欠驅(qū)動式手指康復訓練裝置的結(jié)構(gòu)優(yōu)化設計
2015-03-14 03:19:18鄭楊陳壘王剛劉新蓉董曉彤王玨
西安交通大學學報 2015年3期
關(guān)鍵詞:機械
鄭楊,陳壘,王剛,劉新蓉,董曉彤,王玨
(1.西安交通大學生物醫(yī)學信息工程教育部重點實驗室,710049,西安; 2.國家保健器具工程技術(shù)研究中心西安交通大學分部,710049,西安)
?
欠驅(qū)動式手指康復訓練裝置的結(jié)構(gòu)優(yōu)化設計
鄭楊1,2,陳壘1,2,王剛1,2,劉新蓉1,2,董曉彤1,2,王玨1,2
(1.西安交通大學生物醫(yī)學信息工程教育部重點實驗室,710049,西安; 2.國家保健器具工程技術(shù)研究中心西安交通大學分部,710049,西安)
為了使欠驅(qū)動式手指康復訓練裝置可提供的手指關(guān)節(jié)活動范圍滿足訓練需求,以某一連桿機構(gòu)為例,通過分析運動學模型空間狀態(tài)進行結(jié)構(gòu)優(yōu)化。首先建立機械機構(gòu)與手指的簡化空間模型,以關(guān)鍵構(gòu)件及手指關(guān)節(jié)的旋轉(zhuǎn)角度作為空間向量元素,求得某一機械尺寸及手指長度下所有可能的空間向量,形成空間狀態(tài)集;然后通過考察空間狀態(tài)集選擇最佳機構(gòu)尺寸,使得手指關(guān)節(jié)活動范圍滿足訓練需求。仿真及樣機佩戴測試結(jié)果表明,經(jīng)過優(yōu)化設計后的連桿式機構(gòu)能夠輔助手指在所需的關(guān)節(jié)活動范圍內(nèi)進行屈曲伸展運動,對手指長度變化的適應能力較強。所提結(jié)構(gòu)優(yōu)化方法對于欠驅(qū)動式肢體康復訓練裝置的結(jié)構(gòu)優(yōu)化設計具有一定的參考價值。
手指康復;欠驅(qū)動;結(jié)構(gòu)優(yōu)化;終端牽拉
康復訓練機器人可以輔助患者進行肢體關(guān)節(jié)活動,其優(yōu)點是可以保證穩(wěn)定的訓練效率和強度,能夠提供與訓練效果相關(guān)的客觀評價參數(shù)[1]。研究表明,康復訓練機器人能夠顯著改善患者的肢體運動功能[2]。欠驅(qū)動式機器人是指獨立控制輸入少于系統(tǒng)自由度的機器人,可用于手指關(guān)節(jié)的康復訓練。欠驅(qū)動式康復訓練機器人通常以“握手”的形式牽拉手指終端,從而帶動手指各個關(guān)節(jié)的運動[3-5]。由于手指運動的不確定度更多,穿戴這種設備的時間是最少的[6],因此在臨床上的應用較多。由于欠驅(qū)動式機器人通常帶有一個或多個可自由轉(zhuǎn)動的被動關(guān)節(jié),因此自身的運動具有一定的不確定度,這種不確定度使得即使在佩戴后手指關(guān)節(jié)仍可在一定范圍內(nèi)自主運動,從而減小了在突發(fā)痙攣時機械機構(gòu)對手指造成的傷害。
