基于電流滯環的實現動能回收的無刷直流電機控制方法
2015-03-12 09:24:58汪磊,胡楊,丁偉
微特電機 2015年11期
汪 磊,胡 楊,丁 偉
(1.合肥工業大學,合肥230009;2.臺州市金宇機電有限公司,臺州318020)
0 引 言
無刷直流電機是指具有串勵直流電動機起動特性和并勵直流電動機調速特性的梯形波/方波直流電動機,其基本結構由電機本體、功率驅動電路及位置傳感器三者組成[1]。無刷直流電機具有結構簡單、出力大和效率高等特點[2]。
無刷直流電機的控制策略大多采用電壓、電流雙閉環PI 調節器[3-5],對于電機電流的控制是通過PWM 占空比調節電機的端電壓來實現的。但在實際中,電機轉子磁場并不是理想的梯形波,使得在傳統改變PWM 波占空比的控制策略下的電流波形近似于三角形,對控制器的容量要求較高,同時控制器以及電機的效率較低。傳統的控制系統存在起動電流過大、控制器的容量較大、起動停車時間較長等問題。在制動方式的選擇上,大多數采用能耗制動,使得在制動過程中產生的能量消耗在電機的繞組上。而能量回饋制動則是將制動過程中的動能回饋到直流電源,從而延長直流電源的工作時間。參考文獻[6 -7]研究了無刷直流電機回饋制動的控制方法,并進行了實驗研究。隨著無刷直流電機的應用范圍越來越廣泛,對其實現回饋制動的研究也越來越受到重視。
本文介紹了一種電流內環采用滯環控制的無刷直流電機控制方法。這種控制方式具有以下優勢:1)起動時能限流起動,減小由于起動電流過大對控制器及電機造成的沖擊;2)縮短了起動、停車時間,起動時采用大電流起動,停車時同樣也采用大電流停車;這樣實現了快速的起動、停車;3)停車采用的是能量回饋制動方式,將電機負載慣量儲存的動能回饋到蓄電池;4)采用內環電流滯環后,使得電機相電流能夠快速的跟隨電流給定值,這樣快速地控制可以得到平穩的電流波形,電流平穩,縮小控制器的容量,提高電機的效率。
1 數學模型
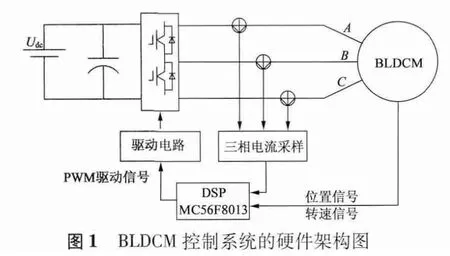
圖1 是無刷直流電機的控制系統的硬件架構圖,包括主電路和控制電路兩部分。
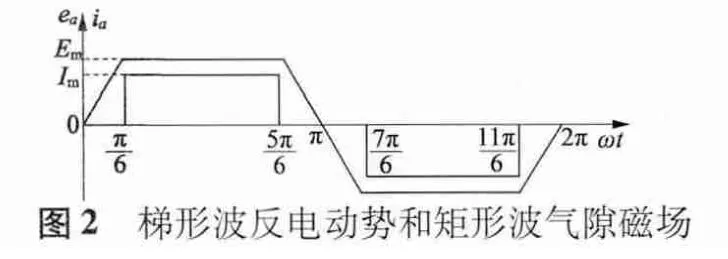
首先對無刷直流電動機作假定,轉子磁通不飽和,忽略電機的附加損耗,即磁滯損耗和渦流損耗。理想狀態時,反電動勢和氣隙磁場的波形如圖2 所示。
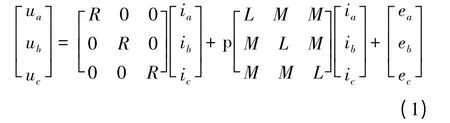
一般認為電機繞組的電阻R 是常值,每相繞組的自感L 和相與相之間的互感M 也是定值。在此情況下,無刷直流電動機的三相繞組電壓方程:
2 換流模式分析
采用兩相導通星形三相六狀態控制模式,每一時刻都有兩相繞組通電。以A 上B 下導通為例進行環流模式分析,A 相橋臂處于調制狀態,B 相下管處于常通狀態,C 相上下管全部關斷。
圖3(a)為電動狀態下A 上B 下導通狀態的環流模式,電動勢平衡方程:

對應圖4 中t0~t1時段,S0 導通,電流增大。
圖3(b)為電動狀態下A 下B 下導通狀態的環流模式,電動勢平衡方程:

對應圖4 中t1~t2時段,D1 導通,電流減小。
圖5 為電機制動狀態下采用滯環控制的瞬時電流波形,圖6 為電動機制動狀態下的電流換相模式。t0時刻,ia達到滯環的下限值,此時電流方向與電動狀態時相反,S0 不能導通,電流經D0 流向電源正極,ia逐漸增大。當ia= -iref時,HBC 仍輸出高電平,D0 持續導通,ia繼續增大,直到t1時刻,ia= -(iref-ih/2),滯環輸出發生翻轉,D0 關斷,經延時后S1 導通,ia逐漸減小。直到t2時刻,ia= -(iref+ih/2),滯環輸出再次發生翻轉,D0 再次導通。這樣D0與S1 交替工作,D3 處于常通狀態,使輸出電流ia與給定值iref的差值保持在±ih/2 范圍內。

圖6 的拓撲是一個Boost 電路,通過Boost 升壓,電機對電源進行充電,實現動能回收。
3 電流滯環環寬與開關頻率的關系
以電動狀態下滯環控制的瞬時電流波形為例,分析滯環環寬和開關頻率之間的關系。首先假定忽略開關死區時間,認為同一橋臂上下功率管的導通和關斷是瞬時的、互補工作的[4]。由圖3 及式(2)可以得到:

由圖3 及式(3)可以得到:




考慮到功率管允許的開關頻率較高,可以假定在開關頻率較高時忽略電阻的影響,繞組電感產生的作用遠大于電阻的,則有:

由式(8)可以得到開關頻率f 與滯環環寬ih的關系式:

由式(9)可以看出,開關頻率與滯環環寬成反比。
4 控制策略
圖7 是內環采用電流滯環控制的雙閉環結構圖,KT為電機轉矩系數;J 為轉動慣量。
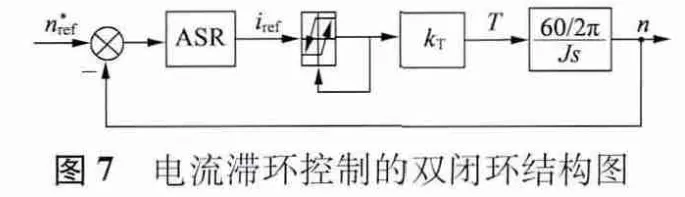
圖7 中,轉速外環調節器ASR 應具有良好的抗干擾能力,則按照典型Ⅱ系統設計,選擇PI 調節器,外環控制規律:

式中:Knp,Kni分別為轉速外環比例、積分系數。
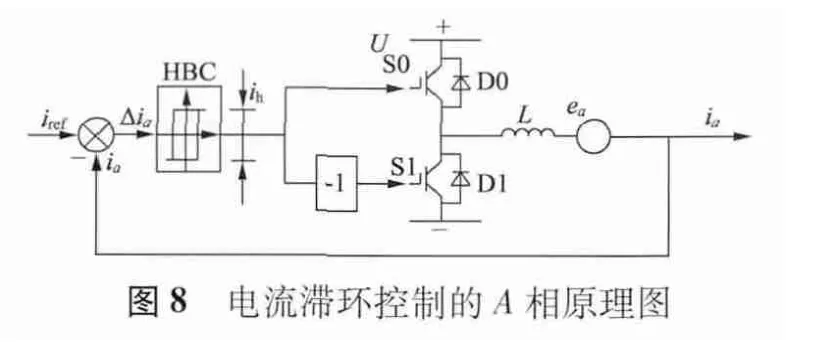
對于電流內環,采用滯環控制。將實際轉速與給定轉速的差值送入轉速調節器ASR,得到電流的給定值iref,通過對電流進行比較,系統直接輸出高電平或低電平,使電流迅速跟蹤給定電流。電流滯環控制的A 相原理圖如圖8 所示。
5 實驗結果與分析
實驗中用到的控制芯片是Freescale 的DSP MC56F8013;電機是外轉子的無刷直流電機,電機參數如表1 所示。

