多站高頻地波雷達目標檢測研究
2015-03-08 05:31:24文必洋石陽升王若琨
電波科學學報 2015年3期
關鍵詞:檢測
文必洋 石陽升 楊 靜 王若琨
(武漢大學電子信息學院,湖北 武漢430072)
引 言
高頻地波雷達具有海洋環境監測和低速目標檢測與跟蹤等方面的能力,得到世界沿海經濟與技術強國的高度重視.高頻地波雷達在海洋環境監測方面的技術[1-2],目前已經發展得相當成熟,已成為臨海國家監測專屬經濟區最有力的監測手段之一.相對于海洋環境監測,其在目標探測方面的應用則顯得十分滯后,相關技術仍處于發展和完善的過程當中[3-4].產生這一現象的原因是,海洋回波強度非常穩定,而低速運動目標回波強度變化很大,從而導致總體的檢測概率不盡如人意.
高頻雷達工作波長為數十米,與水面艦船的尺度為同一量級.這導致目標散射截面處于高頻波段的諧振區[5],目標的散射截面隨雷達工作頻率的變化很大.為此,黃曉靜等人進行了多站高頻地波雷達探測目標的研究[6],取得了較好的成效.另外,除雷達工作頻率、船只噸位和桅桿高度外[7-8],理論分析還表明,不同的雷達視角也會影響目標的雷達散射截面[9].本文從另一個方面——多站組網來研究高頻地波雷達的目標探測性能.
1 理論分析
1.1 恒虛警處理
進行目標檢測時,常用恒虛警處理的方法[10].根據Divito和Moretti的計算,均勻雜波背景下,使用線性檢波的單元平均恒虛警(Cell Averaging-CFAR,CA-CFAR),其虛警概率近似表達式為[11]

式中:Pfa是恒定的虛警率;c=4/π;m是滑窗長度;T是標稱化因子.
考慮到實際的數據處理過程中,檢測門限是比虛警率更加直觀的表達方式,且線性檢波時檢測門限γ和標稱化因子存在以下關系:

通過固定檢測門限和滑窗長度,由公式(1)、(2)得到相應的虛警率,表1是m=24時不同門限與虛警率的對應關系.三級檢測后[12],總的虛警率為該虛警率的平方.
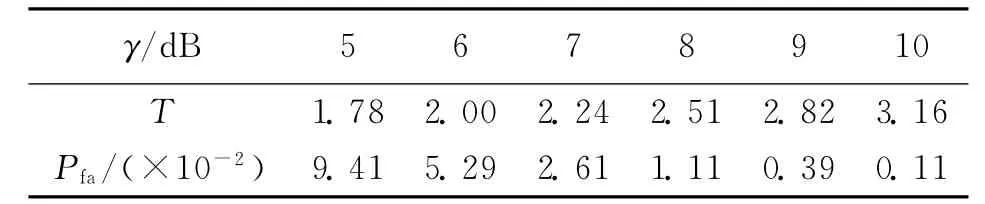
表1 不同檢測門限和虛警率的對應關系(m=24)
1.2 雷達組網檢測
當應用多部空間上相互分離的雷達照射同一區域時,就構成了雷達網絡,網絡中的各雷達可視為相互統計獨立.進行目標探測時,需要將多部雷達的數據進行融合,一種簡單的規則是:只要有一部雷達檢測到目標,檢測中心就可以作出目標存在的判決[13].
