盟內(nèi)部舵面智能體的確定主要依據(jù)舵面安裝的特點(diǎn),即將同一個(gè)舵面內(nèi)的各分體式舵面組成同一個(gè)聯(lián)盟,各分體式舵面均由獨(dú)立的電力作動(dòng)器驅(qū)動(dòng),視為一個(gè)獨(dú)立的智能體,各分體式舵面智能體地位平等且相互獨(dú)立,彼此間通過分布式的局部通信實(shí)現(xiàn)信息的交互與協(xié)作。不同聯(lián)盟間通過協(xié)助智能體進(jìn)行遠(yuǎn)程通信,以實(shí)現(xiàn)信息的交互與協(xié)作,協(xié)助智能體可以由聯(lián)盟內(nèi)部任意分體式舵面智能體擔(dān)任。不同聯(lián)盟間協(xié)作關(guān)系的確定由上層管理智能體(飛控計(jì)算機(jī)或飛行控制與伺服控制分離下的電力作動(dòng)器智能控制中心)根據(jù)飛機(jī)當(dāng)前飛行狀態(tài)所需操縱舵面決定,是動(dòng)態(tài)變化的。
2 協(xié)調(diào)控制策略設(shè)計(jì)
2.1 分體式舵面同步聯(lián)動(dòng)控制策略
對(duì)于由n個(gè)分體式舵面智能體組成的舵面多智能體系統(tǒng),各分體式舵面智能體通過總線互連,并在局部分布式通信的基礎(chǔ)上,以舵面偏轉(zhuǎn)角度為協(xié)調(diào)變量,通過相互協(xié)作實(shí)現(xiàn)舵面偏轉(zhuǎn)角度的同步聯(lián)動(dòng),以取得原單體式舵面偏轉(zhuǎn)的氣動(dòng)效益。
定義協(xié)調(diào)變量為舵面偏轉(zhuǎn)角度θ,θi(t)為t時(shí)刻第i個(gè)分體式舵面智能體節(jié)點(diǎn)狀態(tài),一致性分散化協(xié)調(diào)控制策略可以表示為:
(1)
式中:γi為有向圖中邊的加權(quán)系數(shù);Ni為與第i個(gè)分體式舵面智能體節(jié)點(diǎn)所能獲相鄰分體式舵面智能體信息的狀態(tài)集合;gij為Ni相對(duì)應(yīng)的通信連接關(guān)系,其表示為:
分體式舵面智能體協(xié)調(diào)的目標(biāo)是使彼此間的信息狀態(tài)或行為達(dá)到一致,即各分體式舵面的偏轉(zhuǎn)能夠?qū)崿F(xiàn)同步。對(duì)于任意分體式舵面智能體節(jié)點(diǎn)i,j,如果滿足式(2),則稱i,j能夠協(xié)調(diào)一致,即:

(2)
圖3所示舵面多智能體系統(tǒng)協(xié)調(diào)控制結(jié)構(gòu),為任意節(jié)點(diǎn)相互可達(dá)的強(qiáng)連通圖,且含有有向生成樹,分散化協(xié)調(diào)控制策略一致性收斂,即各分體式舵面智能體的偏轉(zhuǎn)角度動(dòng)態(tài)收斂到γi的加權(quán)平均值:
(3)
由以上分析可以得出,在滿足圖3所示的協(xié)調(diào)控制結(jié)構(gòu)及式(1)的分散化協(xié)調(diào)策略的基礎(chǔ)上,舵面作動(dòng)系統(tǒng)的所有分體式舵面的偏轉(zhuǎn)角度能夠動(dòng)態(tài)收斂到式(3)所示的輸出結(jié)果,亦即分體式舵面能夠動(dòng)態(tài)的實(shí)現(xiàn)同步聯(lián)動(dòng)。
2.2 舵面協(xié)調(diào)控制策略
θA(t)=kθB(t)
(4)
式中:θA(t),θB(t)分別為t時(shí)刻不同舵面的偏轉(zhuǎn)角度;k∈R為舵面協(xié)調(diào)偏轉(zhuǎn)率。考慮A,B舵面系統(tǒng)分別為由nA,nB個(gè)分體式舵面智能體組成的多智能體系統(tǒng),不考慮舵面間協(xié)調(diào)控制時(shí),由式(1)可知,A,B舵面系統(tǒng)各自的分散化協(xié)調(diào)控制策略分別為:
(5)
對(duì)于不同的聯(lián)盟,A,B舵面多智能體系統(tǒng)均為含有有向生成樹的強(qiáng)連通圖,則由式(3)可知,A,B舵面系統(tǒng)的任意分體式舵面智能體節(jié)點(diǎn)的偏轉(zhuǎn)角度分別動(dòng)態(tài)收斂于:
(6)
當(dāng)舵面內(nèi)所有智能體狀態(tài)信息趨于一致,即舵面內(nèi)所有分體式舵面均為同步聯(lián)動(dòng),則任意分體式舵面智能體均能代表舵面的信息狀態(tài),即:
(7)
考慮舵面間協(xié)調(diào)控制的目的是使A,B舵面偏轉(zhuǎn)角度滿足式(4),亦即:

(8)
則式(5)中的分散化協(xié)調(diào)控制策略需調(diào)整為:
(9)
其中:
隨著信息技術(shù)發(fā)展速度的加快,現(xiàn)下社會(huì)的發(fā)展已離不開信息技術(shù)。教學(xué)的本質(zhì)是為社會(huì)發(fā)展培養(yǎng)高素養(yǎng)、高能力人才,在小學(xué)開展信息技術(shù)課程可以培養(yǎng)學(xué)生的信息素養(yǎng),全面提升學(xué)生綜合素養(yǎng),為學(xué)生以后的成長(zhǎng)和發(fā)展打下良好基礎(chǔ)。在新課程背景下,小學(xué)信息技術(shù)課程教學(xué)面臨著更大的挑戰(zhàn),教師要打破傳統(tǒng)的教學(xué)思維和模式,進(jìn)行創(chuàng)新教育,突出實(shí)踐教學(xué)的重要性,培養(yǎng)和提升學(xué)生的實(shí)踐操作能力。另外,教師還要提升教學(xué)效率和教學(xué)質(zhì)量,激發(fā)學(xué)生的學(xué)習(xí)興趣,培養(yǎng)和提升學(xué)生的主動(dòng)學(xué)習(xí)能力,為學(xué)生以后的學(xué)習(xí)和發(fā)展做好鋪墊。下文將簡(jiǎn)要探討小學(xué)信息技術(shù)創(chuàng)新教育的重要性,以及探究新課程背景下小學(xué)信息技術(shù)創(chuàng)新教育的有效對(duì)策。
式中:i=4,j=3分別為圖3中A,B舵面多智能體系統(tǒng)協(xié)助智能體的個(gè)數(shù);uA(t),uB(t)分別為舵面間的協(xié)調(diào)項(xiàng),用于協(xié)調(diào)不同舵面的偏轉(zhuǎn)角度,可以用如下公式表示:
(10)
令:
則滿足圖3所示舵面通信結(jié)構(gòu)的舵面多智能體系統(tǒng)能夠?qū)崿F(xiàn)協(xié)調(diào)控制。
3 仿真試驗(yàn)
3.1 仿真模型
