載人登月月面軟著陸緩沖裝置設計與分析
2015-03-12 10:26:46王永濱蔣萬松王磊黃偉
航天返回與遙感 2015年6期
關鍵詞:設計
王永濱 蔣萬松 王磊 黃偉
(北京空間機電研究所,北京 100094)
0 引言
隨著世界各國對空間探測技術的關注與研究,各類深空探測任務對空間探測的星表著陸能力提出了非常強烈的需求。目前成功實現深空探測著陸的途徑主要包括支架式著陸緩沖裝置著陸和氣囊著陸。在進行載人登月探測活動中,需要采用著陸緩沖裝置吸收探測器在月球表面著陸沖擊過程中所產生的沖擊能量,確保將月面載荷作用于探測器結構和艙載設備的過載系數減小到系統設計范圍之內,保證航天器及其內部結構不因月面沖擊載荷過大而受到損傷,著陸緩沖裝置是著陸器月面著陸的關鍵系統。此外,通過著陸緩沖裝置建立返回的平臺,而著陸緩沖氣囊不具備這樣的功能,故在進行載人登月探測活動時需要采用支架式著陸緩沖裝置進行著陸緩沖[1]。
國內外相關科研機構針對不同的適用環境和指標要求,對載人登月艙月面著陸緩沖裝置進行了大量的理論和應用研究。美國航空航天局(圖1(a)~(b))[2-5]、美國SpaceX公司(圖1(c))、歐空局(圖1(d))[6]和俄羅斯(圖 1(e)~(f))[7]等國家和機構均針對載人登月相關任務需求開展了月面著陸緩沖裝置的研究[1]。目前成功實現載人月球探測只有美國“阿波羅”系列月球著陸器[8-9](圖1(a)),其設計理念和方法對于載人登月軟著陸緩沖裝置的設計有十分重要的借鑒意義。
國內針對載人登月月面著陸緩沖裝置的研究相對有限,目前大多進行的是無人著陸器月面著陸研究。已實現在月球軟著陸的“嫦娥三號”月球著陸器采用基于鋁蜂窩的四支腿軟著陸緩沖裝置實現月面軟著陸器,著陸載荷約 1.3t。而載人月球著陸器著陸載荷在 7~10t之間,其設計理念和指標要求同無人月球著陸器有很大的不同。哈爾濱工業大學[10]和北京空間機電研究所針對載人登月艙著陸特性,已開展了載人登月艙著陸緩沖裝置原理樣機的研制工作(圖1(g)~(h)),相關設計均部分借鑒了“阿波羅”月球著陸器的研制經驗。本文以我國載人登月月面著陸任務需求為出發點,基于著陸緩沖裝置技術途徑選擇分析,采用理論與仿真相結合的方法,研制全尺寸載人登月月面軟著陸緩沖裝置,為后續工程實施提供技術支撐。