設網內共有L部雷達,其中第l部雷達的檢測概率為Pdl,總的檢測概率為Pd,于是有

而由文獻[14],均勻雜波背景下,使用線性檢波的CA-CFAR檢測器,其檢測概率為
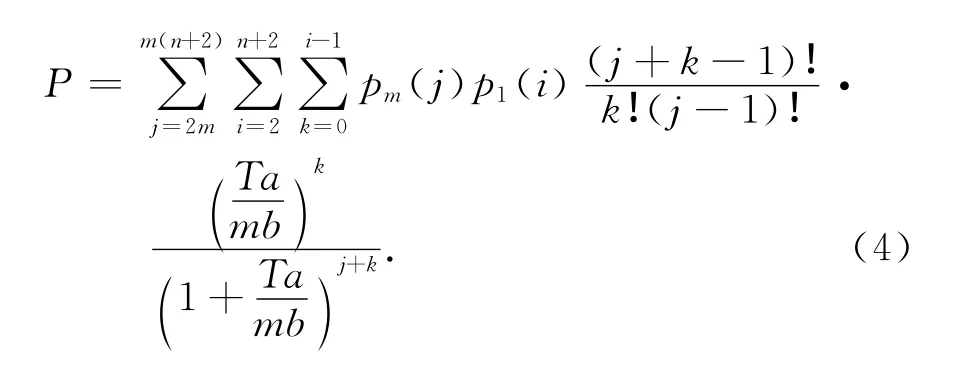
式中:n為任意大正整數;
SNR(Signal-Noise Ratio)為幅度表示的信噪比.
由于外界條件的差異,同一目標在網內不同雷達處顯示的信噪比往往是不一樣的,這會導致不同雷達對同一目標的檢測概率存在相應的差異.圖1給出了在兩部雷達組網的條件下,應用上述判決規則時聯合檢測概率隨單站檢測概率的變化趨勢.

圖1 聯合檢測概率隨單站檢測概率的變化曲面
2 實測數據處理
理論分析可知,多站可以有效提高目標的檢測概率.2013年底在渤海海域進行了組網試驗,在蓬萊站和北隍站各安裝了一套線性調頻中斷連續波體制的便攜式高頻地波雷達,發射天線是簡單的垂直極化的單極子天線,接收天線是單極子/交叉環天線[15],其法向分別為50°和125°,兩套雷達通過GPS信號進行同步,構成一個雷達網絡,從不同的視角共同照射同一片海域.為了得到比對數據,還在蓬萊站安裝了一套AIS接收機來獲取雷達照射海域內的目標信息.
2.1 單站目標探測
圖2是典型的雷達對某一目標單站探測的結果.圖中空心點表示在一段時間內目標被雷達檢測到的位置,而實心點則表示同一時間段內船舶自動識別系統(Automatic Identify System,AIS)記錄的該目標的位置.空心點跡比實心點跡少很多表明:單站條件下目標的檢測概率是相當低的,經常出現目標漏檢的情況.而影響檢測概率的一個很重要的因素就是檢測門限[16],通過改變檢測門限,來觀察不同門限下檢測概率的變化情況.

圖2 北隍單站檢測結果
檢測概率是通過下面的方法來計算的:將三級檢測得到的疑似目標信息與AIS記錄的目標信息進行匹配[17],兩者相差在一個距離元、兩個多普勒元之內的則認為匹配成功,將匹配成功的場次數除以總的場次數就可以得到檢測概率.對于匹配成功的目標,還要通過去重處理,從而保證雷達檢測到的目標(以下簡稱雷達目標)與AIS接收機獲取的目標(以下簡稱AIS目標)是一一對應的.
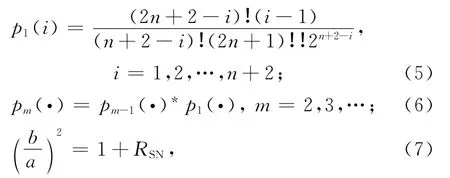
在2013年12月4日凌晨0點~3點之間的數據中,選出10條有代表性的船只航跡進行分析.如圖3所示,圖中每個距離環代表20km.這10條船只的基本信息示于表2中.按照Dzvonkovskaya的分類[18],除了一艘極大型和極小型船只外,剩下的8條都屬于小型和中型船只.