康復訓練機器人需要帶動手指在足夠大的關(guān)節(jié)活動范圍內(nèi)進行訓練,這對于防止關(guān)節(jié)粘連具有重要意義[7]。當欠驅(qū)動式機器人以終端牽拉的形式帶動手指進行關(guān)節(jié)訓練時,手指各關(guān)節(jié)的活動范圍實際是由機械機構(gòu)及手指骨共同組成的運動學模型來確定的,任何一個因素的改變都可能改變最終手指關(guān)節(jié)的活動范圍。這就對機械結(jié)構(gòu)提出了兩個層次的要求:首先,對于給定的某一手指長度,機械結(jié)構(gòu)應保證在此運動學模型下有足夠的手指關(guān)節(jié)活動范圍;其次,當手指長度發(fā)生變化時,機械結(jié)構(gòu)應能(或通過簡單調(diào)節(jié)后)重新建立與之匹配的運動學模型,保證所需的指關(guān)節(jié)活動范圍。本文利用欠驅(qū)動連桿機構(gòu)設計了一種終端牽拉式五手指康復訓練裝置,通過對機械結(jié)構(gòu)及手指骨構(gòu)成的運動學模型進行分析,得到機械機構(gòu)及手指所有可能的空間狀態(tài),即空間狀態(tài)集,通過考察空間狀態(tài)集來確定與手指相匹配的最佳機械結(jié)構(gòu)尺寸。同時,通過觀察不同手指長度下空間狀態(tài)集的變化規(guī)律,證明了所設計的機構(gòu)能夠適應手指長度的變化,始終保持所需的手指關(guān)節(jié)活動范圍。
1 結(jié)構(gòu)設計與運動學分析
1.1 結(jié)構(gòu)設計
與手指運動相關(guān)的手部骨骼主要包括掌骨、近指骨、中指骨及遠指骨(見圖1),并依次由掌指關(guān)節(jié)、近端指關(guān)節(jié)和遠端指關(guān)節(jié)連接。依據(jù)手指關(guān)節(jié)運動規(guī)律,設計了四連桿終端牽拉式手指康復訓練裝置,由直線電機、弧形架、連桿及指套構(gòu)成,連接點G、K、B、A、F均為鉸鏈結(jié)構(gòu)。A點有限位銷,用于限定弧形架與連桿間的夾角范圍,防止沿連桿方向的推力過小甚至消失。弧形架、連桿及指套構(gòu)成3自由度系統(tǒng),1個獨立的輸入控制量,因此屬于欠驅(qū)動式系統(tǒng),其終端運動具有一定的不確定度。當指套與遠指骨固定后,手指及機械機構(gòu)共同構(gòu)成了六連桿結(jié)構(gòu),決定了手指關(guān)節(jié)的活動范圍。
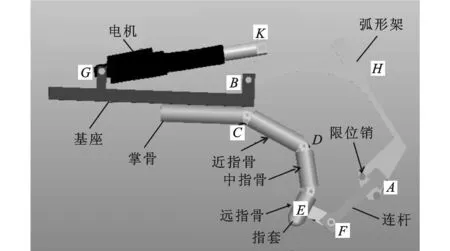
圖1 手指關(guān)節(jié)示意圖與康復訓練裝置設計模型
1.2 運動學分析
康復訓練裝置必須能夠帶動手指在所需的范圍內(nèi)進行屈曲伸展運動,這需要對機械構(gòu)件的各個尺寸進行優(yōu)化設計。將圖1中手指及前端機械構(gòu)件(弧形架BA段、連桿及指套)簡化為圖2所示的運動學模型。C、D兩點分別位于掌指關(guān)節(jié)與近端指關(guān)節(jié)轉(zhuǎn)軸中心,E位于指套與手指終端接觸點,且指套與遠指骨相互垂直。由于遠端指骨較短,所以為了便于計算忽略其長度。角β、γ分別為掌指關(guān)節(jié)和近端指關(guān)節(jié)的彎曲角度,弧形架轉(zhuǎn)動角度用α表示,弧形架與連桿間夾角用δ表示,則向量(β0,γ0,α0,δ0)實際代表了手指及前端機械構(gòu)件的空間狀態(tài),所有存在的空間狀態(tài)構(gòu)成狀態(tài)集M。對機械構(gòu)件尺寸進行優(yōu)化設計的目的是使M包含手指在屈曲伸展過程中所有可能的空間狀態(tài)。
