電動汽車用永磁同步電機滑模預測控制
2015-03-12 09:22:42符曉玲劉旭東
微特電機 2015年11期
符曉玲,劉旭東
(1.昌吉學院,昌吉831100;2.山東大學,濟南250061)
0 引 言
永磁同步電動機(以下簡稱PMSM)具有功率密度大,效率高、可靠性好等特點,在電動汽車應用領域存在巨大的發展潛力[1]。根據永磁體的放置方式不同,PMSM 分為內置式PMSM 和表面式PMSM。表面式PMSM 制造工藝簡單、成本低,內置式PMSM因具有凸極效應而產生磁阻轉矩,使其具有更寬的調速范圍,目前應用于電動汽車驅動的PMSM 以內置式為主[2]。在基速以下,常用的電動汽車用PMSM 矢量控制方法包括最大轉矩電流比控制和id=0控制。最大轉矩電流比方法能保證系統電流的最大利用,但存在d 軸電流和q 軸電流的耦合,運行速度較慢,降低了系統的動態性能[3]。因此,本文采用id=0 的控制方法,只需要控制q 軸電流便可實現電機的控制,該方法由于沒有直軸分量,損失了磁阻轉矩,但是當電機運行于中低速范圍時,仍能保持較高的運行效率。
另外,電動汽車是一類異常復雜且難以控制的系統,其行駛工況復雜多變、隨機性強,而且對動、穩態性能指標要求極為苛刻,再加上PMSM 本身的多變量、強耦合、非線性等,傳統的PI 的矢量控制方法難以滿足電動汽車驅動系統的性能要求。因此,研究PMSM 的高性能轉速和轉矩控制具有重大的現實意義。近年來,一些先進的控制策略已逐步用在了PMSM 的轉速和電流控制中,如反饋線性化[4]、滑模控制[5]、自適應控制[6]、無源性控制[7]、智能控制[8]、反步控制[9]、預測控制[10]等被應用到PMSM控制系統中,并取得了大量的研究成果。
模型預測控制作為一種新的控制方法,利用系統的輸入輸出數據預測未來時刻的輸出,再通過優化含有輸出變量和參考軌跡的目標函數,得到預測控制律,具有控制效果好、魯棒性強、對模型精確性要求不高等優化,得到越來越多的研究人員的重視。目前已應用在機器人、電機、功率變換器等控制領域[11-13]。同樣,模型預測控制方法在PMSM 控制中也證明了其有效性,文獻[14]中詳細介紹了三種PMSM 電流預測控制方法并做了比較;文獻[15]提出了基于自動微分理論的PMSM 電流預測控制,將PMSM 的模型按泰勒級數展開,通過計算泰勒級數靈敏度,實現模型預測控制;文獻[16 -17]提出了基于無差拍算法的電流環預測控制方法,文獻[17]中并引入了魯棒電流控制算法,提高系統的抗擾動性能。目前在PMSM 的預測控制方法中,大多是針對電流環的預測控制,或者是將電流環和轉速環統一建模,采用非級聯結構的預測控制,而針對轉速環的預測控制方法較少,文獻[18]中在轉速環和電流環分別采用模型預測控制,并在轉速環中引入了干擾模型,提高了系統抗擾性能;文獻[19]提出了基于預測函數方法的PMSM 轉速環控制,但是為了提高抗擾動性能,引入擴展狀態觀測器來觀測擾動量,并采用前饋補償的方法設計了補償控制器。
本文在PMSM 模型預測控制中,結合滑模控制的強魯棒性,提出了一種新型的基于滑模預測控制[20-21]的PMSM 轉速跟蹤控制方法。目前該方法已應用在三相變換器、伺服系統、高速飛行器等領域[22-24]。通過建立滑模預測模型、反饋校正、滾動優化等,得到滑模預測控制器,即最終的q 軸電流參考值。最后,通過仿真證明了該方法的有效性,結果表明,通過與傳統的PI 控制方法相比較,該方法具有更好的轉速跟蹤性能和抗擾動性,適用于電動汽車驅動系統等負載轉矩多變的情況。
1 PMSM 的滑模預測模型
PMSM 的矢量控制通常采用轉速環和電流環級聯的控制結構,本文主要研究基于滑模預測控制方法的轉速環控制問題。
1.1 PMSM 的數學模型
為了建立滑模預測模型,首先需建立PMSM 的數學模型。按轉子磁場定向理論,PMSM 在dq 同步旋轉坐標系下的數學模型可表示:

式中:Ld和Lq為d-q 同步旋轉坐標系下的定子電感;id,iq,ud,uq分別為d-q 坐標系下的定子電流和電壓;Rs為定子電阻;p 為極對數;ω 為轉子機械角速度;Φ 為永磁體產生的磁鏈;J 為轉動慣量;T 為電磁轉矩;TL為負載轉矩;b 為摩擦系數。
對于PMSM,采用id=0 的控制方法,由式(1)的第三式和式(2)得:

將負載轉矩作為擾動變量,采用零階保持器方法,將式(3)離散化得:

令e(k)=ω(k)-ωd(k),其中,ωd(k)為給定轉速:

1.2 PMSM 的滑模預測模型
根據滑模控制理論,控制器的設計包括:(1)尋找一個具有期望性能的滑模面;(2)構造合適的控制律,使得系統誤差狀態能夠到達滑模面,并在之后保持在滑模面上,首先定義包含電機轉速誤差的切換函數:



令u(k)=iq(k),由式(6)和式(8)得:

由此可得經p 步預測后的模型:
同理可得在k-p 時刻預測k 時刻的模型:
2 PMSM 的滑模預測控制器設計
基于上一節中建立的PMSM 滑模預測模型,下面將根據預測控制理論,通過反饋校正、滾動優化、以及設計的參考軌跡,求得最終的電機轉速跟蹤控制器。
2.1 反饋校正
考慮到實際電機模型中存在的非線性,參數時變以及外部干擾等,使得預測模型與實際的電機輸出有一定的誤差,利用s(k)與smp(k|k -p)的差值對k+p 時刻的滑模預測輸出值sm(k +p)進行反饋校正,經過校正后的滑模預測模型輸出:

式中:ξp為反饋校正系數。
2.2 參考軌跡
通過設計參考軌跡,使得系統狀態沿著期望的軌跡達到設定的轉速值,取參考軌跡:

式中:0 <β <1,sd為切換函數期望值,sd=0,從而滑模預測參考軌跡:

2.3 滾動優化
為了實現電機轉速的快速跟蹤控制,定義包括參考軌跡與預測模型誤差,以及轉速環控制量u(k)的性能指標函數:

式中:N 和M 分別為預測時域和控制時域,本文中,取N=6,M=1;λj為權重系數。根據文獻[20],通過對性能指標Ja最小化,可求得PMSM 轉速環的滑模預測控制器:

其中:
3 仿真結果
為了驗證本文設計的PMSM 滑模預測控制器的有效性,在MATLAB 下建立PMSM 控制系統的仿真模型,PMSM 的參數如表1 所示。
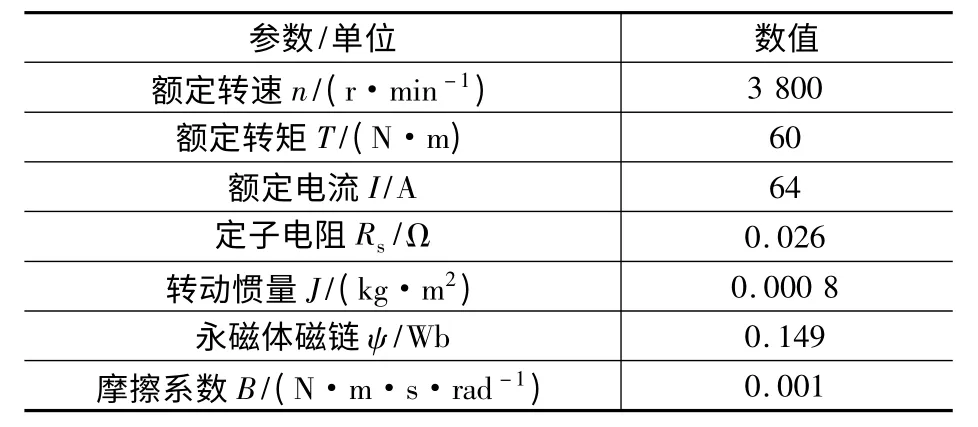
表1 PMSM 的參數
在滑模預測控制中,取采樣時間Ts=0.2 ms,預測時間T=1 ms,λ1=0.95,α=0.95,A =0.998 8,B=0.744 5。圖1 為200 rad/s,負載轉矩20 N·m,取不同的β 值時的轉速響應曲線。從圖1 中看出,β值越小,電機轉速響應越快,但過快的響應速度會使轉速產生超調。
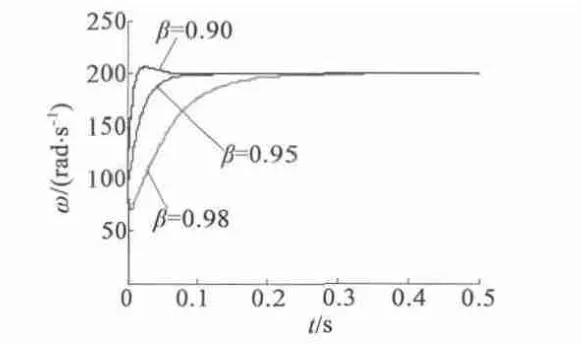
圖1 不同β 值時的轉速響應曲線
為了驗證本文提出的滑模預測控制方法的有效性,將其與傳統的PI 矢量控制方法相比較,兩種方法取同樣的限幅值,電流環采用相同的PI 參數,兩種方法都達到較好的控制性能,在滑模預測控制中取β=0.95。圖2 為給定電機轉速為200 rad/s,負載轉矩為20 N·m,兩種方法對應的轉速響應曲線。