圖1 國內外載人登月艙著陸緩沖裝置Fig.1 Human Lunar landing gear research situation at home and abroad
1 著陸緩沖裝置技術途徑選擇
對于每一次登月任務,登月艙的軟著陸支架是最為關鍵的裝置之一。軟著陸支架能確保登月艙安全平穩地降落在月球表面,航天員得以順利出艙并進行月面探測活動。同時,軟著陸支架還起到月面上升器的發射架作用,保證航天員攜帶月球樣品可靠地由月面進入環月軌道,最終安全返回地球。著陸緩沖裝置涉及的相關技術主要包括著陸緩沖裝置支腿構型和緩沖方式。在著陸緩沖裝置的初始設計階段,著重從著陸緩沖裝置的數量、緩沖方法和構型等幾方面進行組合,提出盡可能多的設計方案[11]。
采用著陸緩沖裝置著陸時,至少需要三個著陸支點,支腿數量越多,著陸器的穩定性越好。但是,支腿數量增多會帶來系統質量增加。因此,要根據著陸器質量、著陸穩定性、運載器包絡尺寸等要求,綜合分析來確定支腿數量。對于大載重的著陸器,四條支腿的著陸緩沖裝置方案是一個較優的折中方案。
緩沖器是著陸緩沖裝置的核心緩沖部件,其主要作用是吸收探測器在著陸沖擊過程中所產生的沖擊能量。緩沖器的實質就是將探測器著陸時的動能耗散在緩沖器內部緩沖材料及著陸腿結構變形上。目前常用的緩沖器主要包括可壓縮吸能緩沖裝置、液壓緩沖裝置、機械緩沖裝置、磁流變及電磁阻尼緩沖裝置。可壓縮吸能緩沖裝置中最具代表性的是鋁蜂窩緩沖裝置,鋁蜂窩材料具有較低的密度,較高的比模量、比強度以及優良的耐熱性和抗腐蝕性,采用鋁蜂窩材料的緩沖裝置還具備結構簡單和緩沖行程大等優點,故本文的緩沖裝置最終選用鋁蜂窩材料實現緩沖。
2 著陸緩沖裝置方案設計
針對載人登月任務設計的軟著陸緩沖裝置采用四腿、懸臂式的構型,四個緩沖支腿沿著陸器對稱分布,結構布局如圖2所示。該著陸緩沖裝置采用鋁蜂窩緩沖方式,每條緩沖支腿由一個鋁蜂窩吸能的主支腿和兩個吸能的輔助支腿、展開架、展開鎖定機構以及足墊等組成。圖3所示為著陸緩沖裝置收攏和展開狀態示意圖。
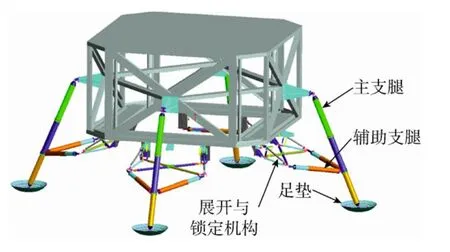
圖2 著陸器結構Fig.2 Landing gear structure
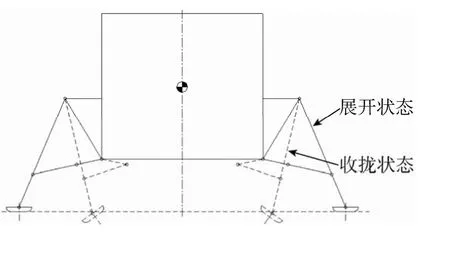