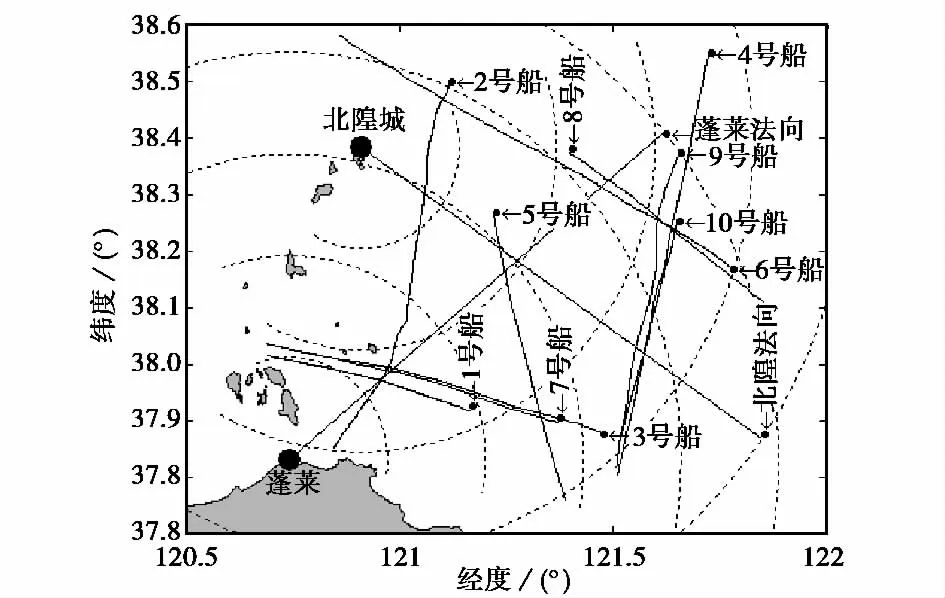
圖3 所選10條船只航跡分布圖

表2 所選10條船只的尺寸參數
按照前面所述檢測概率的計算方法,得到不同檢測門限下兩個雷達站對10條船只的檢測概率,如圖4和5所示.
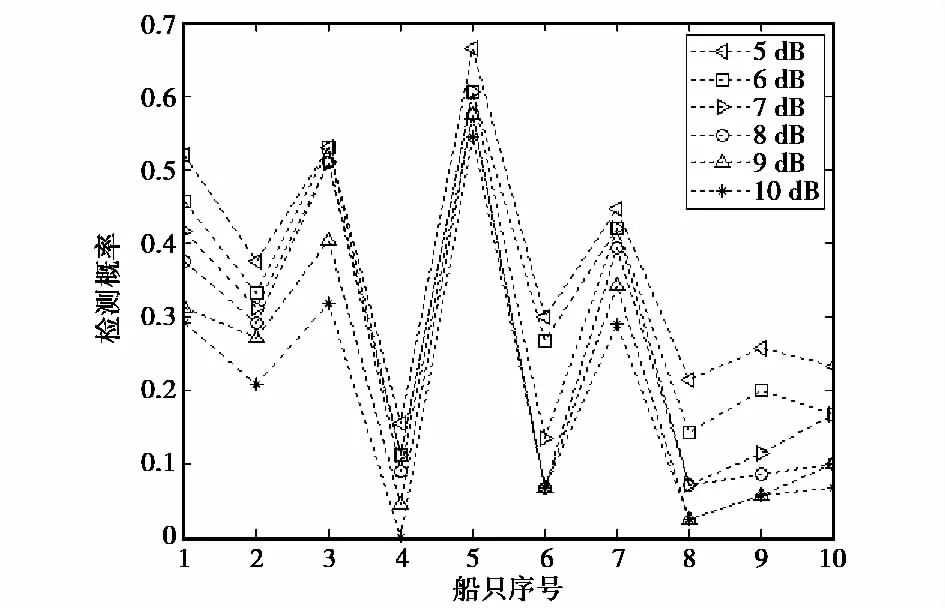
圖4 蓬萊站不同檢測門限下的檢測概率
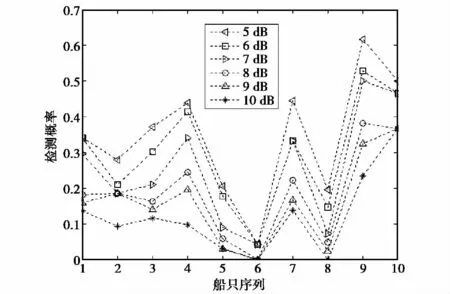
圖5 北隍站不同檢測門限下的檢測概率
從圖4可以初步得到以下結論:
1)隨著檢測門限的下降,檢測概率逐漸提高.一般來說,檢測門限每下降1dB,檢測概率會有3~5個百分點的提高;
2)檢測門限為5dB時,單站最高檢測概率接近70%,但多數情況下低于50%,而檢測門限上升到10dB時,部分船只出現檢測概率為0的情況;
3)同一雷達站對不同目標的檢測概率不同;
4)不同雷達站對同一目標的檢測概率也不一樣,兩者甚至可能相差很大.