假設(shè)所有舵面均由機(jī)電作動(dòng)器驅(qū)動(dòng),在Matlab/Simulink中搭建機(jī)電作動(dòng)器的仿真模型,搭建了A,B舵面電力作動(dòng)系統(tǒng)及其協(xié)調(diào)控制的系統(tǒng)仿真模型。舵面A協(xié)調(diào)控制仿真模型由4個(gè)分體式舵面仿真模塊組成,構(gòu)成舵面A聯(lián)盟式多智能體系統(tǒng)結(jié)構(gòu)。模型的建立主要借鑒了多電機(jī)相鄰偏差耦合控制的結(jié)構(gòu)[6],同步控制器為速度前饋PID控制器,偏差補(bǔ)償控制器為PID控制器。聯(lián)盟內(nèi)部分體式舵面智能體通過分布式的局部通信進(jìn)行協(xié)作,以實(shí)現(xiàn)同步聯(lián)動(dòng)。
舵面A,B組成的電力作動(dòng)系統(tǒng)協(xié)調(diào)控制仿真模型中,不同的舵面模型代表不同的聯(lián)盟,不同聯(lián)盟間通過協(xié)助分體式舵面智能體進(jìn)行遠(yuǎn)程通信,以一定的協(xié)調(diào)偏轉(zhuǎn)率進(jìn)行舵面偏轉(zhuǎn)角度的協(xié)調(diào)偏轉(zhuǎn)。仿真模型中取協(xié)調(diào)控制器為PID控制器。
假設(shè)機(jī)電作動(dòng)器與舵面通過鉸鏈連接,機(jī)電作動(dòng)器直線位移與舵面偏轉(zhuǎn)角度的關(guān)系為M=5 (°)/mm[7]。考慮舵面電力作動(dòng)系統(tǒng)的協(xié)調(diào)性會(huì)受各傳動(dòng)軸的驅(qū)動(dòng)特性不匹配、負(fù)載的擾動(dòng)、電機(jī)參數(shù)變化等因素的影響,而機(jī)電作動(dòng)器的工作特性主要由驅(qū)動(dòng)電機(jī)表征,各舵面電力作動(dòng)系統(tǒng)驅(qū)動(dòng)電機(jī)取不相同的工作參數(shù),用以模擬不同舵面電力作動(dòng)系統(tǒng)在實(shí)際工作過程中存在的差異。
3.2 分體式舵面同步聯(lián)動(dòng)控制試驗(yàn)