圖3 著陸器收攏和展開狀態Fig.3 Stowed and deployed state
2.1 緩沖支腿結構設計
緩沖支腿包括主支腿和輔助支腿。其中主支腿由內筒、外筒和鋁蜂窩組成。圖4為主支腿結構圖。在著陸瞬間,著陸沖擊力首先作用到內筒上,內筒將作用力傳到鋁蜂窩上,通過內外筒相對運動使鋁蜂窩進行壓縮并吸能。在考慮沖擊載荷緩沖時,除了對最大過載有要求,對初始沖擊過載的變化率也需要限定,以減小在結構和設備上產生的沖擊響應,因此方案中將緩沖鋁蜂窩設計成多級緩沖。設計單條主支腿能吸收60%~70%垂直方向的能量,則兩條主支腿可以吸收垂直沖擊能量。
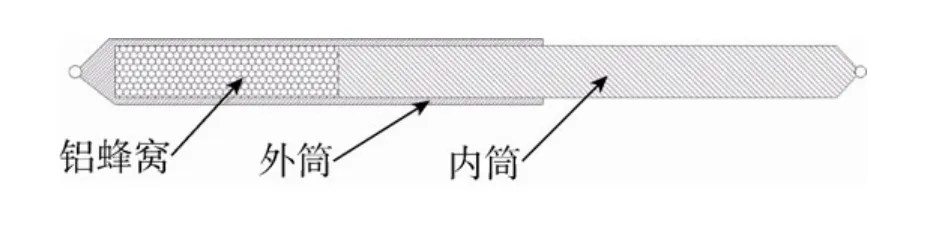
圖4 主支腿結構Fig.4 Primary strut structure
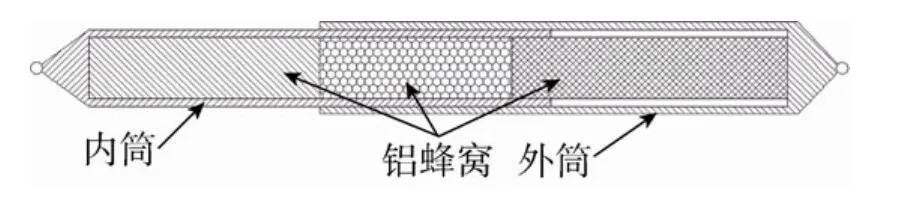
圖5 輔助支腿結構Fig.5 Secondary strut structure
圖5所示為輔助支腿結構,輔助支腿主要由受壓鋁蜂窩、內筒、受拉鋁蜂窩和外筒組成。其中受壓和受拉鋁蜂窩在著陸緩沖過程中承受橫向沖擊載荷。設計單條輔助支腿能吸收 70%~80%水平方向的能量,則兩條輔助支腿可以吸收全部水平沖擊能量。
2.2 展開鎖定機構設計
由于著陸緩沖展開直徑超過了運載器的包絡尺寸,因此必須考慮收攏和展開機構。為了保證展開可靠,采用了渦卷簧驅動連桿機構的方式實現著陸支腿的展開和鎖定。展開與鎖定機構由初始鎖定機構、展開機構和二次鎖定機構三部分組成。初始鎖定機構實現著陸支腿的收攏固定和解鎖,展開機構實現支腿的展開,二次鎖定機構實現支腿展開后的有效鎖定。
2.3 緩沖材料設計
該著陸緩沖裝置采用鋁蜂窩進行著陸緩沖。著陸緩沖裝置緩沖設計要求能夠有較高的壓縮強度,因此設計了適用于高壓縮強度的鋁蜂窩。對于不同的緩沖部位,依據計算結果進行鋁蜂窩直徑及強度的設計。設計的正六角形鋁蜂窩工作塌跨載荷約為臨界壓潰峰值載荷的63%。實際使用時,需要將鋁蜂窩進行預壓縮,以消除臨界壓潰峰值,保證緩沖過程的工作垮塌載荷保持平穩。
3 仿真分析驗證
3.1 緩沖結構及仿真模型建立