在檢測門限為5dB時,第4條具體表現為:蓬萊站對4、9、10號船的檢測概率都在25%以下,而北隍站相應的概率都在40%以上;類似的,北隍站對5、6號船的檢測概率最高在20%左右而蓬萊站的則在30%以上;對8號船,兩個站對它們的檢測概率都僅有20%左右;而對1、2、3、7號船,兩個站對它們的檢測概率基本都在30%以上.
關于上述現象的產生原因現分析如下:
對4、9、10號船,它們有一個共同點就是與北隍站的距離都在60~80km的范圍內,而在接近一半的時間里它們與蓬萊站的距離都在80km以上甚至超過了100km,所以初步認為距離因素是導致兩個站對它們檢測概率相差較大的原因之一.
而對5、6號船,它們與北隍站的距離都在80 km之內,但是北隍站對它們的檢測概率卻低于20%.尤其是6號船,檢測概率最高也只有5%左右.分析發現,雖然它們與北隍站的距離和4、9、10號船的差不多,但是兩者一個最大的不同在于航向.對后者而言,船只航向與北隍站徑向的夾角在60°左右,電磁波是照射在船只的側面,而5、6號船的情況則相反,它們的航向與北隍站徑向的夾角很小,在遠距離處甚至在20°以下,因此電磁波是照射在船只的背面.而由表2可以知道,船只的長度比寬度高出一個數量級,所以電磁波照射在船只正面或背面時,它的雷達散射截面會比照射在側面時小很多,這會導致前者由于回波強度太低從而難以檢測.
同時由于5號船距蓬萊在60km之內,而6號船距蓬萊在80~100km之間,且電磁波是照射在兩條船只的側面,所以蓬萊站對前者的檢測概率最高時接近了70%,對后者雖然最高只有30%,但也已經比北隍站的5%高出許多.
另外進一步的分析發現,5號船在超過一半的時間內都被強烈的正一階峰所淹沒,這也是導致北隍站對它的檢測概率較低的另一個重要原因[19].
除此之外還有一個必須要考慮的實際情況是:由于地理條件的限制,北隍站的天線是架設在一個南面的山坡上的,因此對于6號船在北隍站以北行進的時間里,由于大山的阻擋,雷達是無法檢測到的.這一點同樣會影響到北隍站對2號船的檢測.
8號船的情況與6號船類似,只不過由于觀測時間段內它沒有行進到北隍以北的部分,所以雖然北隍站對它的檢測概率也很低,但檢測門限為5dB時也有20%,比6號船的5%高出很多.
對1、2、3、7號船,因為它們距兩個雷達站都在60km以內,而且對1、3、7號船,電磁波都是照射在它們的側面,所以在檢測門限為5dB時,兩個站對它們的檢測概率都在30%以上.由于之前提到的大山阻擋的原因,所以與其他三條船相比,北隍站對2號船的檢測概率稍低一些,略低于30%.