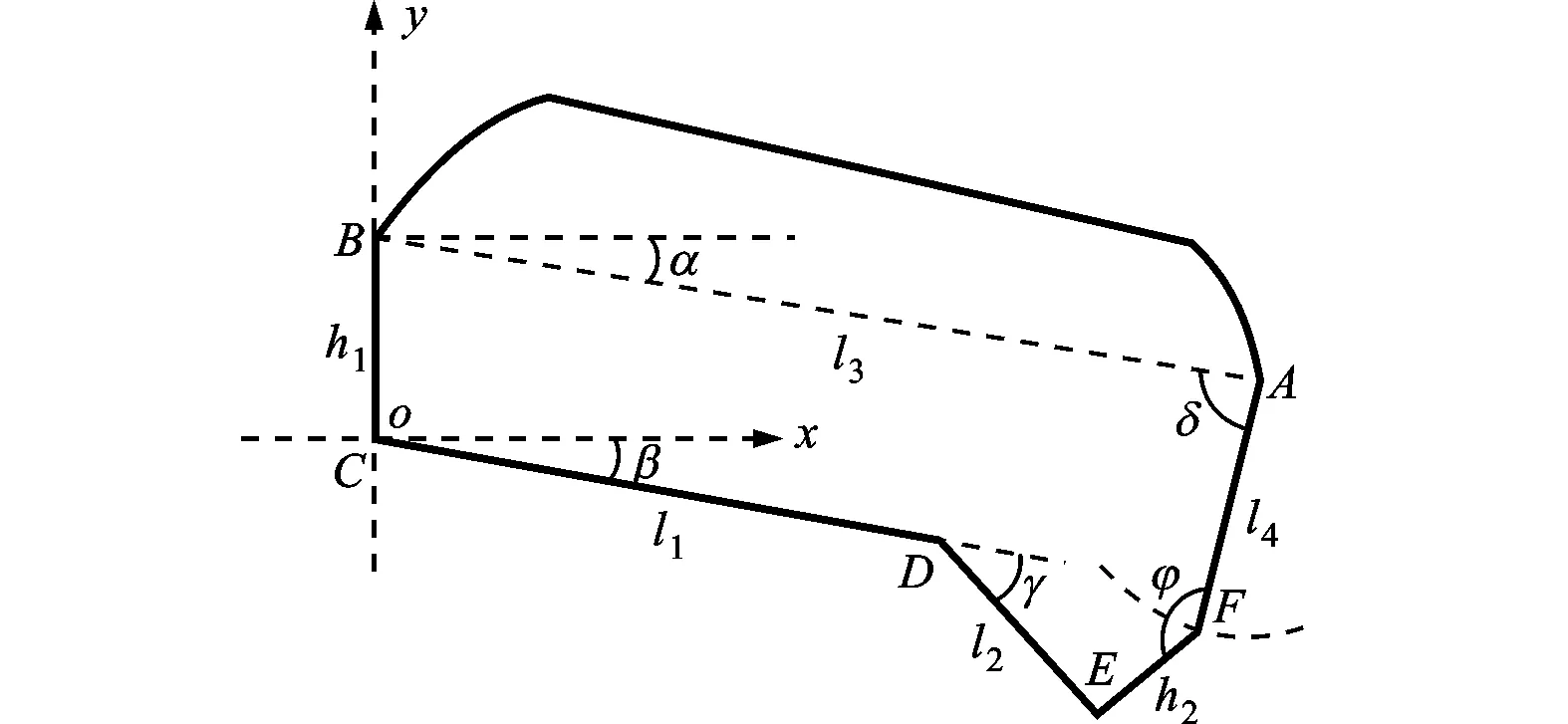
圖2 手指及前端機械構(gòu)件簡化運動模型
當電機做伸縮運動時,改變α值,A點坐標可由α唯一確定
(1)
A點由鉸鏈連接,因此連桿與弧形架間可發(fā)生自由轉(zhuǎn)動,又由于限位銷的存在,因此有
δmin≤δ≤δmax
(2)
F點位置由δ確定,可通過方程組求得
(3)

(4)
由E點到D點及F點的距離關(guān)系可知
(5)
式(5)中兩不等式依據(jù)人手指骨骼結(jié)構(gòu)特點及D、E、F3點的位置關(guān)系得到,a、b和c為D、F點所確定的直線方程ax+by+c=0,a>0的系數(shù)。
綜上所述,手指關(guān)節(jié)及前端機械構(gòu)件的狀態(tài)空間集求解過程為:①給定某一α值,求得A點坐標;②給定某一δ值,求得F點坐標;③由F點坐標確定D、E點位置,由式(5)可知,其解的個數(shù)可能為1、2或者0,其中0表示此種狀態(tài)不存在;④當狀態(tài)存在時,由各點坐標求得角度β、γ;⑤在[δmin,δmax]內(nèi),令δ=δ+Δδ,重復過程②③④;⑥令α=α-Δα,重復過程②③④⑤。經(jīng)過上述過程,求得所有可能的向量(β,γ,α,δ)構(gòu)成的空間狀態(tài)集。
手指及前端機械構(gòu)件的空間狀態(tài)集M由式(1)~式(5)確定,此狀態(tài)集中α受電機直接控制。弧形架的轉(zhuǎn)動范圍越大,空間狀態(tài)集越大,包含所有手指空間狀態(tài)的可能性越大。然而,由于直線電機可推動弧形架轉(zhuǎn)動的角度有限,因此需要對機械構(gòu)件后端(電機、弧形架KB段及基座)進行結(jié)構(gòu)優(yōu)化設計,使得電機推動弧形架轉(zhuǎn)動的角度滿足前端所需。圖3所示是電機及機械構(gòu)件后端的運動學模型,其中K1、K2分別為電機完全回縮及伸出時的終端位置,θ1、θN分別為完全回縮與伸出時KB段與x軸的夾角,則電機實際可推動弧形架轉(zhuǎn)動的角度為θ1-θN。
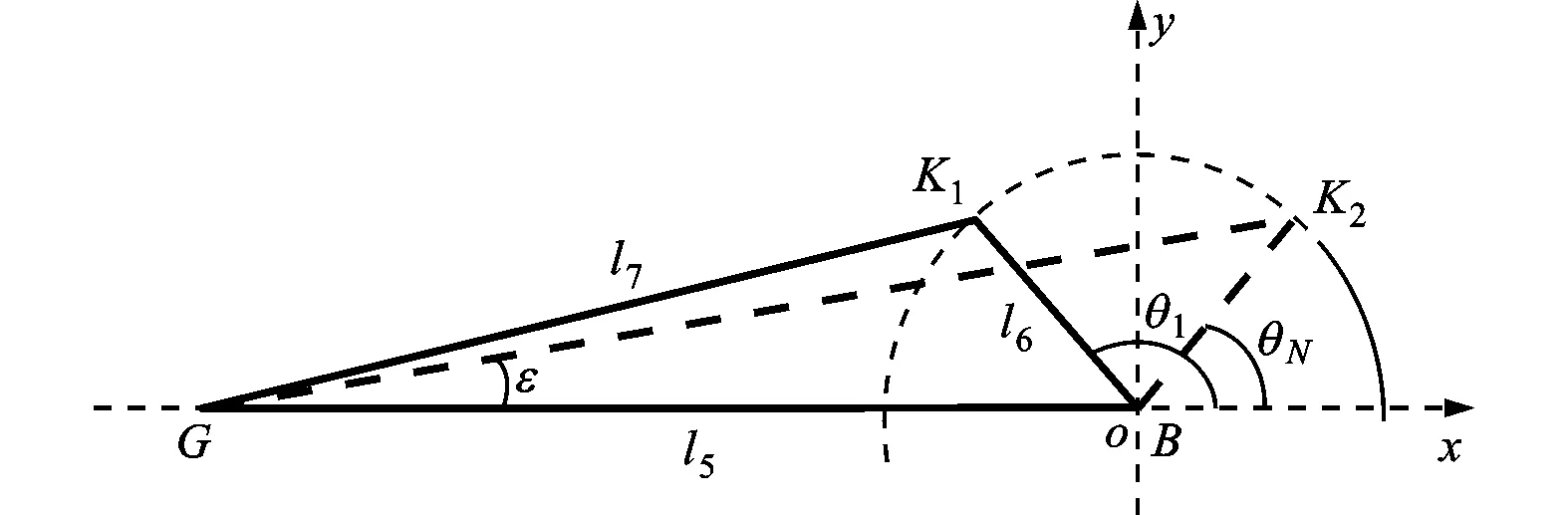
圖3 手指及后端機械構(gòu)件簡化運動模型
由圖3可知,各點坐標滿足方程
(6)
(7)
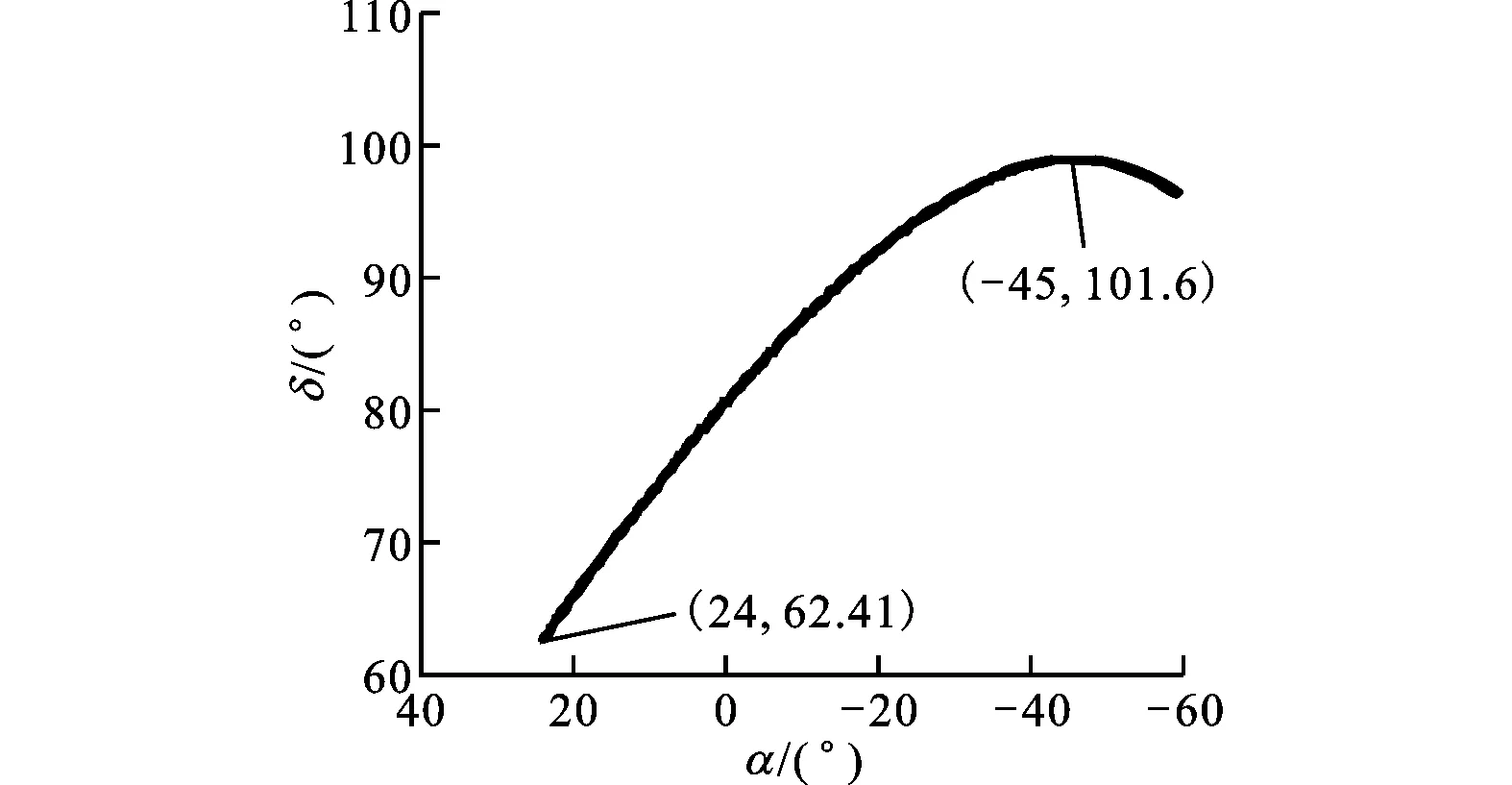
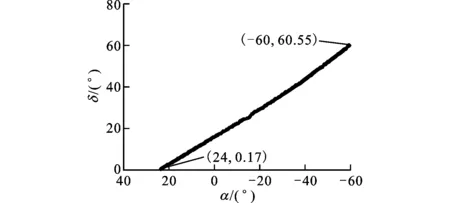
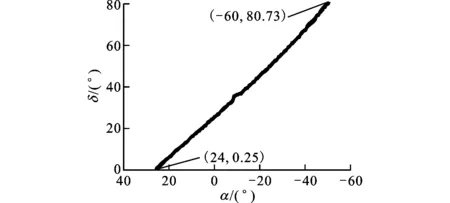
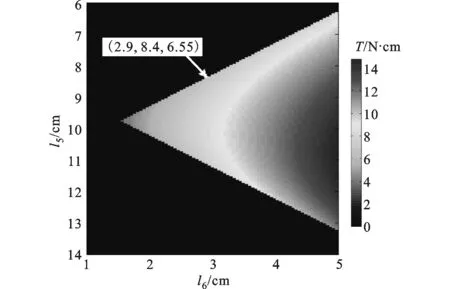
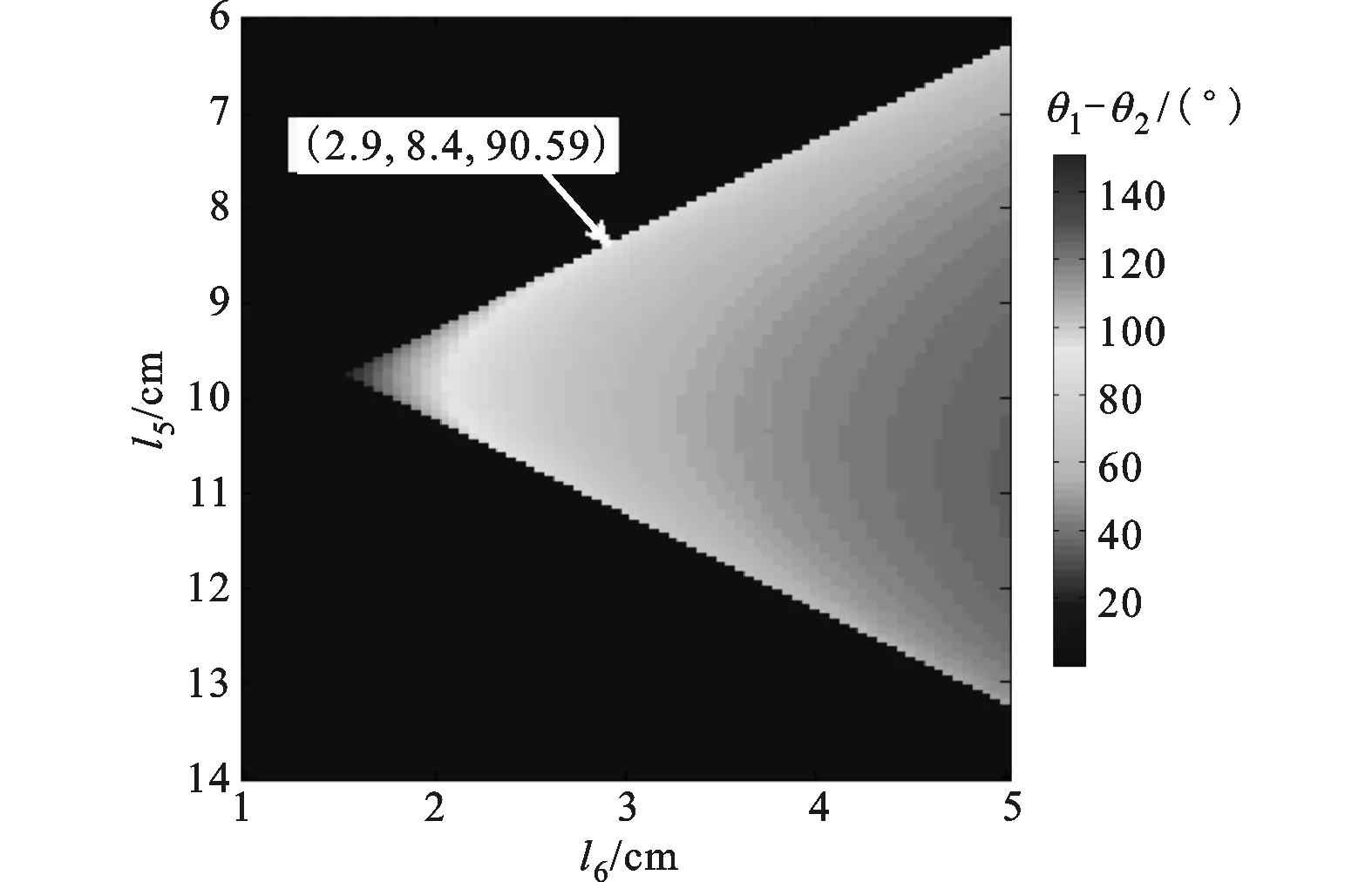
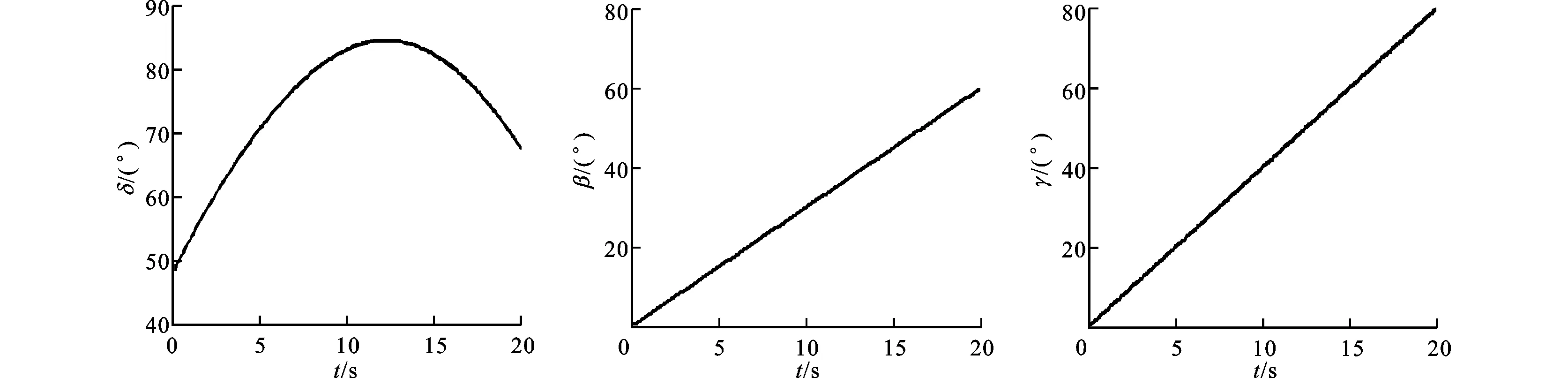
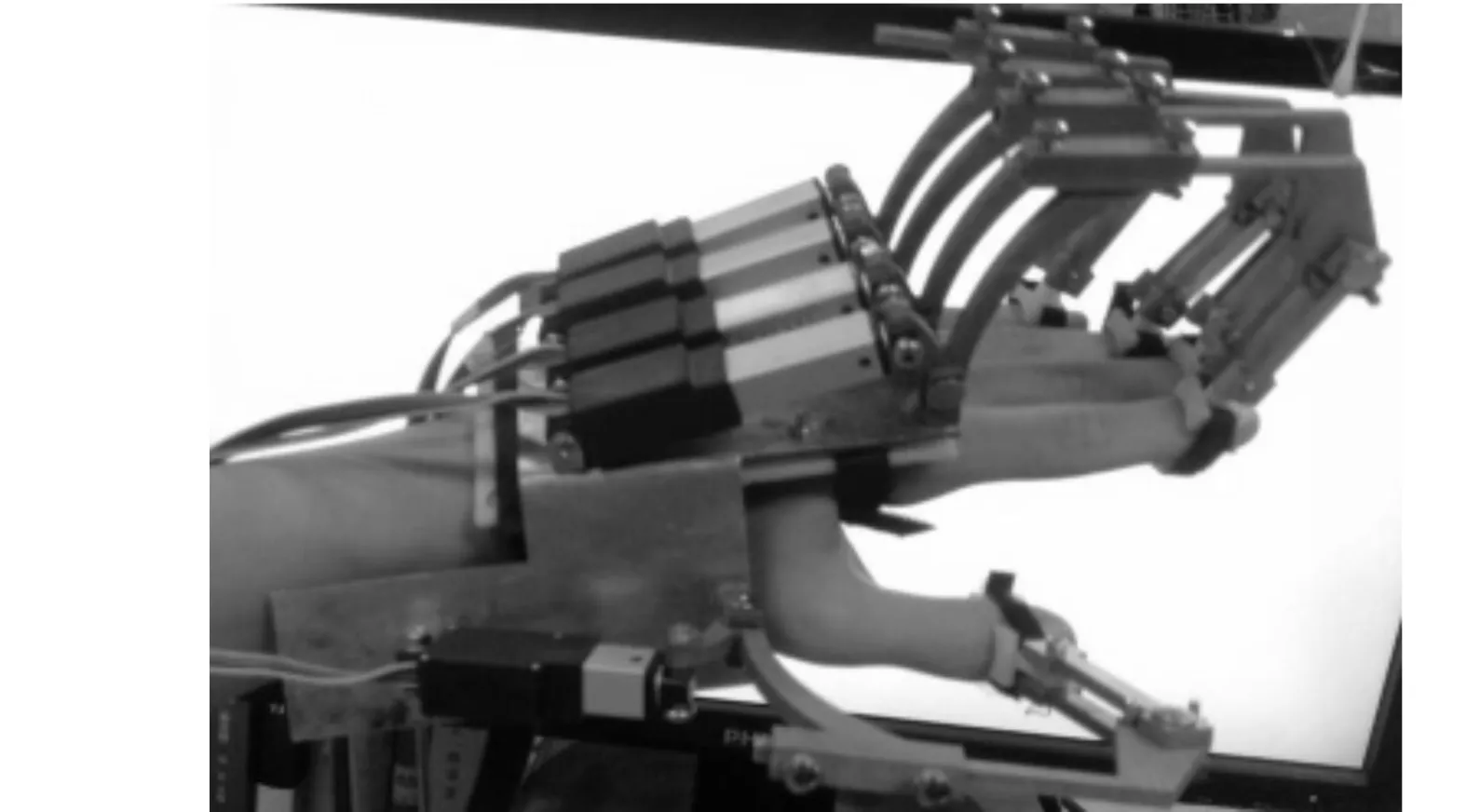
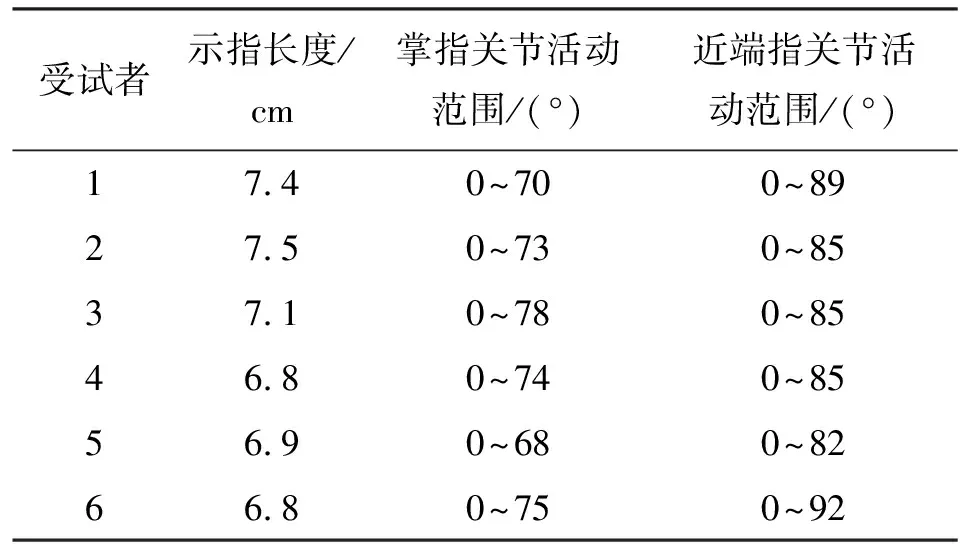