圖4為輸入階躍指令信號(hào)未進(jìn)行協(xié)調(diào)控制時(shí),舵面A各分體式舵面偏轉(zhuǎn)角度仿真曲線。從圖中可以看出,由于驅(qū)動(dòng)電機(jī)轉(zhuǎn)子端等效負(fù)載轉(zhuǎn)矩、阻尼系數(shù)等參數(shù)的差異,舵面A中各分體式舵面的偏轉(zhuǎn)角度存在一定的偏差,沒有滿足同步聯(lián)動(dòng)的作動(dòng)要求,降低了舵面的氣動(dòng)效益。圖5為進(jìn)行協(xié)調(diào)控制時(shí),舵面A各分體式舵面偏轉(zhuǎn)角度仿真曲線,圖中舵面A各分體式舵面偏轉(zhuǎn)角度協(xié)調(diào)一致,具有較好的同步聯(lián)動(dòng)控制性能。
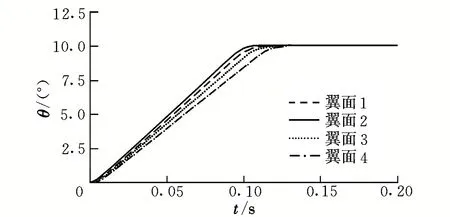
圖4 未進(jìn)行協(xié)調(diào)控制時(shí)舵面A分體式舵面偏轉(zhuǎn)角度曲線Fig.4 Split type control surface deflection angle curves of control surface A without coordinated control
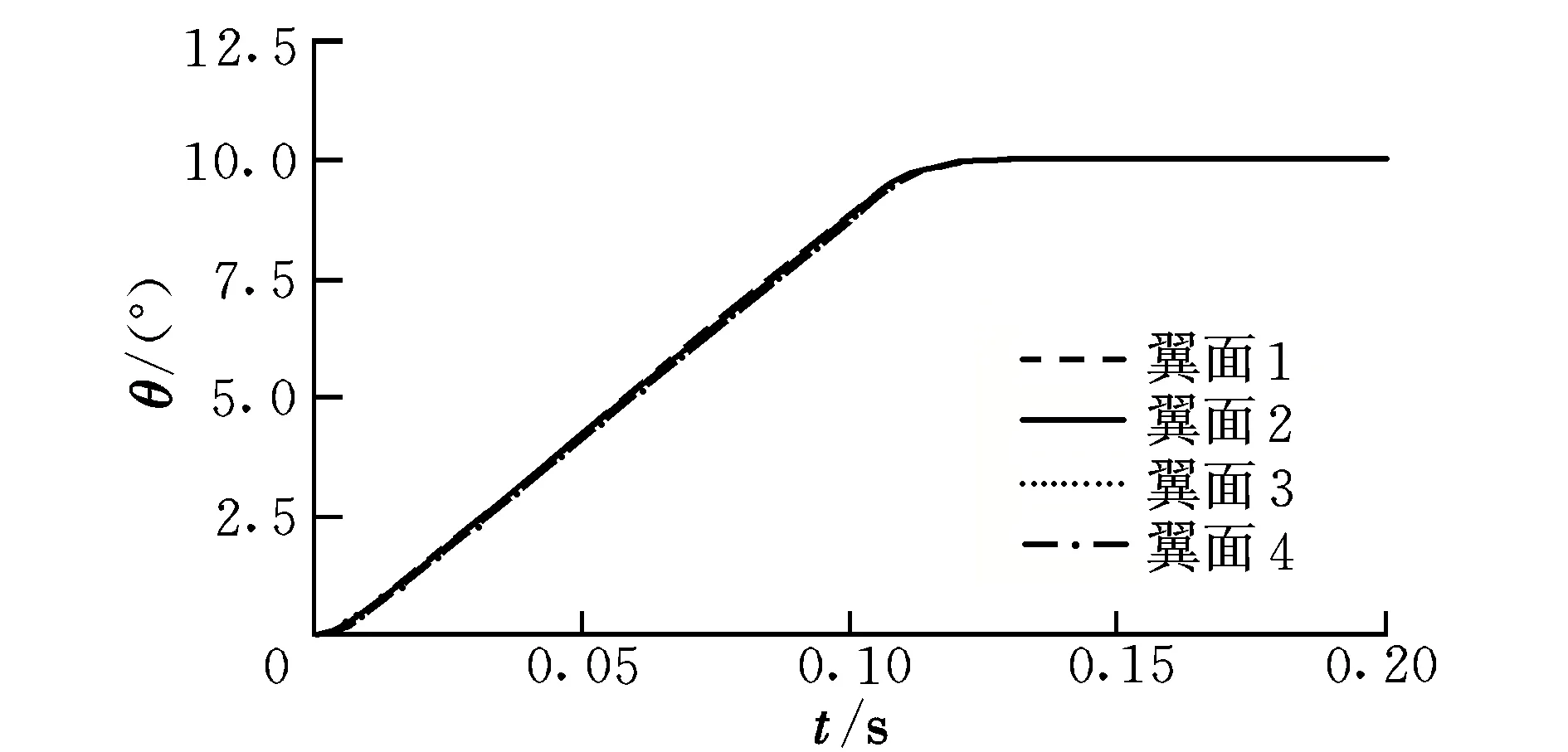
圖5 協(xié)調(diào)控制時(shí)舵面A分體式舵面偏轉(zhuǎn)角度曲線Fig.5 Split type control surface deflection angle curves of control surface A with coordinated control
圖6為兩種控制方式下,舵面A中分體式舵面2,4偏轉(zhuǎn)角度偏差對(duì)比曲線。可以看出,進(jìn)行協(xié)調(diào)控制時(shí)二者間的偏差要明顯小于未進(jìn)行協(xié)調(diào)控制,從而證明本文所設(shè)計(jì)的分體式舵面同步聯(lián)動(dòng)控制策略能夠改善分體式舵面的同步偏轉(zhuǎn)性能,提高分體式舵面偏轉(zhuǎn)的氣動(dòng)效益。
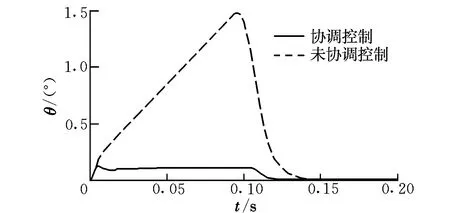
