基于線性霍爾元件的準無位置傳感器伺服系統設計
2015-03-12 09:23:22謝宏亮
微特電機 2015年5期
關鍵詞:信號
謝宏亮
(湘潭大學,湘潭411100)
0 引 言
永磁同步電機因其效率高、能耗低、體積小、調速范圍寬等優點在工控行業越來越得到廣泛的應用。要實現電機的高精度全閉環控制,必需準確獲取電機轉子的位置、速度信息。
目前應用的位置傳感器主要是光電編碼器,但機械沖擊等因素引起的振動易使碼盤破碎;并且由于成本因素,一般使用增量式編碼器,容易產生讀數累計誤差;而絕對式編碼器價格昂貴、且體積大,增加了機械結構的復雜度和成本[1],并且和控制器之間的數據通信容易產生誤差。針對上述問題,許多學者提出了應用反電動勢[2]、狀態觀測器[3-4]、神經網絡[5]、或卡爾曼濾波器[6]的無位置傳感器控制策略,但是計算模型復雜以及運算量大、耗時長,直接影響到系統控制周期和控制效果,需要高性能處理器,并且估算效果嚴重依賴于電機參數的準確性[7](電機長時間運行下的發熱將導致參數發生非線性變化),低速下控制性能差,尤其是系統剛上電情況下很難獲取電機轉子初始位置。因此這些控制方式要真正實現在工農業生產中大規模應用還需一定時間[8]。
為了降低成本,文獻[9 -12]提出了一種采用單個鎖定型(開關)霍爾進行角度測量的方法,取得了一定的效果,但是存在低速和電機速度變化較快時性能不高的缺點;同時從開關霍爾工作特性曲線可以看出,開關霍爾信號輸出存在磁滯現象,使得測量算法存在誤差,精度不高。線性霍爾具有體積小、價格低等優點[13],文獻[14]提出了一種基于線性霍爾元件的新型絕對式多極磁電軸角編碼器設計方案,取得了較好的效果。本文基于文獻[14]提出一種應用線性霍爾元件的準無位置傳感器伺服控制方案,采用兩個環形磁鋼固定在電機非負載端軸上作為粗精碼道實現角度細分,利用線性霍爾元件來得到電機轉子位置信息。霍爾元件的輸出直接單片機的模擬輸入口,經模數轉換成數字信號。預先用一高精度的增量式光電編碼器進行校準,得到霍爾信號和標準角度的關系,將數據存儲到單片機的只讀存儲器(ROM)中。實際工作下,通過查表得到電機轉子位置來實現閉環控制,計算量非常小,基本不占用控制時間。在保證控制效果前提下,極大降低了產品成本,提高了產品可靠性。
1 準無位置傳感器控制器設計
控制系統主要由電源部分、永磁同步電動機、霍爾傳感模塊、主控電路、功率驅動以及外圍接口電路構成,如圖1 所示。

圖1 控制系統硬件組成
處理器(MCU)采用某型號32 位處理器,霍爾傳感模塊由6 個線性霍爾元件(3 個貼片封裝,3 個插件封裝)和固定支架組成。對固定在電機軸上兩個磁環磁場進行感應,霍爾輸出直接單片機的模擬輸入口,無需放大電路,有利于降低系統成本。其中貼片霍爾輸出接ADC0 和ADC1,插件霍爾輸出接ADC2。系統的控制框圖如圖2 所示,根據霍爾信號通過位置求解算法實時得到電機轉子位置,作為機械環的反饋,經過PI 調節器,得到電流環指令,然后根據電機三相實際反饋電流得到電流指令偏差,通過PI 調節器得到電壓指令信號,采用PWM 調制實現對IPM 的有效控制,從而實現對電機速度、轉矩的有效控制。