為了明確距離因素的影響,現對運動距離較長的目標進行分段統計,統計結果見表3.這里是以蓬萊站對2、4、9號船在檢測門限為5dB時的情況為例進行說明,選擇這三條船是基于兩個考慮:1)它們的距離跨度都較大;2)在整個運動時間內,它們的航向與雷達徑向夾角的變化相對較小,可以盡量排除其他因素的干擾.

表3 按距離分段統計檢測概率
而這三條船在全程的檢測概率分別為:37.5%,15.56%,25.71%,再結合分段統計的結果可以看出,近距離的檢測概率總是高于全程的檢測概率,而遠距離的情況則相反,由此也可驗證前面分析的準確性.
2.2 雷達視角的影響
以上只是對特定的10條船只的分析,現在將整個觀測時間內檢測到的船只隨距離、船只航向與雷達徑向夾角(以下簡稱夾角)的變化進行統計,蓬萊站的統計結果示于圖6中.圖中柱狀圖表示目標隨距離或夾角的分布情況(它表示位于不同距離/夾角的船只數量占總船只數量的百分比),而曲線則代表相應的累積分布函數(該函數表示不超過該距離/夾角的船只數量占總船只數量的百分比).
從圖6(a)中可以看出,AIS記錄的船只集中在25km和80km附近,這也是兩個主航道上的船只與蓬萊站的距離.雷達檢測的結果與此類似,只不過10dB檢測門限下,雷達在80km附近處檢測到的船只比例顯著下降,這正是由于距離太遠導致的,與我們前面的分析一致.
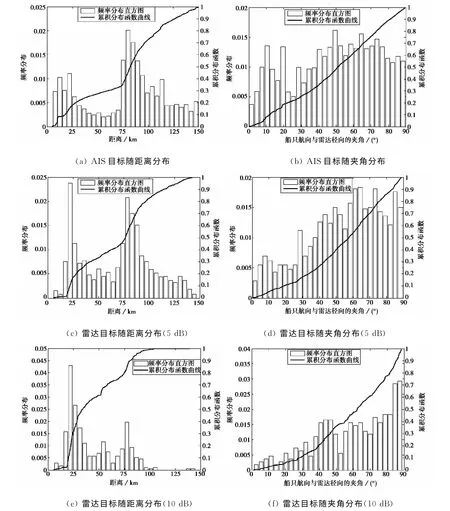
圖6 蓬萊站目標隨距離和夾角的分布情況
圖6(b)則告訴我們,AIS記錄的船只航向與雷達徑向夾角在0~90°范圍內近似于均勻分布,它的分布函數曲線是一條直線.而相應檢測的統計結果圖6(d)、(f)則表明:船只航向與雷達徑向夾角在0~90°范圍內不再服從均勻分布,相應的分布函數曲線也由直線變為下凹曲線,而且檢測門限越高,下凹程度越嚴重.這表明雷達對航向與雷達徑向夾角較小的目標的檢測能力是比較弱的,且檢測門限越高,這種能力越弱.這種現象在北隍站表現得更加明顯,兩個雷達站詳細的統計數據列于表4中.
從表4可以更加直觀地看出航向與雷達徑向夾角對檢測概率的影響:與AIS接收到的目標信息相比,10dB檢測門限下,雷達檢測出來的航向與雷達徑向夾角小于30°的目標比例下降的幅度超過50%,同時大于80°的目標比例則提高了2倍以上.