考慮到訓練裝置的可穿戴性,其尺寸大小應該有所限定,因此應有l(wèi)5min (8) 式中:f為電機輸出力,且為定值;h為直線GK到原點B的距離。 2.1 空間狀態(tài)集分析 對于特定的手指長度,利用Matlab進行數(shù)值計算,求解不同尺寸機械構(gòu)件下運動學模型的M,找尋某一尺寸組合使得M包含手指屈伸過程中所有可能的空間狀態(tài)。對于給定的手指長度l1、l2,需要確定機械構(gòu)件尺寸l3,l4、h1及h2。由于變量較多,可以通過某些構(gòu)件的實際情況進行預先的尺寸設定。考慮到設備的可穿戴性及美觀性,應盡量減小h1、h2,同時為避免機械沖突,設定h1=2.5 cm,h2=2 cm。依據(jù)初步計算結(jié)果,l4=4 cm通常可取得較好效果。以l1=4.5 cm、l2=3 cm、60°≤δ≤120°為例,求得在式(1)~式(5)限定下不同l3所對應的M,僅取其中的β及γ、繪制手指空間狀態(tài)圖,如圖4所示(陰影部分)。設定手指完全伸展時β與γ均為0°,圖4中(0,0)點,而目標屈曲狀態(tài)時β與γ分別為60°、80°,即圖4中(60,80)點。從計算結(jié)果可以看出:當l3≤7.5 cm時,手指無法達到目標屈曲狀態(tài);當l3≥9 cm時,手指無法達到完全伸展狀態(tài);當8 cm≤l3≤8.5 cm時,對于當前給定的手指長度,手指可在完全伸展及目標屈曲狀態(tài)間運動。 圖4 不同弧形架長度對應的手指空間狀態(tài) M包含了弧形架轉(zhuǎn)動過程中所有可能的手指及機械構(gòu)件空間狀態(tài)。為了觀察各個角度隨弧形架轉(zhuǎn)動的變化情況,不失一般性地選擇從伸展狀態(tài)(0,0)點到目標屈曲狀態(tài)(60,80)點的直線L作為手指狀態(tài)變化的軌跡。利用空間狀態(tài)搜尋法來實現(xiàn)這一過程,僅考察元素β、γ,找尋M中離伸展狀態(tài)(0,0)點最近的點m0,并記錄α的值為弧形架的初始狀態(tài)α0。在第i(i=1,2,3,…)步中,令αi=α0-iα,找尋M中元素α等于αi且離直線L最近(僅考察元素β、γ)的點mi,直至達到目標屈曲狀態(tài)(60,80)點。 由上述所得的一系列狀態(tài)點可得夾角δ及角度β、γ隨α變化的曲線,如圖5所示。β從0.17°變化到60.55°(見圖5b),γ從0.25°變化到80.73°(見圖5c),δ在60°與120°范圍內(nèi)連續(xù)變化(見圖5a),滿足設計要求。同時,整個過程弧形架轉(zhuǎn)動84°,即θ1N=84°。 電機位置由尺寸l5、l6確定,滿足式(6)~式(8)所描述的限定條件。電機回縮狀態(tài)下的長度為8.25 cm,完全伸出時的長度為11.25 cm。實際制作的機械構(gòu)件尺寸不可能過大,考慮可穿戴性及美觀性,在此限定l5<14 cm,l6<5 cm。由于f為定值,為1 N,則可得不同l5與l6組合下電機輸出平均扭矩(見圖6a)及可推動弧形架旋轉(zhuǎn)的角度(見圖6b),其中值為0的區(qū)域表示此點對應的l5、l6尺寸與電機尺寸l7無法構(gòu)成三角形。 以圖5所示結(jié)果為例,θ1-θ2應該大于84°,在此設定為90°,另外考慮輸出扭矩最大化,則最優(yōu)點對應的l5、l6分被為2.9、8.4 cm,此時電機可推動弧形架旋轉(zhuǎn)90.59°。 