圖2 系統控制框圖
2 準無位置傳感器位置檢測方案設計
霍爾感應模塊由兩個磁環和霍爾元件組成,磁環一為單對極磁鋼,定義為粗碼道;磁環二為6 對極磁鋼,定義為精碼道。磁環固定在電機軸上,相隔一定距離以消除兩個碼道之間的磁耦合。
霍爾元件的輸出信號包含了轉子位置信息,傳統方法是采用求反正切方法得到,但計算比較復雜且精度不高。本文利用校準查表的方法得到角度θ,預先用高分辨率的增量式光電編碼器進行校準,得到霍爾輸出信號和標準角度的對應關系,然后通過單片機的自編程技術無需拆卸硬件將數據存儲到單片機的ROM 中。控制過程中,根據霍爾信號查表得到電機轉子位置,響應速度較快。
2.1 粗碼道設計
采用廉價永磁體徑向充磁得到單對極磁鋼環作為粗碼道,磁鋼環固定在電機轉子上,3 個線性插件霍爾H4,H5,H6均勻分布在磁鋼外環,依次相距120°,霍爾與磁鋼之間氣隙為0.75 mm,如圖3(a)所示。磁環可均勻細分為6 個60°子區間如圖3(b)所示。當霍爾元件感應的磁場為“N”,霍爾輸出定義為“0”,反之定義為“1”。因此電機轉子帶動磁鋼環旋轉一周,三個線性霍爾輸出為如圖4 所示的6個狀態,其代表的絕對角度偏移值如表1 所示。偏移值預先存儲在ROM 中,在工作中根據霍爾H4,H5,H6查表得到此時的絕對偏移量。


圖4 霍爾輸出信號狀態轉移圖

表1 霍爾輸出與理論角度映射關系
2.2 精碼道設計
精碼道實現粗碼道中每區域內角度的再細分以提高角度測量分辨率。6 對極精碼道基本結構如圖5 所示,任一“N -S”對應理論角度60°。三個線性貼片霍爾元件H1,H2,H3焊接在印刷電路板(PCB)上,其物理安裝角度均勻間隔20°。3 個線性霍爾元件的輸出可用下式描述:

圖5 6 對極精碼道結構示意圖

定義精碼道中任一相鄰“N -S”為一個信號周期,線性霍爾理論輸出波形如圖6 所示。電機轉子旋轉360°,霍爾信號變化6 個信號周期,對應于機械角度360°。

圖6 霍爾理論輸出波形
角度求解算法在信號處理上采用基于校準查表的處理方式。預先用一高分辨率的增量式光電編碼器進行校準。在校準狀態下,光電編碼器通過特定的高同軸度工裝和伺服電機連接,在勻速旋轉過程中通過數據采集和處理工具對光電編碼器的角度脈沖輸出和霍爾信號v1,v2,v3同時進行采樣,數據通過USB 上傳到上位機,采用基于改進移動窗口最小二乘法進行數據處理得到實際物理角度和線性霍爾輸出之間唯一對應關系。利用單片機在線自編程技術無需拆卸硬件而將數據下載到單片機的ROM中。工作過程中根據霍爾信號查表得到轉子在任一“N-S”下相對偏移角度。
現有v1,v2,v3三條信號,需要確定用哪相查表誤差最小精度最高。從三條信號曲線特性我們可以分析出,在[0°,5°]范圍內,v1幅值變化范圍最大,v3次之,v2最小,因此v1具有最好的線性度,適合作為查表基準,其他區間分析類似。在工作狀態下,算法處理流程如圖7 所示,精碼道霍爾輸出信號v1,v2,v3通過運算放大器進行信號放大,進行模數轉換得到數字信號,然后進行信號的低通濾波、溫漂補償等后續處理,查表得到轉子在所處磁極區間內的相對偏移量;同時對絕對碼道霍爾H4,H5,H6的輸出信號進行模數轉換和數據編碼,查表得到轉子所處磁極區間的絕對偏移量,兩者合成得到轉子的絕對角位移。

圖7 角度求解流程
3 實驗分析
準無位置傳感器控制系統結構框圖如圖8 所示。采用三菱智能功率模塊IPM 驅動電機,單片機通過SPI 與外部設備進行通訊來進行速度調節,位置設定等操作,系統參數存儲在EEPROM 中。
霍爾模塊中,精碼道的三個貼片霍爾輸出波形如圖9 所示,粗碼道對應的插件霍爾輸出波形如圖10 所示。將角度通過串口輸出到計算機得到誤差如圖11 所示,結果表明角度分辨率能夠達到15 位。