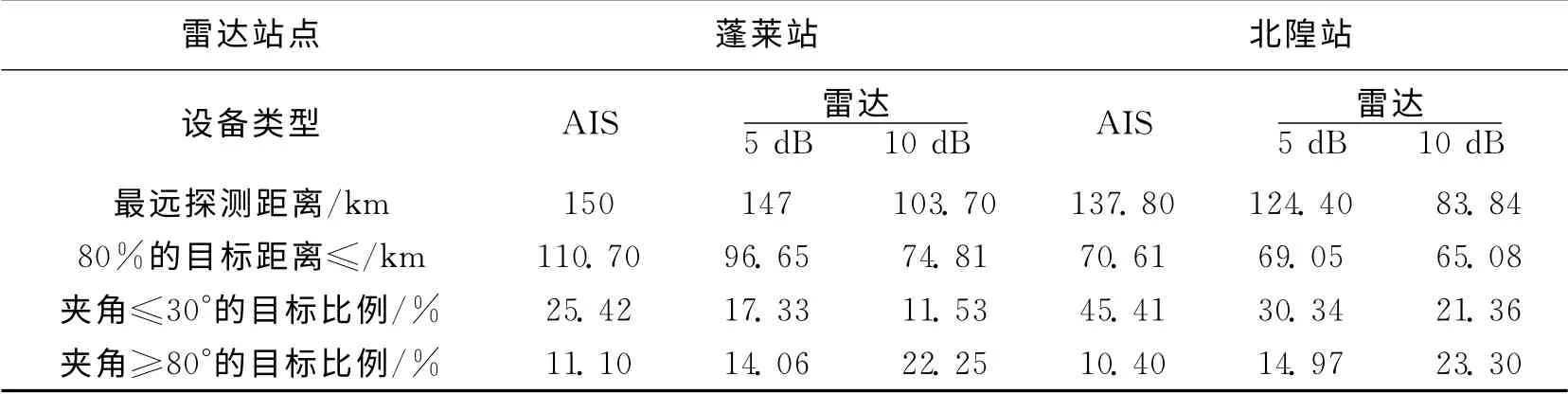
表4 蓬萊和北隍站目標的部分統計信息
2.3 雙站聯合探測
根據上述分析結果可知,單站條件下,目標與雷達站距離太遠、航向與雷達徑向夾角太小或者是徑速引起的頻偏剛好落在一階峰附近時,都會造成檢測概率的急劇下降.
而理論分析及仿真的結果都指出,雙站的利用能改變這個不利的狀況,有效提高檢測概率.于是聯合蓬萊和北隍兩個站的數據對目標進行聯合探測,只要目標被其中一個雷達站檢測到,就認為目標存在.
由此得到雙站條件下上述10條船只在不同檢測門限下的檢測概率,如圖7所示.可以看出,檢測門限為5dB時,已經有6條船只的檢測概率接近或超過了70%,最高時達到80%,雙站檢測概率相比單站有10~20個百分點的提高.即使檢測門限上升到10dB,也沒有出現某條船只檢測概率為0的情況,且相比單站仍有5~10個百分點的提高.
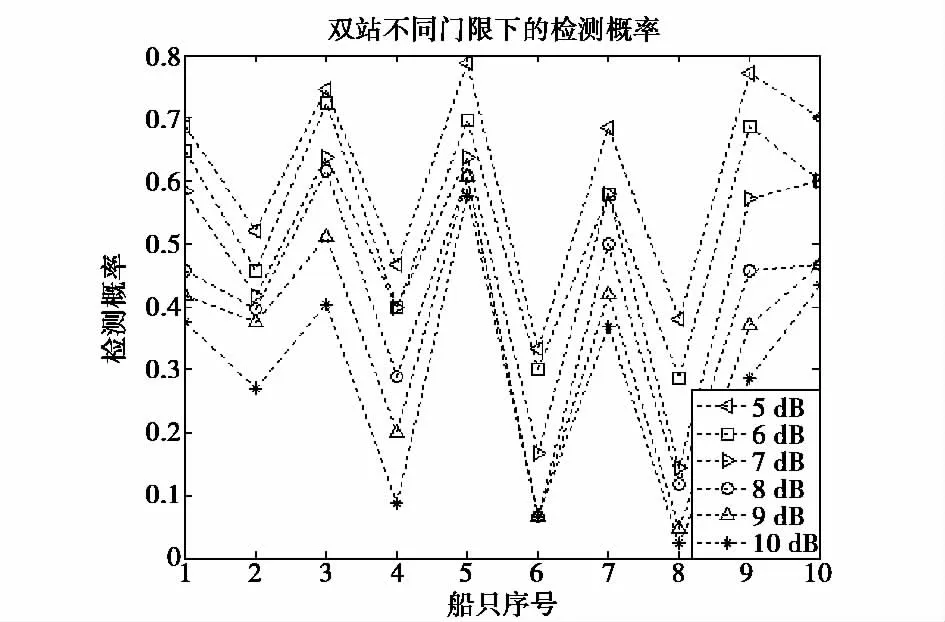
圖7 雙站不同檢測門限下的檢測概率
圖8給出了數據融合后檢測門限為5dB時實際的聯合檢測概率與理論檢測概率的對比及不同檢測門限下聯合檢測概率的平均誤差曲線.從圖中可以看出,聯合檢測概率平均誤差最大時也僅有3.5個百分點,最小時僅僅1個百分點,用實測數據得到的聯合檢測概率與理論值吻合得非常好.