著陸器在著陸沖擊過程中,需要經歷一個瞬態沖擊載荷,能否經受得住這一力學環境是軟著陸能否成功的關鍵。如圖6所示為基于ADAMS軟件建立的著陸緩沖裝置軟著陸動力學仿真模型,用于分析著陸沖擊的瞬態響應。著陸器主支腿和輔助支腿內安裝了緩沖材料,并應用ADAMS二次開發接口設計了著陸沖擊動力學分析子程序。應用該模型分析了月球著陸器的著陸姿態、著陸速度、地面坡度和月壤粘性對著陸性能的影響。
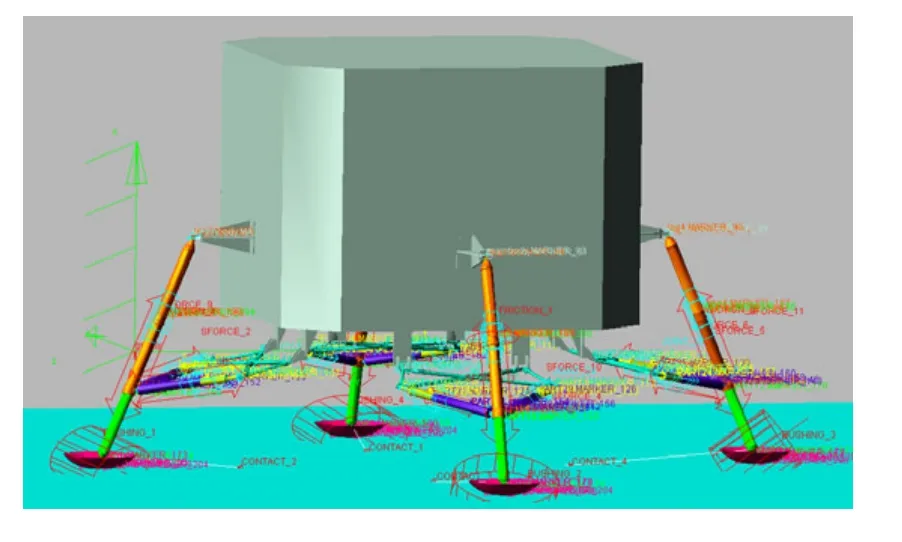
圖6 著陸沖擊仿真模型Fig.6 Landing model of impact simulation
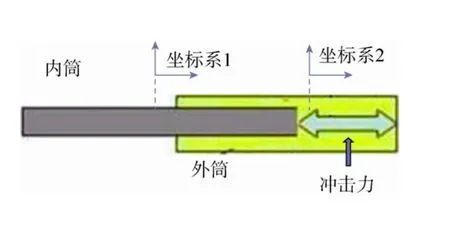
圖7 主、輔助支腿仿真模型Fig.7 Model of primary & second structures
主支腿和輔助支腿內裝有蜂窩,通過壓潰蜂窩吸收能量實現緩沖。蜂窩在壓潰過程中發生塑性變形,具有不可恢復性。輔助支腿結構形式可以使壓潰蜂窩能夠承受拉力和壓力。主、輔助支腿仿真模型如圖7所示。內筒和外筒可沿同軸滑動,通過移動副定義,即內筒和外筒之間只有一個相對滑動的自由度。在內筒和外筒上分別固定兩個平行的坐標系(可選各自質心),兩個坐標系之間的相對位置相對于初始狀態沿共軸方向的位移定義為變形量,用x表示,負值表示壓縮,正值表示拉伸。在仿真過程的每一積分步長,通過子程序記錄變形量的最大值(xmax)和最小值(xmin)。
由于蜂窩壓潰后不可恢復,其力學性質表現為彈塑性和特有平臺性(靜態壓垮載荷基本為定值),并與沖擊速度有關。單級蜂窩壓縮時的動態沖擊力Pd可表達為

式中 η為硬化系數;Pc為靜壓縮載荷;x0為平移量(若變形量x以mm為單位,則x0取3,使得雙曲正切函數曲線與鋁蜂窩平臺曲線一致);xmin為當前最小變形量(負值);δ(?)為邏輯函數,表示為

單級拉伸蜂窩(通過壓縮實現)的動態沖擊力Pd可表達為

式中 xmax為當前最大變形量(正值);Pt為靜拉伸載荷,對于同類型的蜂窩,Pt和式(1)中Pc均為定值,可由試驗得到。
η表征了蜂窩的動態特性,例如沖擊速度在10m/s,η=1.2~1.3。η可用二次多項式近似,

式中 v為沖擊速度;a和b為待定系數,可由試驗數據得到,對于不同類型的蜂窩,系數有所不同。