從上述分析可知,前端機械構(gòu)件的尺寸必須與手指長度匹配才能夠使手指有足夠的關(guān)節(jié)活動范圍。為每位患者定制一套機械構(gòu)件顯然是不現(xiàn)實的,本文所提的結(jié)構(gòu)方案僅需通過調(diào)整弧形架的長度,便可適應手指長度的變化。由圖7可見,當長度l1、l2增加,其他參數(shù)h1,h2及l(fā)4保持不變時,通過簡單增加弧形架長度即可重新獲得所需的關(guān)節(jié)活動范圍。弧形架上設置有通孔(圖1中H點處),可用于調(diào)節(jié)弧形架長度。 (a)δ隨α的變化曲線 (b)β隨α的變化曲線 (c)γ隨α的變化曲線圖5 屈曲過程各角度隨弧形架轉(zhuǎn)動角度α的變化曲線 (a)電機平均輸出扭矩與l5、l6關(guān)系圖 (b)弧形架可轉(zhuǎn)動角度與l5、l6關(guān)系圖圖6 機械構(gòu)件后端計算結(jié)果 圖7 不同手指長度在最佳弧形架長度下的手指空間狀態(tài)圖 2.2 機構(gòu)運動仿真與樣機佩戴測試 為進一步確定各機械構(gòu)件尺寸,利用Pro/E進行運動仿真。依據(jù)人手的解剖學結(jié)構(gòu)建立單根手指的仿真模型,根據(jù)Matlab計算結(jié)果設定關(guān)鍵部件尺寸,建立零件的三維模型,然后通過裝配模塊完成各零件的組裝。通過建立運動分析文件,考察手指關(guān)節(jié)活動范圍是否滿足要求,并通過機構(gòu)的動態(tài)干涉檢查,對零件尺寸外形進行修改。不失一般性地限定角度β與γ的運動速度比為3∶4,則一次運動仿真下δ、β及γ的變化曲線如圖8所示。依據(jù)δ的變化規(guī)律可確定弧形架上限位銷的位置。 (a)δ變化曲線 (b)β變化曲線 (c)γ變化曲線圖8 機構(gòu)運動仿真結(jié)果 本文所設計的康復訓練機器人實物佩戴效果圖如圖9所示。選取6名在校研究生(其中包含兩名女性)進行佩戴運動測試,測得示指可屈曲伸展的最大范圍如表1所示。由測試結(jié)果可得,每位受試者的示指長度雖然不同,但掌指關(guān)節(jié)及近端指關(guān)節(jié)均可達到所設計的關(guān)節(jié)活動范圍。 圖9 實物佩戴效果圖 由于欠驅(qū)動式機器人通常含有可自由轉(zhuǎn)動的關(guān)節(jié),且本身的運動具有不確定性,因此將其作為肢體康復訓練裝置用于肢體關(guān)節(jié)運動時,需要對機械機構(gòu)與肢體共同構(gòu)成的系統(tǒng)進行運動學分析,以便確定肢體活動能否滿足訓練要求[8]。本文以終端牽拉式手指康復訓練裝置為例,分析了機械機構(gòu),對手指運動學模型空間狀態(tài)進行了結(jié)構(gòu)的優(yōu)化。仿真及樣機佩戴測試表明:所用的結(jié)構(gòu)優(yōu)化方法能夠有效提高訓練裝置帶動手指關(guān)節(jié)活動的范圍,特別是對于控制輸入量有限的情況(例如直線電機行程有限),能夠通過計算分析得到最佳機械尺寸以滿足訓練需求。本文所提結(jié)構(gòu)優(yōu)化設計方法對于終端牽拉式欠驅(qū)動肢體康復訓練機器人的設計具有一定的參考價值。