表1 電機參數
圖9 是無刷直流電機空載起動及停車的波形。從圖9 中可以看出,t0時刻電機起動,直流側電壓被拉低,電機以較大電流起動,t1時電流穩定,起動完成;t1~t2是穩定運行時間;t2~t3是電機停車過程,電機以最大電流制動,直流母線上會流過一個反向的負電流,同時,直流側電壓會有一個升壓過程,制動時直流側蓄電池會進行充電。
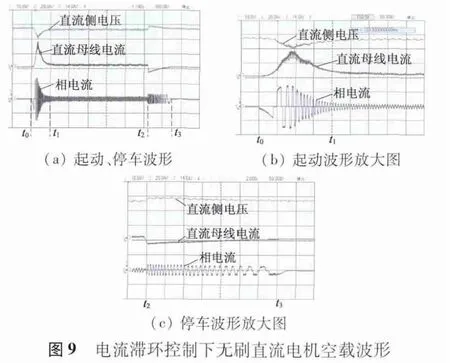
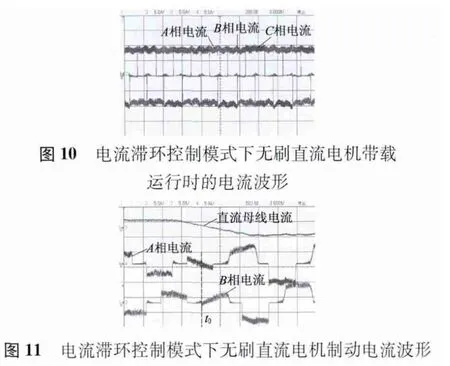
圖10 是無刷直流電機在電流滯環控制模式下帶負載運行時的電流波形。
圖11 為電流滯環控制模式下,無刷直流電機制動過程電流波形。從圖11 中可以看出,在A 相功率管導通區間內,A相電流在t0時刻由正值減小到了負值;B 相電流應在t0時刻變為負值,但此時B 相產生了正電流;直流母線電流反向增大。此時,無刷直流電機處于制動狀態,電機的動能轉化為電能,向蓄電池充電,實現動能回收。
6 結 語
本文將滯環控制應用于電機調速系統的內環控制上,結合轉速外環的PI 調節控制,構成雙閉環調速系統,得出以下結論:
(1)在電機起動過程中,能保持較大電流快速啟動;在電機制動過程中,電機能保持較大電流快速制動并且實現了動能回饋;
(2)整個實驗過程中,采用內環電流滯環后,使得電機相電流能夠快速的跟隨電流給定值,得到平穩的電流波形。
[1] 夏長亮. 無刷直流電機控制系統[M]. 北京:科學出版社,2009.
[2] 夏長亮,方宏偉.永磁無刷直流電機及其控制[J].電工技術學報,2012,27(3):26 -34.
[3] 王孝武. 現代控制理論基礎[M]. 北京:機械工業出版社,1998.
[4] 陳伯時.電力拖動自動控制系統[M].北京:機械工業出版社,2003.
[5] 王成元,夏加寬,孫宜標. 現代電機控制技術[M]. 北京:機械工業出版社,2008.
[6] 黃斐梨,王耀明,姜新建,等.電動汽車永磁無刷直流電機驅動系統低速量回饋制動的研究[J]. 電工技術學報,1995,9(3):28 -36.
[7] 張毅,楊林,李立明,等.電動汽車無刷直流電動機的回饋控制[J].上海交通大學學報,2005,39(9):52 -55.
[8] 孫佃升,賈榮叢,白連平.半橋調制下無刷直流電機回饋制動的研究[J].電力電子技術,2008,42(10):22 -24.