多級蜂窩的動態沖擊力可由上述方法通過疊加得到[12]。此外在處理著陸器足墊與月壤的接觸問題時,將作用力分為法向力和摩擦力。在描述月壤的塑性特征時,結合其表面承載力、彈性系數和阻尼系數等特性對月壤進行了表征。相關參數參考了“阿波羅”登月艙和“探測者”系列著陸器著陸仿真所采用的月壤力學性質的描述[13-14]。
3.2 仿真分析結果
基于以上理論模型對著陸緩沖裝置進行了系統的仿真分析計算,涵蓋了不同的速度、坡度、質心、著陸形式等多種參數組合的工況,具體15種工況設置見表1。表1中1-2-1著陸模式是指一條主支腿先著陸,而后另外兩條主支腿同時著陸,最后一條主支腿再著陸;2-2著陸模式指兩條主支腿先同時著陸,而后另外兩條主支腿也同時著陸。兩種著陸方式中,2-2著陸模式相比1-2-1著陸模式更加嚴酷。
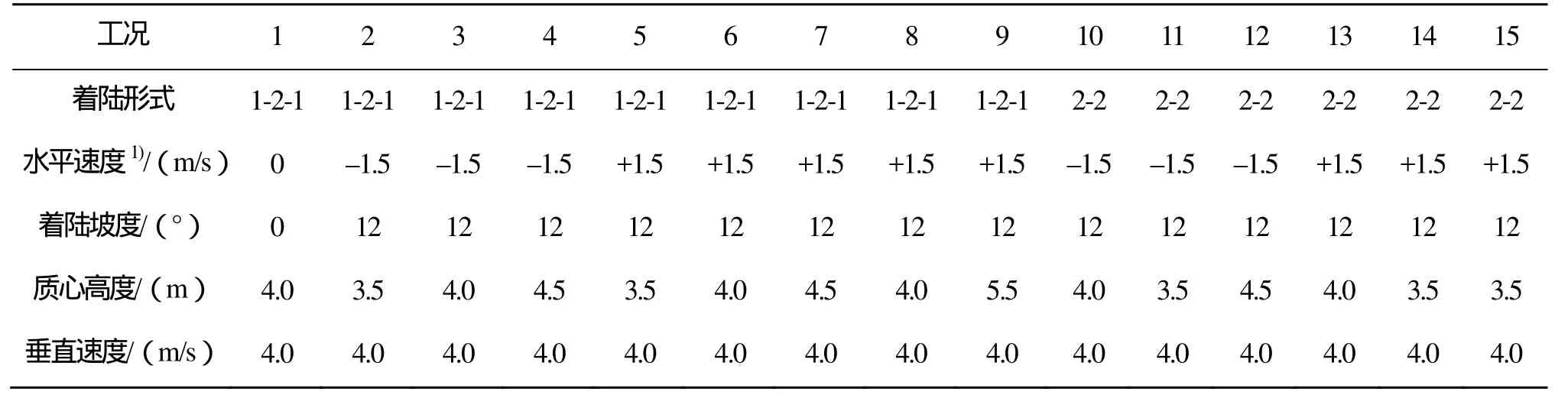
表1 仿真分析工況Tab.1 Conditions of simulation analysis
對表1所示的15種典型組合著陸工況(不同著陸模式、坡度、著陸速度、質心高度的組合)進行仿真分析,其中著陸沖擊過載仿真結果如表2所示。考慮到文章篇幅限制本文主要列舉了較為不利的工況11的著陸沖擊仿真分析結果(見圖8~圖11),其中圖8和圖9所示分別為主腿緩沖力和緩沖行程曲線,圖10和圖11所示分別為艙體著陸速度和加速度曲線。

表2 各工況下的著陸沖擊過載Tab.2 Landing impact overload under various operating conditions
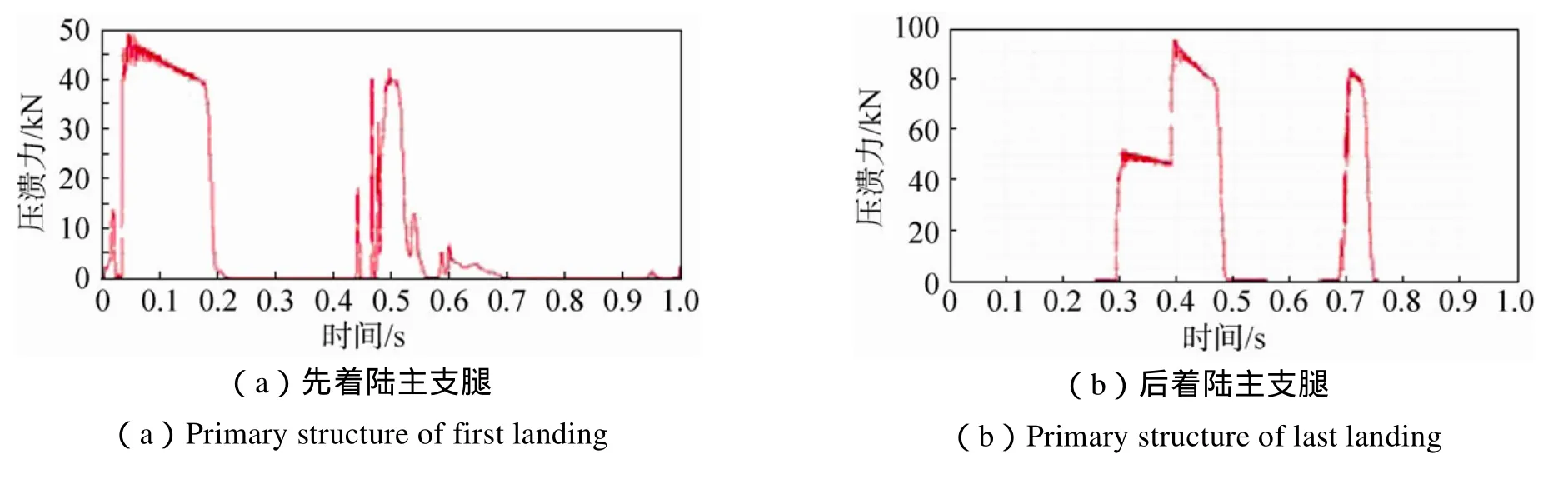
圖8 主支腿緩沖力Fig.8 Impact forces of primary structure
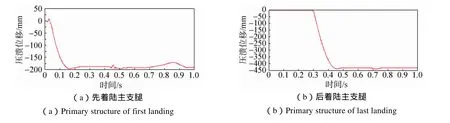
圖9 主支腿緩沖行程Fig.9 Buffer length of primary structure
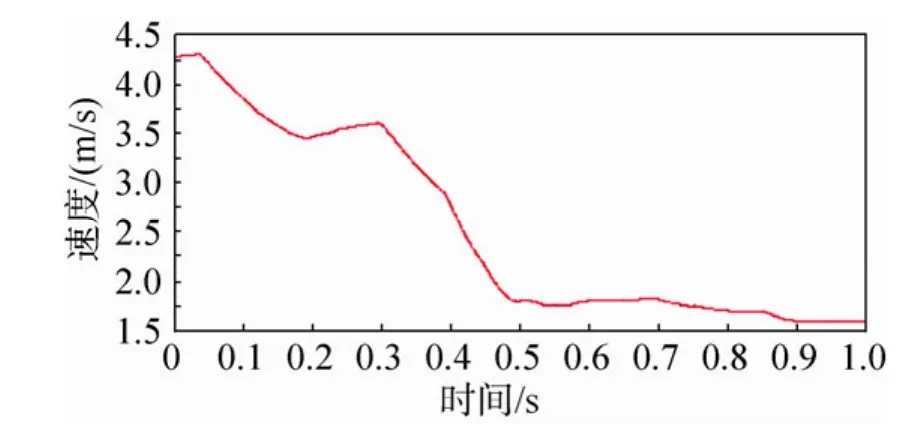
圖10 艙體著陸速度Fig.10 Landing velocity of the landing gear
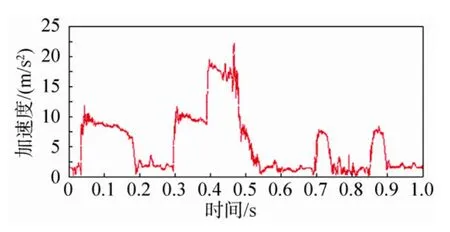
圖11 艙體著陸加速度Fig.11 Landing acceleration of the landing gear