相比于全驅(qū)動式結(jié)構(gòu),患者在佩戴欠驅(qū)動式康復訓練裝置后,肢體關(guān)節(jié)仍然能夠在一定范圍內(nèi)自由活動,其優(yōu)劣性以及實際康復訓練效果將是下一步研究的重點。 表1 佩戴測試結(jié)果 [1] 李會軍, 宋愛國. 上肢康復訓練機器人的研究進展及前景 [J]. 機器人技術(shù)與應用, 2006, 4: 32-36. LI Huijun, SONG Aiguo. The research progress of upper limb rehabilitation training robot and prospects [J]. Robot Technique and Application, 2006, 4: 32-36. [2] CHANG W H, KIM Y H. Robot-assisted therapy in stroke rehabilitation [J]. Journal of Stroke, 2013, 15(3): 174-181. [3] GLATZ A H, MADLE R, SATTLER J. Robot [J]. Ergotherapie, 2013, 4: 25-29. [4] IQBAL J, KHAN H, TSAGARAKIS N G, et al. A novel exoskeleton robotic system for hand rehabilitation-conceptualization to prototyping [J]. Biocybernetics and Biomedical Engineering, 2014: 34: 79-89. [5] IQBAL J, TSAGARAKIS N G, CALDWELL D G. A multi-dof robotic exoskeleton interface for hand motion assistance [C]∥33rd Annual International Conference of the IEEE. Piscataway, NJ, USA: IEEE, 2011: 1575-1578. [6] 勵建安, 畢勝, 黃曉琳. 物理醫(yī)學與康復醫(yī)學理論與實踐 [M]. 5版. 北京: 人民衛(wèi)生出版社, 2013. [7] 馬培謹, 齊艷, 金巖. 持續(xù)被動運動在肢體關(guān)節(jié)功能恢復中的應用 [J]. 中國臨床康復, 2005, 9(30): 190-191. MA Peijin, QI Yan, JIN Yan. Application of continuous passive exercise in the functional recovery of limb joints [J]. Chinese Journal of Clinical Rehabilitation, 2005, 9(30): 190-191. [8] IQBAL J, TSAGARAKIS N G, FIORILLA A E, et al. A portable rehabilitation device for the hand [C]∥ 32nd Annual International Conference of the IEEE. Piscataway, NJ, USA: IEEE, 2010: 3694-3697. [本刊相關(guān)文獻鏈接] 鄭楊,王剛,徐進,等.