偏流角修正對主動推掃成像品質影響分析
2015-03-12 10:26:46閆鑫韓雪川張永
航天返回與遙感 2015年6期
閆鑫 韓雪川 張永
(1 中國空間技術研究院 載人航天總體部,北京 100094)
(2 北京空間機電研究所,北京 100094)
0 引言
非沿跡主動推掃成像主要是衛星通過姿態機動、結合飛行地速建立某一特定的掃描速度,實現對某一條帶或某一組一般軌跡目標的掃描成像;可快速獲取某一方向的條帶區域成像,提高衛星對海岸、邊境、公路、鐵路等關注目標的成像效率。可實現對任意地標軌跡的連續成像。它是一種應用前景非常廣闊的工作模式,被認為是未來遙感成像的“倍增器”和熱點技術,是國外先進的遙感衛星的必備技術之一、并已取得了實際應用。
針對采用時間延遲積分電荷耦合器件(time delayed and integration charged coupled device,TDICCD)進行掃描成像,其由于衛星高速運行與姿態機動,成像目標隨地球自轉等因素,使TDICCD線陣移動方向與目標像移方向會出現一定的角度偏差,導致偏流角的產生,降低相機 MTF和圖像的分辨率,導致圖像模糊,影響成像品質。
偏流角修正及其對圖像品質影響,國內外學者已經進行了深入的研究,形成了豐富的研究成果。常規成像時,僅有地球自轉運動、衛星姿態不變化的偏流角研究相對成熟,偏流角的產生機理和計算方法明確[1-2],并針對偏流角修正方法開展了研究。針對TDICCD相機,文獻[3]分析了偏流角對三線陣TDICCD相機的影響,文獻[4]闡述了星下點成像及側擺固定角度成像時偏流角計算,文獻[5-6]分析了衛星姿態變化時的偏流角計算。針對偏流角修正,文獻[7]提出采用在光學相機中加入偏流角調整機構實現偏流角調整,文獻[1]采用整星偏航的方式修正偏流角。但偏流角修正不可避免的存在誤差,無法實現完全補償,影響成像品質。文獻[8-11]通過計算成像調制傳遞函數(MTF)值,分析了偏流角及其修正誤差對成像品質的影響。
上述的偏流角及其對成像品質的研究主要還是針對常規成像模式,針對非沿跡主動推掃成像模式的研究還未見有報道。因此,本文對非沿跡主動推掃成像的偏流角開展研究,建立偏流角計算及修正精度模型,通過分析偏流角修正精度對成像 MTF的影響評價對成像品質的影響,具有重要的實際價值和工程意義。
1 非沿跡主動推掃成像模型
偏流角的產生及修正與攝影地速直接相關,傳統成像由軌道飛行速度和地球自轉產生,非沿跡主動成像時,影響因素還包括姿態機動產生的速度。
1.1 攝影地速
傳統遙感衛星對地成像時,相機視軸對地不變化,設VO為目標點線速度,地速V攝影是目標點線速度VO的相對速度與地球自轉線速度Ve的合速度[12],η為推掃方向與衛星飛行方向的夾角,如圖1所示。

圖1 攝影地速分析Fig.1 Photography land speed analysis
攝影地速可表示為:

非沿跡主動推掃成像時,相機推掃速度方向與衛星星下點速度方向不共線,從而導致攝影地速有別于傳統攝影地速的定義,如圖2所示。其中,S為衛星在軌道上的位置;M為成像目標點;L為衛星與目標點距離;O為星下點;T為側擺點;a為衛星主動推掃角度。
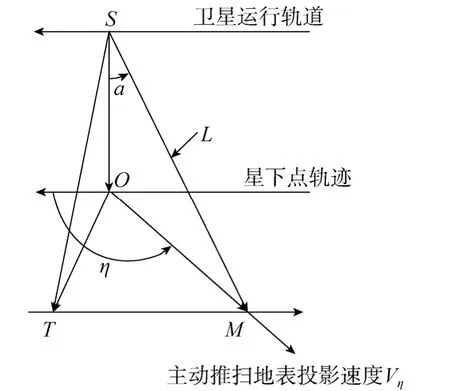
圖2 非沿跡主動推掃成像數學模型Fig.2 Model of no-along trajectory active push-sweeping imaging
由圖2可知,攝影地速V攝影是載荷視軸推掃線速度Vη、地球自轉線速度Ve和目標點M相對衛星在軌運動的相對速度的合速度:

式(2)轉換為矢量方程如下式所示:

設攝影地速在大地坐標系的矢量為[ ]Tx y z ;i,o分別表示矢量在慣性系和軌道下的描述;Cid為慣性坐標系與大地坐標系的轉換矩陣;Coi為軌道坐標系與慣性坐標系的轉換矩陣。R為地球半徑在慣性系下矢量;eω為地球自轉角速度;oω為衛星星下點相對地心的運行角速度;ηω為光學相機的推掃速度。
1.2 積分時間
低軌遙感衛星相機采用TDICCD成像,積分時間是很重要的成像參數,敏捷工作模式的積分時間設置與遙感衛星積分時間設置有很大不同,衛星進行主動推掃模式成像時,表現為“動中成像”[13],觀測斜距、相面掃描速度變化劇烈,導致積分時間快速變化,對成像品質影響較大。
積分時間計算如下:

式中 Tint為積分時間;l為 TDICCD的像元尺寸;f為星上相機的焦距;vr為衛星本體系內目標區域相對像平面移動速度;vl為像面上像移速度。
2 偏流角修正
2.1 傳統偏流角修正及精度
(1)偏流角修正
傳統衛星對地成像過程中,相機光軸對地指向保持不變,與衛星星下點運動方向相同,此時產生的偏流角主要是由于目標點的地球自轉線速度造成的,如圖3所示。

圖3 偏流角示意Fig.3 Drift angle schematic diagram
星下點速度與相機速度一致的情況下,偏流角為星下點速度與目標速度(星下點速度與地球自轉速度的合速度)的夾角β可描述為:

式中 Vp2、Vp1分別為合速度的橫向分量和縱向分量;傳統模式成像時,衛星三軸姿態指向固定,推掃方向與衛星飛行方向的夾角η不變,隨著目標地緯度的增加,地球自轉線速度減小,造成偏流橫向分量減小,偏流角相應減小。
(2)偏流角修正精度
偏流角修正精度取決于對成像品質的要求、相機載荷參數等因素。設偏流角修正精度為Δφ;相機積分級數為N;若用戶要求橫向偏差允許最大剩余量為ΔL2,則有關系:

由此確定偏流角修正精度Δφ。
2.2 推掃成像偏流角修正及精度
與傳統的被動式推掃成像不同,非沿跡主動推掃成像過程中載荷視軸指向不斷變化,在成像某一時刻,當前目標區域點位M,不計偏流角的影響時,下一時刻的目標點應為M1,但由于星下點相對線速度和地球自轉線速度的影響,產生了偏流效應,導致下一時刻目標點偏離到M2,如圖4所示。

圖4 非沿跡主動推掃成像偏流角Fig.4 Drift angle of no-along trajectory active push-sweeping imaging
設衛星軌道六要素為軌道傾角i;升交點赤經Ω;軌道高度為h;偏心率e;真近點角fsat;近地點幅角ωsat。

圖5 非沿跡主動推掃成像偏流角計算Fig.5 Drift angle calculation of no-along trajectory active push-sweeping imaging
圖5中, Osxoyozo為衛星的軌道坐標系(O系); OexIyIzI為地心慣性坐標系;Oc為相機坐標原點。圖中各位置矢量關系如下:

式中 Rst為由衛星質心指向目標點T的矢量;Ret為由地心指向側擺點T的矢量;Res為地心指向衛星質心的矢量;Rct為衛星相機載荷像中心至目標點T的矢量;Rsc為衛星質心指向相機載荷像中心的矢量。
將矢量Rst在軌道坐標系(O系)下表示有:


將矢量Rst在衛星本體坐標系(b系)下表示為:,AbO表示軌道坐標系O系到b系的轉換矩陣。
將Rct在相機坐標系(c系)下表示為:

對公式(10)兩邊求導,因為相機安裝位置固定,所以有:

因而,



3 成像品質影響
TDICCD相機的特點要求曝光控制與衛星飛行速度同步。如果有誤差,TDI的多級CCD像元不能精確對同一目標成相[14]。像移是影響星載TDICCD相機成像品質的重要因素[15]。定義單級不同步誤差產生的像移為Δφ,則N級積分造成的調制傳遞函數可以近似表示為:

式中 v為所成圖像的空間頻率,一個積分周期內由偏流角造成的像移Δφ為[8]:

式中 β為偏流角;l為像元尺寸。
TDICCD線陣對與飛行方向不垂直的角度誤差很敏感,要求線陣與飛行方向的垂直精度很高才能保證照相相質。其調制傳遞函數可以近似表示為:

工程上,目前技術條件下,為保證成像品質,一般要求光學系統成像MTF值達到0.9的水平
4 仿真分析
為進行非沿跡主動推掃成像的偏流角計算及修正前后對成像品質的影響分析,設定航天器軌道高度400km,軌道傾角42.7°,分別計算推掃角度、推掃角速度、推掃方向與衛星飛行方向夾角η變化時偏流角隨目標點地理緯度變化,同時,進行成像MTF計算時,選擇像元尺寸7μm,積分級數選擇為96級,目標點地理緯度選取–100°~100°。仿真結果如下:
(1)不同推掃角度和角速度的影響分析
某一時刻,推掃角度分別取值為0°、10°、20°、30°,圖2中η角分別取值120°,推掃角速度1.5(°)/s,用于描述非沿跡主動推掃,得到隨目標點地理緯度變化的偏流角及對應MTF值分別如圖6和圖7所示;推掃角度分別取值為20°,圖2中η角分別取值120°,推掃角速度2(°)/s、4(°)/s、6(°)/s、8(°)/s,不同地理緯度對應的偏流角及對應MTF值分別如圖8和圖9所示,對應成像MTF值分別如7、圖9所示,這里僅給出目標點地理緯度在–100°~0°范圍的仿真結果,地理緯度0°~100°范圍的偏流角仿真結果與之相對于0°緯度對稱。

圖6 推掃角度不同時的偏流角Fig.6 Drift angle of different push-sweeping angles

圖7 偏流角對應的MTF值Fig.7 MTF of drift angle

圖8 推掃角速度不同時的偏流角Fig.8 Drift angle of different push-sweeping angular rate

圖9 偏流角對應的MTF值Fig.9 MTF of drift angle
由圖6可知,僅推掃角度變化時,隨著推掃角度增加,同一地理緯度對應的偏流角逐漸減小,且減小的幅度隨著推掃角度變化逐漸增大;同時,從圖6、圖8可以看出,同一推掃角度時,目標點地理緯度越小,對應的偏流角越小,0°時偏流角最小,航天器需具備不小于25.3°的偏流角修正能力;由圖8可知,僅推掃角速度變化時,隨著推掃角速度增加,同一地理緯度對應的偏流角逐漸減小,且減小的幅度隨著推掃角度變化逐漸減小,此種條件下,航天器需要具備不小于19.2°的偏流角修正能力。
對于偏流角對成像MTF值的影響,由圖7、圖9可知,存在圖6、圖8所示偏流情況下,成像MTF值不大于0.02、0.08,與成像品質所需要的至少0.9的MTF值相比,無法滿足成像要求,因此需要進行偏流角修正,且從圖7、圖9可知,偏流角越小,對應的MTF值越高。
(2)不同η角的影響分析
某一時刻,推掃角度分別取值為20°,推掃角速度2(°)/s,圖2中η角分別取值100°、120°、140°、160°,不同地理緯度對應的偏流角和對應MTF分別如圖10和圖11所示;同時,為了闡述垂直于非沿跡主動推掃時漂流角與垂直于跡向推掃的不同,選擇η為90°進行仿真,并與非沿跡時η為120°時進行對比,仿真結果如圖12和圖13所示。