通過對系統的著陸沖擊動力學分析,可以得出以下結果:
1)主支腿的兩級鋁蜂窩緩沖力分別為5kN和9.5kN,與設計值一致;
2)主支腿的緩沖行程(壓潰位移)為440mm,滿足緩沖行程要求;
3)15種典型工況下,著陸器著陸沖擊過載介于1.5~3.4gn之間,小于4gn,滿足載人航天器要求;
4)2-2著陸模式低頭正撞(月面坡度10°~20°)情況下是最惡劣的工況之一。
綜上分析,可以認為目前的設計較為合理。
4 結束語
本文介紹了一種載人登月月面著陸緩沖裝置,對該月面著陸緩沖裝置的設計思想進行了剖析,結合功能要求對技術途徑的選取進行了相關說明。在完成對載人登月月面軟著陸緩沖裝置設計和分析的基礎上,開展了著陸緩沖裝置原理樣機的研制,在國內首次研制出全尺寸載人登月著陸緩沖裝置,相關技術指標滿足設計指標要求。
通過仿真分析和原理樣機的地面試驗可以得出以下結論:1)鋁蜂窩的緩沖力和緩沖行程設計比較合理,主支腿和輔助支腿的緩沖效果較好;2)在給定的著陸條件下,模擬多種嚴酷工況下著陸器不存在翻倒的可能性;3)適當提高著陸器質心高度,對輔助支腿緩沖行程有利;4)著陸器本身著陸沖擊過載小于4gn,滿足載人航天器要求。
References)
[1] 陳金寶, 聶宏, 趙金才. 月球探測器軟著陸緩沖機構關鍵技術研究進展[J]. 宇航學報, 2008, 29(3): 731-735. CHEN Jinbao, NIE Hong, ZHAO Jincai. Review of the Development of Soft-landing Buffer for Lunar Explorations[J]. Journal of Astronautics, 2008, 29(3): 731-735. (in Chinese)
[2] Otto O R, Laurenson R M, Melliere R A, et al. Analyses and Limited Evaluation of Payload and Legged Landing System Structures for the Survivable Soft Landing of Instrument Payloads[R]. NASA CR-111919, 1971.