圖3 為滑模預測控制方法對應的dq 軸電流響應曲線。從圖2 中可以看出,采用滑模預測控制方法超調量小,且能夠更快地達到期望轉速。
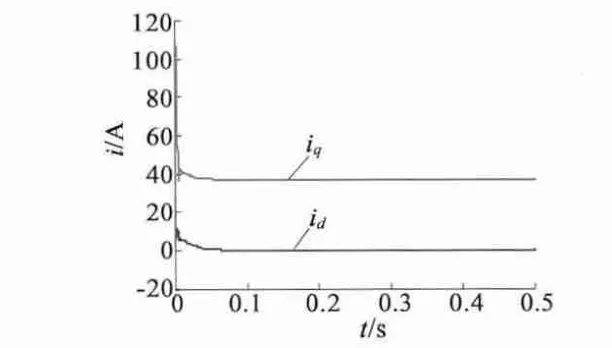
圖3 電機起動時dq 軸響應曲線
為了驗證該方法的魯棒性,電機穩定運行在200 rad/s,在t=0.5 s 時,負載轉矩由20 N·m 突變為25 N·m,圖4 為電機負載轉矩突變時,PI 控制和滑模預測控制兩種方法的轉速變化曲線,圖5 為采用滑模預測控制方法對應的dq 軸電流變化曲線。