圖10 η角不同時的偏流角Fig.10 Drift angle of different η

圖11 偏流角對應MTF值Fig.11 MTF of drift angle

圖12 垂直于跡向推掃(η=90°)時偏流角Fig.12 Drift angle with push-sweeping vertical trace

圖13 偏流角對應MTF值Fig.13 MTF of drift angle
由圖10、圖12可知,針對非沿跡主動推掃成像,推掃角度和角速度不變,僅η角變化時,同一目標點緯度對應偏流角隨著 η角增加(η>90°)逐漸減小,且減小幅度逐漸加快,航天器需要具備不小于 24.1°的偏流角修正能力;垂直于跡向進行推掃成像時(η=90°)時,偏流角明顯大于非沿跡主動推掃成像(η>90°),航天器需要具備不小于 26°的偏流角修正能力,說明垂直于跡向進行推掃成像時偏流角最大。
同樣,η角變化時,在圖10、圖12所示偏流角的情況下,成像MTF值最大不超過0.08,對于垂直于軌跡的情況,其最大MTF不超過0.015,無法滿足成像任務對MTF達到0.9以上的要求,需要采取措施對偏流角實施補償。
為分析偏流角修正精度對成像品質的影響,參考目前高精度遙感任務,設定成像品質要求橫向允許像移量不超過0.2個像元,則對應不同TDI積分級數需要的偏流角修正精度如表1所示。