大腦皮層-肌肉交互作用與注意力關(guān)系的實驗研究.2014,48(6):134-138.[doi:10.7652/xjtuxb2014 06023] 文鍵,楊輝著,王斯民,等.旋梯式螺旋折流板換熱器優(yōu)化結(jié)構(gòu)的數(shù)值模擬.2014,48(11):8-14.[doi:10.7652/xjtuxb 201411002] 袁通,劉志鏡,劉慧,等.多核處理器中基于MapReduce的哈希劃分優(yōu)化.2014,48(11):97-102.[doi:10.7652/xjtuxb 201411017] 韓賓,文燦,于渤,等.泡沫填充波紋夾芯梁的面內(nèi)壓縮破壞模式分析.2014,48(11):37-43.[doi:10.7652/xjtuxb2014110 07] 田寅,賈利民,董宏輝,等.列車通信網(wǎng)絡設計問題中的雙層規(guī)劃模型.2014,48(4):133-138.[doi:10.7652/xjtuxb2014 04023] 張鴻,張牡丹,張杰,等.用于植入式醫(yī)療裝置的逐次逼近式模數(shù)轉(zhuǎn)換器.2015,49(2):43-48.[doi:10.7652/xjtuxb2015 02008] 梁法春,王棟,楊桂云,等.氣液兩相流臨界分配特性及相分離控制.2015,49(1):53-58.[doi:10.7652/xjtuxb201501009] 丁正龍,徐月同,傅建中.深孔內(nèi)徑的在線精密測量原理及系統(tǒng).2015,49(1):65-71.[doi:10.7652/xjtuxb201501011] (編輯 趙煒 杜秀杰) A Structure Optimal Design of Training Devices for the Under-Actuated Hand Rehabilitation ZHENG Yang1,2,CHEN Lei1,2,WANG Gang1,2,LIU Xinrong1,2,DONG Xiaotong1,2,WANG Jue1,2 (1.The Key Laboratory of Biomedical Information Engineering of Ministry of Education, Xi’an Jiaotong University, Xi’an 710049, China; 2.National Engineering Research Center of Health Care and Medical Devices, Xi’an Jiaotong University, Xi’an 710049, China) A method for the optimization of mechanical structure of the under-actuated hand rehabilitation training system is proposed to expand the motion range of its finger joints and to satisfy training requirements and it is based on analyzing spatial states of kinematic models. Simplified spatial models for the mechanical components and fingers are established. All possible spatial vectors under some mechanical size and finger length are calculated to form a set of spatial states by regarding the rotation angles of key mechanical components and finger joints as the elements of spatial vectors. Then, the optimal mechanical sizes are determined by investigating different state sets to make the motion range of finger joints meet the needs of clinical training. A software is used to build a 3D entity model for kinematic analysis. The results from simulation and prototype wear tests show that the proposed device can assist fingers to finish flexion and extension within required motion ranges and is capable of adapting the changes in finger length. It can be concluded that the proposed method is helpful for the structure optimal design of under-actuated limb rehabilitation training devices. finger rehabilitation; under-actuated; structure optimal design; end-effector type 2014-07-08。 作者簡介:鄭楊(1987—),男,博士生;王玨(通信作者),女,教授,博士生導師。 基金項目:國家科技支撐計劃資助項目(2012BAI33B01);江蘇省科技支撐計劃-社會發(fā)展項目(BE2011689)。 10.7652/xjtuxb201503023 R318.04 A 0253-987X(2015)03-0151-062 數(shù)值計算與仿真測試


3 結(jié) 論
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09