圖6 分體式舵面2,4偏轉(zhuǎn)角度偏差對(duì)比曲線Fig.6 Deflection angle deviation curves of split type control surface 2 and 4
3.3 舵面協(xié)調(diào)控制試驗(yàn)
取舵面協(xié)調(diào)偏轉(zhuǎn)率k=2,輸入斜坡指令信號(hào),斜率分別為:RA=18,RB=9,舵面內(nèi)各分體式舵面協(xié)調(diào)控制,并在0.1 s時(shí)給舵面A中分體式舵面2突加模擬負(fù)載。任取舵面A,B中一分體式舵面偏轉(zhuǎn)狀態(tài)表征舵面A,B實(shí)際偏轉(zhuǎn),舵面間不進(jìn)行協(xié)調(diào)控制和進(jìn)行協(xié)調(diào)控制的偏轉(zhuǎn)角度仿真曲線如圖7和圖8所示。
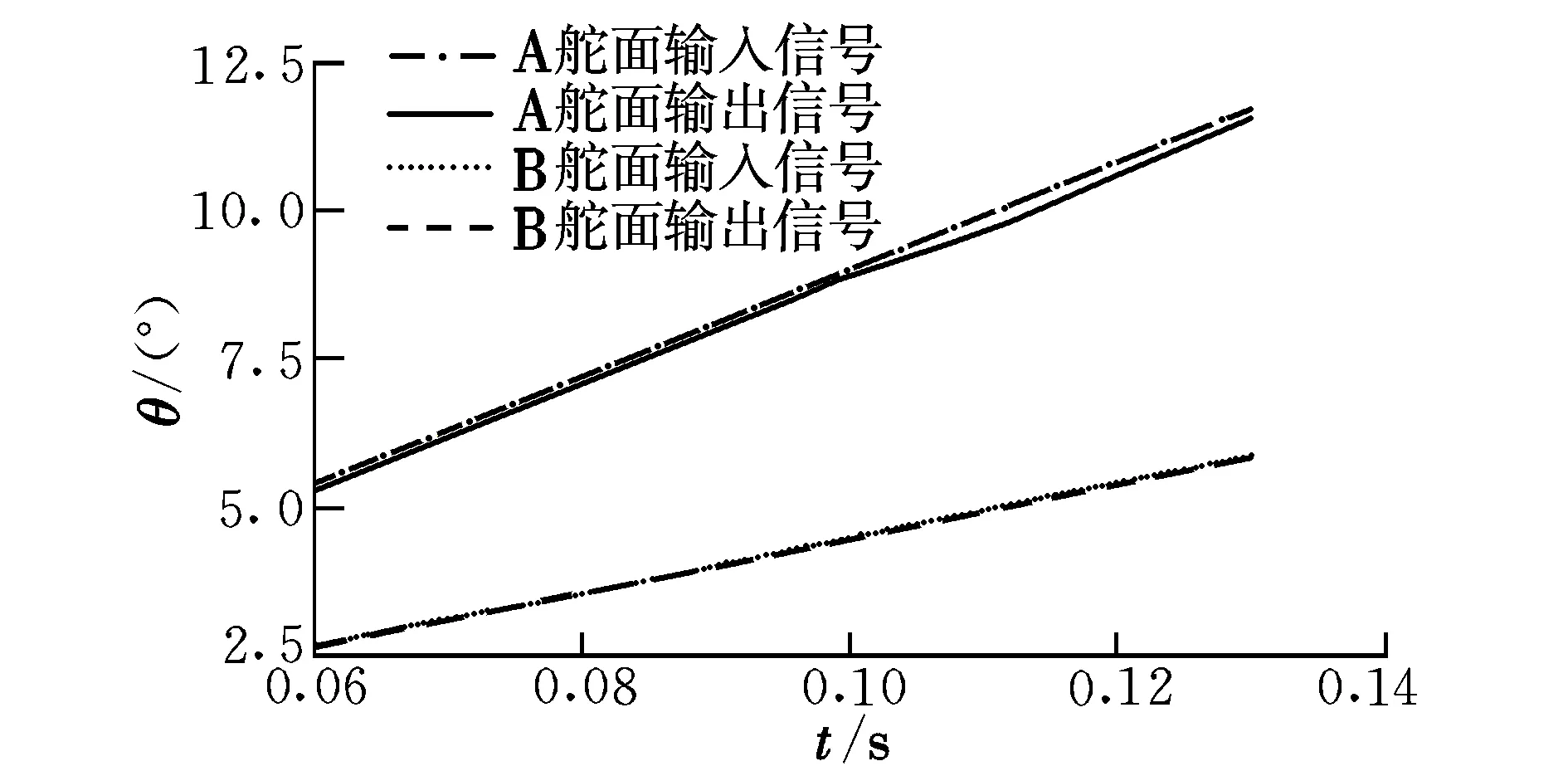
圖7 未進(jìn)行協(xié)調(diào)控制時(shí)A,B舵面偏轉(zhuǎn)角度曲線Fig.7 Deflection angle curves of control surface A and B without coordinated control
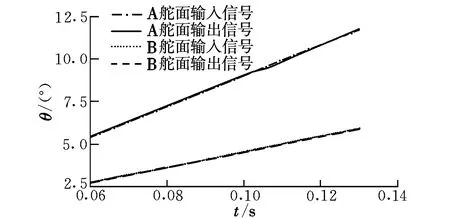
圖8 協(xié)調(diào)控制時(shí)A,B舵面偏轉(zhuǎn)角度曲線Fig.8 Deflection angle curves of control surface A and B with coordination control
從圖7中可以看出,舵面間未進(jìn)行協(xié)調(diào)控制時(shí),舵面A偏轉(zhuǎn)角度曲線無法準(zhǔn)確跟蹤指令信號(hào),且易受負(fù)載擾動(dòng)的影響,舵面B則能較好地跟蹤指令信號(hào),但舵面A受擾動(dòng)引起的偏轉(zhuǎn)狀態(tài)的變化無法傳遞到舵面B中。圖8中,舵面間進(jìn)行協(xié)調(diào)控制,舵面A偏轉(zhuǎn)角度曲線較好地跟蹤指令信號(hào),并通過與舵面B的協(xié)作有效地抑制了舵面負(fù)載擾動(dòng)對(duì)舵面偏轉(zhuǎn)的影響。