表1 不同積分級數對應偏流角修正精度Tab.1 Drift angle correction precision of different integral series
5 結束語
針對非沿跡主動推掃成像時的偏流角修正及對成像品質的影響,明確了非沿跡主動推掃成像的定義,建立了有別于傳統成像模式的攝影地速計算模型,完成了該模式下偏流角計算的數學建模,開展了偏流角對成像 MTF影響的分析,并基于以上工作,完成了衛星在不同推掃角度、推掃角速度、與跡向不同角度時偏流角和成像MTF值的計算與仿真分析,仿真結果表明:推掃角度在0°~30°之間、推掃角速度不超8(°)/s、與跡向成90°~160°進行推掃成像,對應的偏流角最大接近26°,成像MTF值不超過0.08,與工程上要求的MTF值最低不小于0.9的要求差距較大,不進行偏流角補償的情況下,無法滿足工程需要。該分析方法綜合考慮了任務及載荷特征參數,可用于未來非沿跡主動推掃成像的任務分析,具備實際的工程意義。
(
)
[1] 袁孝康. 星載TDICCD推掃相機的偏流角計算與補償[J]. 上海航天, 2006, 23(6): 10-13. YUAN Xiaokang. Calculation and Compensation for the Deviant Angle of Satellite Borne TDICCD Push Scan Camera[J]. Aerospace Shanghai, 2006, 23(6): 10-13. (in Chinese)
[2] 胡莘, 曹喜濱. 三線陣測繪衛星的偏流角改正問題[J]. 測繪科學技術學報, 2006, 23(5): 321-324. HU Xin, CAO Xibin. The Correction of Drift Angle of the Three-line Array Mapping Satellite[J]. Journal of Zhengzhou Institute of Surverying Mappingan, 2006, 23(5): 321-324. (in Chinese)
[3] 楊居奎, 許敬旺. 偏流角對三線陣TDICCD測繪相機的影響分析[J]. 航天返回與遙感, 2006, 27(4): 27-32. YANG Jukui, XU Jingwang. The Effect of the Drift Angle on Three-line TDICCD Mapping Camera[J]. Spacecraft Recovery & Remote Sensing, 2006, 27(4): 27-32. (in Chinese)
[4] 景泉. 敏捷衛星偏流角計算模型研究[J]. 航天器工程, 2012, 21(4), 16-20. JING Quan. Research on Computation Model of Bias Angle for Agile Satellite[J]. Spacecraft Engineering, 2012, 21(4), 16-20. (in Chinese)
[5] 黃群東, 楊芳, 趙鍵. 姿態對地指向不斷變化成像時的偏流角分析[J]. 宇航學報, 2012, 33(10): 1544-1551. HUANG Qundong, YANG Fang, ZHAO Jiang. Drift Angle Analysis for Agile Satellite Imaging When Its Attitude Points to the Earth Changing Continuously[J]. Journal of Astronautics, 2012, 33(10): 1544-1551. (in Chinese)
[6] 黃群東, 楊芳, 趙鍵. 姿態對地指向不斷變化成像時的像移速度計算[J]. 光學精密工程, 2012, 20(12): 2812-2820. HUANG Qundong, YANG Fang,ZHAO Jiang. Calculation of Image Motion Velocity for Agile Satellite Dynamic Imaging to Changed Continuously Attitude Point[J]. Optics and Precision Engineering, 2012, 20(12): 2812-2820. (in Chinese)
[7] 李友一. 空間相機中的偏流角控制[J]. 光學精密工程, 2002, 10(4): 402-406. LI Youyi. Study of the Drift Angle Control in a Space camera[J]. Optics and Precision Engineering , 2002, 10(4):402-406.(in Chinese)
[8] 楊秀彬, 賀小軍, 張劉, 等. 偏流角誤差對TDICCD相機成像的影響與仿真[J]. 光電工程, 2008, 35(11): 45-50. YANG Xiubin, HE Xiaojun, ZHANG Liu, et al. Effect and Simulation of the Deviant Angle Error on TDI CCD Cameras Image[J]. Opto-electronic Engineering, 2008, 35 (11): 45-50. (in Chinese)
[9] 晉利兵, 馬文坡, 唐紹凡, 等. 偏流角對品字形拼接探測器成像的影響[J]. 航天返回與遙感, 2014, 35(2): 69-75. JIN Libing, MA Wenpo, TANG Shaofan. et al. Effect of the Drift Angle on Imaging of Three Non-collinear CCD Chips[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(2): 69-75. (in Chinese)
[10] 李曉云, 杜偉. 星載TDICCD相機像移對成像質量的影響分析[J]. 航天器工程, 2011, 20(3): 51-55. LI Xiaoyun, DU Wei. Analysis of Image Motion Effect on Satellite TDICCD Camera Image Quality[J]. Spacecraft Engineering, 2011, 20(3): 51-55. (in Chinese)
[11] 攀超, 李英才, 易紅偉. 偏流角對TDICCD相機像質的影響分析[J]. 光電工程, 2007, 34(9): 70-74. PAN Chao, LI Yingcai, YI Hongwei. Influence Analysis of Drift Angle on Image Quality of TDICCD camera [J]. Opto-electronic Engineering, 2007, 34(9): 70-74. (in Chinese)
[12] 陳紹龍. 側擺攝影偏流角和速高比的計算模型[J]. 航天器工程, 2010, 19(1): 36-40. CHEN Shaolong. Computation Model of Veer Angle and Velocity-Height Ratio for Space Camera in Roll Attitude [J]. Spacecraft Engineering, 2010, 19(1): 36-40. (in Chinese)
[13] JEAN J, ERIC J, GERARD L, et al. Attitude Duidance Technics Developed in CENS for Earth Observation and Scientific Missions[C]. The 28thAnnual AAS Guidance and Control conference, Breckeridge, 2005: 11-16.
[14] MIKKER B M, RUBINOVICH EY. Image Motion Compensation at Charge-coupled Device Photographing in Delay-integration Mode [J]. Automatic and Remote Control, 2007, 68(3): 11-16.
[15] 莊緒霞, 王治樂, 阮寧娟, 等. 像移對星載 TDICCD相機成像品質的影響分析[J]. 航天返回與遙感, 2013, 34(6): 66-73. ZHUANG Xuxia, WANG Zhile, RUAN Ningjuan, et al. Influence Analysis of Image Motion on Image Quality of Satellite-board TDI Camera Optical System[J]. Spacecraft Recovery & Remote Sensing, 2013, 34(6): 66-73. (in Chinese)