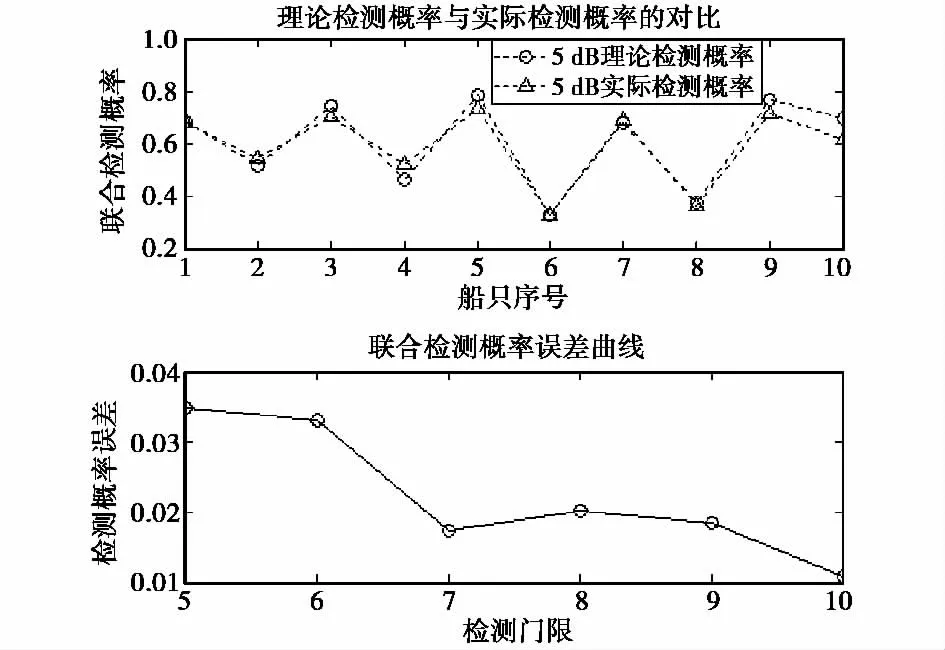
圖8 檢測概率對比及誤差曲線
3 結 論
通過利用AIS信息,對便攜式高頻地波雷達的目標探測性能作了分析,指出了影響單站檢測概率的幾個因素:檢測門限、距離、船只航向以及一階峰.由于單站條件下目標檢測概率很低,為了提高檢測概率,通過雷達組網,將雙站數據進行融合,使聯合檢測概率提高了10~20個百分點,最高可以達到80%,驗證了便攜式高頻地波雷達組網探測目標的可行性.
[1]TIAN Yingwei,WEN Biyang,ZHOU Hao.Measurement of high and low waves using dual-frequency broad-beam HF radar[J].IEEE Geoscience and Remote Sensing Letters,2014,11(9):1599-1603.