圖9為兩種控制方式下,舵面協(xié)調(diào)偏轉(zhuǎn)率的對(duì)比曲線。可以看出,采用協(xié)調(diào)控制的舵面協(xié)調(diào)偏轉(zhuǎn)率曲線能夠更加快速、準(zhǔn)確地收斂到給定的舵面協(xié)調(diào)偏轉(zhuǎn)狀態(tài),并能有效抑制舵面負(fù)載干擾引起的協(xié)調(diào)偏轉(zhuǎn)率波動(dòng)。結(jié)果表明,舵面協(xié)調(diào)控制策略提高了舵面協(xié)調(diào)偏轉(zhuǎn)的準(zhǔn)確性。
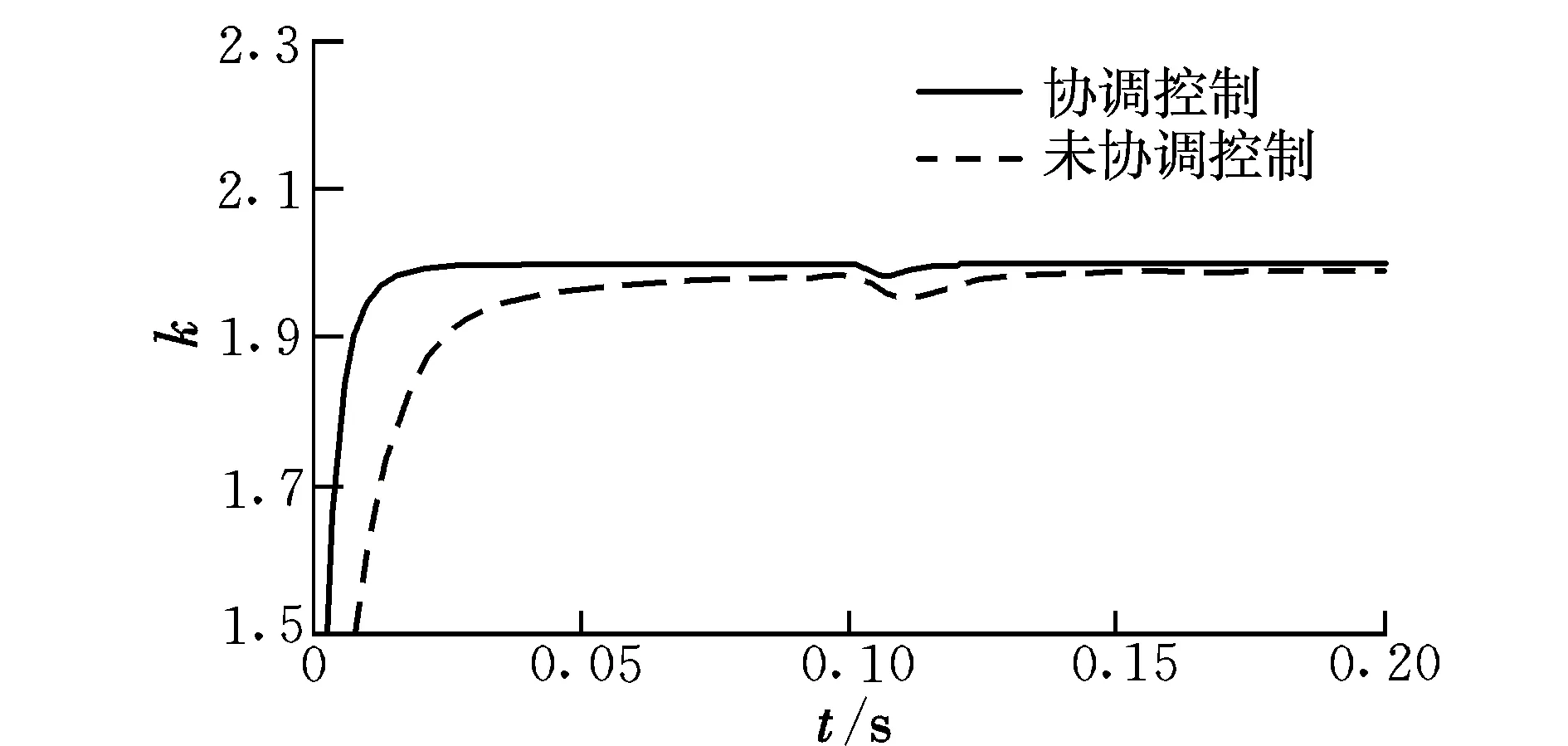
圖9 協(xié)調(diào)偏轉(zhuǎn)率k對(duì)比曲線Fig.9 Curves of deflection rate k
4 結(jié)束語(yǔ)
本文根據(jù)多舵面飛機(jī)電力作動(dòng)系統(tǒng)結(jié)構(gòu)特征,結(jié)合多智能體系統(tǒng)構(gòu)建分體式電力作動(dòng)系統(tǒng)的多智能體系統(tǒng)結(jié)構(gòu),并設(shè)計(jì)了分體式舵面同步聯(lián)動(dòng)控制策略及舵面偏轉(zhuǎn)控制策略。本文提出的協(xié)調(diào)控制策略提高了多舵面電力作動(dòng)系統(tǒng)協(xié)調(diào)控制的準(zhǔn)確性;由于各舵面作動(dòng)節(jié)點(diǎn)均為智能體,能夠自主地進(jìn)行通信協(xié)作,該控制策略也能有效地提高舵面電力作動(dòng)系統(tǒng)的智能性及自動(dòng)化程度。此外,本文僅針對(duì)兩個(gè)舵面的協(xié)調(diào)控制進(jìn)行了研究,但研究成果完全可以適用于多個(gè)舵面協(xié)調(diào)控制的情況。
[1] 嚴(yán)仰光,秦海鷗,龔春英,等.多電飛機(jī)與電力電子[J].南京航空航天大學(xué)學(xué)報(bào),2014,46(1):11-18.