由圖5 中可以看出,電機負載轉矩突然增大時,對應的dq 軸電流立即增大。與此同時,轉速出現較小的波動,但是與PI 控制方法相比,采用滑模預測控制方法,轉速恢復時間更快,能夠快速地消除負載變化的影響,具有更強的抗負載擾動性能。而采用PI 控制時,轉速恢復慢,不利于電動汽車等負載轉矩頻繁變化且對動態性能要求高的場合。
圖2 ~圖5 的仿真結果表明,相比與傳統的PI控制方法,本文提出的PMSM 滑模預測控制方法具有更好的轉速響應性能和抗擾動性能。
4 結 語
本文提出了一種基于滑模預測控制方法的電動汽車用PMSM 的轉速跟蹤控制方法,用于PMSM 的轉速環控制,通過建立基于速度誤差的滑模預測模型,然后根據預測控制理論,經過反饋校正和滾動優化,求得電機轉速控制器。從仿真結果可以看出,本文設計的滑模預測控制器能夠快速地跟蹤電機期望轉速,且具有較強的魯棒性能,可有效減小電機負載變化對電機性能的影響,進而有助于提高電動汽車駕乘的舒適性和動態響應性能。
[1] EHSANI M,GAO Y M,GAY S E,et al.現代電動汽車、混合動力電動汽車和燃料電池車——基本原理、理論和設計[M].2 版.倪光正,倪培宏,熊素銘,譯.北京:機械工業出版社,2012.
[2] 陳丹亞,賈要勤,楊仲慶.電動車驅動用IPM 永磁同步電動機控制方法綜述[J].微特電機,2010,38(2):44 -48.
[3] 電動車用PMSM 的快速轉矩電流響應控制方法[J]. 微特電機,2015,43(1):54 -57.
[4] GRCAR B,CAFUTA P,ZNIDARIC M. Nonlinear control of synchronous servo drive[J]. IEEE Trans. on Control Systems Technology,1996,4(2):177 -184.
[5] 張碧陶,皮佑國.基于分數階滑模控制技術的永磁同步電機控制[J]. 控制理論與應用,2012,29(9):1193 -1197.
[6] LI S H,LIU Z G. Adaptive speed control for permanent -magnet synchronous motor system with variations of load inertia[J].IEEE Trans. on Industrial Electronics,2009,56(8):3050 -3059.
[7] PETROVIC V,ORTEGA R,STANKOVIC A M. Interconnection and damping assignment approach to control of PM synchronous motors[J]. IEEE Trans. on Control Systems Technology,2001,9(6):811 -820.
[8] YANG Y,VILATHGAMUWA D M,RAHMAN M A. Implementation of an artificial-neural-network-based real -time adaptive controller for an interior penmanent magnet motor drive[J]. IEEE Trans. on Energy Conversion,2003,39(1):96 -104.
[9] YU J P,GAO J W.Adaptive fuzzy tracking control for a permanent magnet synchronous motor via backstepping approach[J]. Mathematical Problems in engineering,2010,17(4):242 -256.
[10] BLOLGNANI S,BOLOGNANI S,PERETTI L.Design and Implementation of Model Predictive Control for Electrical Motor Drives[J].IEEE Trans. on Industrial Electronics,2009,56(6):1925-1936.
[11] SUNG J Y,YOON H C,JIN B P. Generalized predictive control based on self - recurrent wavelet neural network for stable path tracking of mobile robots:adaptive learning rates approach[J].IEEE Trans. on Circuits and Systems,2006,53(6):1381 -1394.
[12] JAROSLAW G,HAITHAM A R.Speed sensorless induction motor drive with predictive current controller[J]. IEEE Trans. on Industrial Electronics,2013,60(2):609 -709.
[13] 楊勇,阮毅,葉斌英.三相并網逆變器無差拍電流預測控制方法[J].中國電機工程學報,2009,29(33):40 -46.
[14] MOREL F,LIN -SHI X F,RETIF J M. A comparative study of predictive current control schemes for a permanent-magnet synchronous machine drive[J].IEEE Trans. on Industrial Electronics,2009,56(7):2715 -2728.
[15] 高麗媛,盧達,趙光宙.應該自動微分的永磁同步電機預測控制[J]. 電機與控制學報,2012,16(10):38 -43.
[16] 王宏佳,徐殿國,楊明.永磁同步電機改進不差拍電流預測控制[J]. 電工技術學報,2011,26(6):39 -45.
[17] 牛里,楊明,劉可述. 永磁同步電機電流預測控制算法[J].中國電機工程學報,2012,32(6):131 -137.
[18] CHAI S,WANG L P,ROGERS E.A cascade MPC control structure for a PMSM with speed ripple minimization[J].IEEE Trans.on Industrial Electronics,2013,60(8):2978 -2987.
[19] LIU H X,LI S H.Speed control for PMSM servo system using predictive functional control and extended state observer[J]. IEEE Trans. on Industrial Electronics,2012,59(2):1171 -1183.
[20] XIAO L F,SU H Y,CHU J. Sliding mode prediction tracking control design for uncertain systems[J].Asian Journal of Control,2007,9(3):317 -325.
[21] HOUDA B M,SAID N A. Discrete predictive sliding mode control of uncertain systems[J]. International Multi -Conference on Systems,Signals and Devices,2012:1 -6.
[22] CURKOVIC M,JEZERNIK K,HORVAT R. FPGA -based predictive sliding mode controller of a three - phase inverter[J].IEEE Trans. on Industrial Electronics,2013,60(2):3050 -3059.
[23] 尹洋,夏立,宋立忠.網絡直流伺服電機滑模預測控制[J].電力自動化設備,2011,31(6):65 -69.
[24] 高海燕,蔡遠利.高超聲速飛行器的滑模預測控制方法[J].西安交通大學學報,2014,48(1):67 -72.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56