[2]周 浩,文必洋,吳世才,等.亞帆賽間便攜式高頻地波雷達的海態觀測[J].電波科學學報,2012,27(2):293-300.ZHOU Hao,WEN Biyang,WU Shicai,et al.Sea states observation with a portable HFSWR during the 16th Asian Games Sailing Competition[J].Chinese Journal of Radio Science,2012,27(2):293-300.(in Chinese)
[3]YANG Jing,WANG Ruokun,SHI Yangsheng,et al.Dual-use multistatic HF ocean radar for current mapping and ship tracking[J].IEICE Electronics Express,2014,11(12):1-6.
[4]ROARTY H J,SMITH M,GLENN S M,et al.Expanding maritime domain awareness capabilities in the arctic high frequency radar vessel-tracking[C]//Radar Conference.Ottawa:IEEE Press,2013:1-5.
[5]阮穎錚.雷達散射截面與隱身技術[M].北京:國防工業出版社,1998.
[6]HUANG Xiaojing,WEN Biyang,DING Fan.Ship detection and tracking using multi-frequency HFSWR[J].IEICE Electronics Express,2010,7(6):410-415.
[7]HYNES H,GARDNER R E.Doppler spectra of S band and X band signals[J].IEEE Transactions on Aerospace and Electronic System,1967,3(6):356-365.
[8]PEDERSON L,BARRICK D E.HF surface-wave radar revisiting a solution for EEZ ship surveillance[R/OL].[2014-06-27].http://www.codar.com/images/about/BarrPedeEEZ2004.pdf
[9]劉玉偉.高頻地波雷達船只目標RCS預估[D].青島:中國海洋大學,2011.LIU Yuwei.Estimation of Ship Target Radar Cross Sections for HFSWR[D].Qingdao:Ocean University of China,2011.(in Chinese)
[10]何 友,關 鍵,孟祥偉,等.雷達目標檢測與恒虛警處理[M].2版.北京:清華大學出版社,2011.
[11]DI VITO A,MORETTI G.Probability of false alarm in CA-CFAR device downstream from linear-law detector[J].Electronics Letters,1989,25(24):1691-1693.
[12]雷志勇,文必洋,彭 念,等.基于恒虛警的高頻地波雷達低速目標檢測研究[J].電波科學學報,2007,22(5):774-778.LEI Zhiyong,WEN Biyang,PENG Nian,et al.CFAR-based HFSW radar low Doppler target detection[J].Chinese Journal of Radio Science,2007,22(5):774-778.(in Chinese)
[13]吳昌英,韋 高,許家棟.雷達組網目標檢測性能的概率分析[J].現代雷達,2007,29(6):54-56.WU Changying,WEI Gao,XU Jiadong.Probability analysis of netted radar target detecting[J].Modern Radar,2007,29(6):54-56.(in Chinese)
[14]RAGHAVAN R S.Analysis of CA-CFAR processors for linear-law detection[J].IEEE Transactions on Aerospace and Electronic System,1992,28(3):661-665.
[15]潘 超,文必洋,周 浩.單極子-交叉環天線陣波束形成的分析[J].電波科學學報,2013,28(1):7-13.PAN Chao,WEN Biyang,ZHOU Hao.Analysis of array beamforming based on crossed-loop/monopole antenna[J].Chinese Journal of Radio Science,2013,28(1):7-13.(in Chinese)
[16]ROARTY H J,LEMUS E R,Handel E,et al.Performance evaluation of seasonde high-frequency radar for vessel detection[J].Marine Technology Society Journal,2011,5(3):14-24.
[17]ROARTY H J.,BARRICK D E,KOHUT J T,et al.Dual-use of compact HF radars for the detection of mid and large-size vessels[J].Turkish Journal of Electrical Engineering and Computer Sciences,2010,18(3):373-388.
[18]DZVONKOVSKAYA A,ROHLING H.HF radar performance analysis based on AIS ship information[C]//Radar Conference.Washington:IEEE Press,2010:1239-1244.
[19]ROOT B T.HF over-the-horizon radar ship detection with short dwells using clutter cancellation[J].Radio Science,1998,33(4):1095-1111.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