[2] Chakraborty I,Jackson D,Trawick D,et al.Electric control surface actuator design optimization and allocation for the more electric aircraft[R].AIAA-2013-4283,2013.
[3] 占正勇,劉林.分布式電傳飛行控制系統(tǒng)結(jié)構(gòu)發(fā)展分析[J].飛行力學(xué),2009,27(6):1-4.
[4] 張巍,朱耀忠.“多電”控制舵面作動(dòng)器——下一代運(yùn)輸機(jī)的一個(gè)方案[J].電力電子,2006(4):15-18.
[5] Wang J,Xin M.Flocking of multi-agent system using a unified optimal control approach[J].Journal of Dynamic Systems,Measurement,and Control,2013,135(6):5-11.
[6] 劉艷.多電機(jī)同步控制系統(tǒng)控制策略研究[D].沈陽(yáng):沈陽(yáng)工業(yè)大學(xué),2013.
[7] Chakraborty I,Jackson D,Trawick D,et al.Development of a sizing and analysis tool for electro hydrostatic and electromechanical actuators for the more electric aircraft[R].AIAA-2013-4282,2013.
(編輯:李怡)
《飛行力學(xué)》正式開通在線辦公系統(tǒng)
為加快科技期刊信息化建設(shè)步伐,實(shí)現(xiàn)期刊數(shù)字化出版和網(wǎng)絡(luò)化傳播,《飛行力學(xué)》編輯部于2015年8月已正式開通在線辦公系統(tǒng)(網(wǎng)址為:http://fhlx.cbpt.cnki.net)。該系統(tǒng)具有作者在線投稿、編輯在線采編、專家在線審稿等功能。
投稿過程簡(jiǎn)單方便。首次在線投稿時(shí),請(qǐng)先在該網(wǎng)站進(jìn)行注冊(cè),并按要求填寫相關(guān)信息,注冊(cè)成功后方可投稿。投稿時(shí),請(qǐng)務(wù)必認(rèn)真閱讀《征稿簡(jiǎn)則》、《版權(quán)協(xié)議》等資料,然后按要求填寫并上傳《版權(quán)協(xié)議》,同時(shí)上傳原稿全文和保密審查證明。
歡迎大家使用作者投稿系統(tǒng)。投稿過程中,若遇到其他疑問請(qǐng)聯(lián)系編輯部(Tel:029-86838449;Email:fxlxbjb@163.com)進(jìn)行咨詢。
《飛行力學(xué)》編輯部
Research on coordinated control strategy of electromechanical actuation system for multiple control surfaces aircraft
LI Cheng-mao, SHI Shan, LIU De-peng
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
With the changes in the structure of the layout of large aircraft control surfaces, the traditional centralized structure of the flight control system can not meet accuracy requirements in the rudder coordination process. To solve this problem, the concept of multi-agent was introduced and a single rudder was equivalent to an intelligent agent to build a distributed multi-agent system structure of electromagnetic actuation system. The coordinated control strategy of split type actuator synchronous linkage control and the control surface coordinated control respectively were designed with federated architecture, and the simulation model was established. Simulation results show that the rudder can accurately converge to a given coordinate rudder deflection state, and the strategy effectively suppress interference caused by fluctuations in load rudder deflection rate coordination, solved the problem of poor coordinated control surface accuracy of traditional flight control system.
multiple control surfaces; multi-agent; electromechanical actuation system; coordinated control
2015-01-12;
2015-04-30;
時(shí)間:2015-06-24 15:03
李成茂(1990-),男,湖北黃石人,碩士研究生,研究方向?yàn)轱w行控制及仿真。
V227
A
1002-0853(2015)05-0476-05
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
表面工程與再制造(2019年6期)2019-08-24 06:40:04
山東冶金(2019年3期)2019-07-10 00:54:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