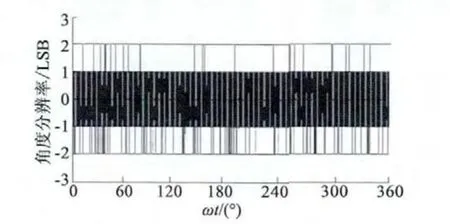
圖11 角度分辨率
電機控制算法采用經典的轉子磁場定向矢量控制策略。在控制程序設計上,主程序周期設置為60 μs,即在波峰和波谷都進入中斷服務程序。在中斷服務程序中先讀取霍爾信號值,通過查表得到當前轉子位置信息,然后進行機械環和電流環的控制,最終得到六路PWM 控制信號驅動功率模塊,軟件運行時序如圖1 2 所示。圖1 3 為系統從0 上升到4 000 r/min 運行一段時間再制動到0 的頻繁起停波形,其中圖13(b)為圖13(a)實線部分的局部放大圖。實驗結果表明整個控制系統工作正常,運行穩定。


圖13 4 000 r/min 電機單相電流波形
4 結 語
本文提出了一種應用線性霍爾元件實現永磁同步電機準無位置傳感器控制策略,設計了一套生產工藝簡單的霍爾信號產生模塊,并且基于MCU 進行了控制器的設計,實現了電機轉子高精度絕對檢測,實時性好,解決了控制系統的成本和性能之間的矛盾。實驗結果表明,系統控制精度高,調速范圍寬,響應速度快,性能可靠,適合于工農業生產中批量應用。
[1] 陸華才,徐月同,楊偉民,等. 無位置傳感器表面式永磁同步直線電機初始位置估計新方法[J].中國電機工程學報,2008,28(15):109 -113.
[2] 張劍,溫旭輝,劉鈞,等. 一種基于DSP 的PMSM 轉子位置和速度估計新方法[J].中國電機工程學報,2006,26(12):144 -148.
[3] 黃志武,桂衛華,年曉紅,等. 一種新型的基于觀測器的無速度傳感器感應電動機定子電阻辨識方案[J]. 電工技術學報,2006,21(12):13 -20.
[4] 高揚,楊明,于泳,等. 基于擾動觀測器的PMSM 交流伺服系統低速控制[J].中國電機工程學報,2005,25(2):125 -129.
[5] 夏長亮,王明超,史婷娜,等. 基于神經網絡的開關磁組電機無位置傳感器控制[J].中國電機工程學報,2005,25(13):123 -128.
[6] 陳振,劉向東,靳永強,等. 采用擴展卡爾曼濾波磁鏈觀測器的永磁同步電機直接轉矩控制[J].中國電機工程學報,2008,28(33):75 -81.
[7] 王鐵成,徐永向,鄒繼明,等. 基于簡易位置檢測的高速永磁同步電機系統[J]. 哈爾濱工業大學學報,2005,57(3):388 -390.
[8] 朱宏偉,鄒繼斌. 低成本永磁同步電動機驅動器的軟硬件架構及實現[J].電機與控制學報,2007,11(4):345 -348.
[9] 鄒繼斌,徐永向,于成龍. 正弦波無刷直流電機的新型轉子位置檢測方法[J].中國電機工程學報,2002,22(12):47 -49.
[10] 周兆勇,徐征,李鐵才. 基于兩相正交開關霍爾傳感器的混合型轉子位置預估方案的FPGA 實現[J]. 電工技術學報,2004,19(1):61 -64.
[11] 徐征,李鐵才. 準無位置傳感器永磁同步電動機驅動系統中霍爾傳感器位置檢測誤差的分析及解決方案[J]. 中國電機工程學報,2004,24(1):168 -173.
[12] 徐永向,鄒繼明,趙猛,等. 基于單霍爾傳感器的PMSM 位置檢測方法[J]. 哈爾濱工業大學學報,2008,40(11):1769 -1772.
[13] 劉曉,葉云岳,鄭灼,等. 一種低成本的線性霍爾位置檢測方法研究[J]. 浙江大學學報(工學版),2008,42(7):1204 -1207.
[14] 郝雙暉,劉勇,郝明暉.絕對式多極磁電軸角編碼器的設計[J].光學精密工程,2010,18(4):863 -871.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