[3] Thomas J K.Manned Lunar Lander Design the Project Apollo Lunar Module(LM)[R]. AIAA92-1480, US: AIAA, 1992.
[4] William F R. Apollo Experience Report-Lunar Module Landing Gear Subsystem[R]. NASA TN D-6850, 1972.
[5] Polsgrove T, Button R, Linne D. Altair Lunar Lander Consumables Management[C]. AIAA Space 2009 Conference & Exposition, Pasadena, USA September 14-17, 2009.
[6] Karcz J, Davis S M , Aftosmis M J. Red Dragon: Low-cost Access to the Surface of Mars using Commercial Capabilities[R]. ARC-E-DAA-TN5262, 2012.
[7] 張蕊. 國外新型可重復使用飛船特點分析和未來發展[J]. 國際太空, 2010(12): 31-38. ZHANG Rui. Characteristics Analysis and Future Development of Foreign New Type Reusable Spaceship[J]. Space International, 2010(12): 31-38. (in Chinese)
[8] 沈祖煒. “阿波羅”登月艙最終下降及著陸綜述[J]. 航天返回與遙感, 2008, 29(1): 11-14. SHEN Zuwei. The Survey of Apollo LM during the Descent to the Lunar Surface[J]. Spacecraft Recovery&Remote Sensing, 2008, 29(1): 11-14. (in Chinese)
[9] 黃偉. “阿波羅”登月艙的軟著陸支架[J]. 航天返回與遙感, 2013, 34(4): 17-24. HUANG Wei. Apollo Lunar Module Landing Gear Subsystem[J]. Spacecraft Recovery&Remote Sensing, 2013, 34(4): 17-24. (in Chinese)
[10] 李萌, 劉榮強, 郭宏偉, 等. 腿式著陸器用不同拓撲結構金屬蜂窩吸能特性優化設計[J]. 振動與沖擊, 2013, 32(21) : 7-14. LI Meng, LIU Rongqiang, GUO Hongwei, et al. Crashworthiness Optimization of Different Topological Structures of Metal Honeycomb Used in a Legged-typed Lander[J]. Journal of Vibration and Shock, 2013, 32(21): 7-14. (in Chinese)
[11] 曾福明, 楊建中, 滿劍鋒, 等. 月球著陸器著陸緩沖機構設計方法研究[J]. 航天器工程, 2011, 20(2): 46-51. ZENG Fuming, YANG Jianzhong, MAN Jianfeng, et al. Study on Design Method of Landing Gear for Lunar Lander[J]. Spccecraft Engineering, 2011, 20(2): 46-51. (in Chinese)
[12] 蔣萬松, 黃偉, 沈祖煒, 等. 月球探測器軟著陸動力學仿真[J]. 宇航學報, 2011, 32(3): 462-469. JIANG Wansong, HUANG Wei, SHEN Zuwei, et al. Soft Landing Dynamics Simulation for Lunar Explorer[J]. Journal of Astronautics, 2011, 32(3): 462-469. (in Chinese)
[13] Scott R F. Apollo Program Soil Mechanics Experiment[R]. NASA CR-144438, 1975.
[14] Hinners N W. Lunar Soil Mechanics[R]. NASA-CR-116588, 1964.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04